基于复回归分析的电动自行车风险驾驶行为研究 *
2022-02-10常梦莹顾国斌李文勇
周 旦,常梦莹,顾国斌,李文勇
(桂林电子科技大学 建筑与交通工程学院,广西 桂林 541004)
0 引 言
电动自行车以其方便、快捷、环保、可达性高等优点日益成为居民倾向选择的出行方式[1],但电动自行车的大幅增加给城市管理和道路安全带来了巨大挑战[2]。据统计,2018年全国交通事故发生数总计244 937起,其中电动自行车交通事故数23 716起,造成3 741人死亡。电动自行车事故主要原因是车速过快、制动性能差等。同时,因电动自行车驾驶员安全意识淡薄、违反交通规则、变道抢道以及相关部门缺乏监督、法律法规不完善也是导致事故发生的原因。从交通事故分析来看,人是交通事故发生的重要因素[3],且其中95%左右的事故都与驾驶员风险驾驶行为有关[4]。因此,有必要对驾驶员的“风险驾驶行为”进行研究。
J.REASON等[5]最早构建了机动车驾驶员风险驾驶行为量表DBQ(driving behavior questionnaire),为之后相关方面研究提供了参考;因生理和心理特征差异,不同驾驶员风险驾驶行为存在一定差异性[6],比如性别和汽车驾驶经验都与交通事故相关,男性比女性更有可能发生过失事故,拥有机动车驾驶证的驾驶员比没有驾驶证的更不可能发生事故[7],年轻驾驶员因不够成熟稳重,再加上驾驶经验相对有限,更易导致风险驾驶行为[8];郑东鹏[9]利用问卷调查和驾驶仿真法研究发现事故记录、驾驶里程、驾照持有时间、违规记录等对驾驶员的危险感知有影响;M.A.MACHIN等[10]研究认为,风险感知可分为自我意识和情感认知,自我意识是驾驶员对未来道路交通事故可能性、驾驶信心及驾驶行为的看法,而情感认知是驾驶情绪风险感知,例如对各种驾驶情况(例如速度、逆行等)的关注程度。
目前关于机动车和摩托车驾驶员风险驾驶行为的研究较为充分,国内一些学者也开始针对电动自行车驾驶员的驾驶行为进行研究。如:王涛[11]提出了风险驾驶行为与电动自行车驾驶员安全态度及风险感知有关,同时驾驶自信又可通过安全态度和风险感知间接影响驾驶行为。笔者对安全知识、安全态度、风险感知等因素对驾驶行为的影响程度进行探讨。
1 研究方法
1.1 样 本
截至2016年底,桂林市电动自行车数量已达到70万辆,根据统计数据:2011—2018年,因电动自行车引起的交通事故共计2 999件,其中因交通事故导致的死亡事件341起,受伤事件2 294起,财产损失364起,具体数据如图1。
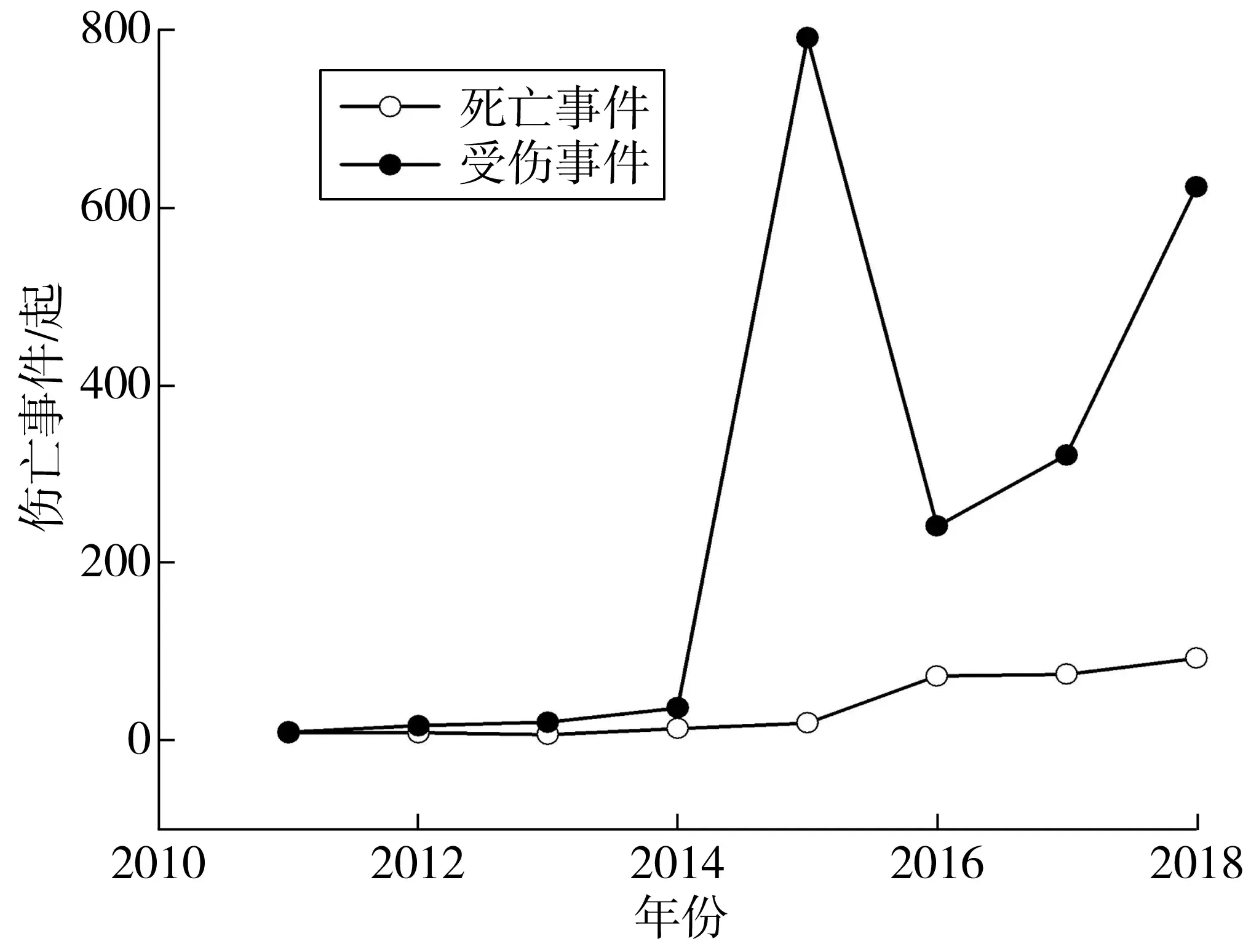
图1 2011—2018年桂林市交通事故概况Fig. 1 Overview of traffic accidents in Guilin from 2011 to 2018
笔者在研究中,将可研究母体近似为无穷大,故其样本量计算如式(1):
(1)
式中:n为样本个数;e为抽样误差所能容许范围;z为置信区间在1-α下的标准常态分配的查表值;p为母体事件出现几率。
在95%置信区间下,z=1.96,e在[-5%,+5%]范围内,按照误差最大值计算(即p=0.5),可知所需调查样本数最少要385份。
笔者随机对桂林市4个主城区的500名电动自行车驾驶员开展问卷调查,回收有效问卷411份,其样本基本信息情况如表1。
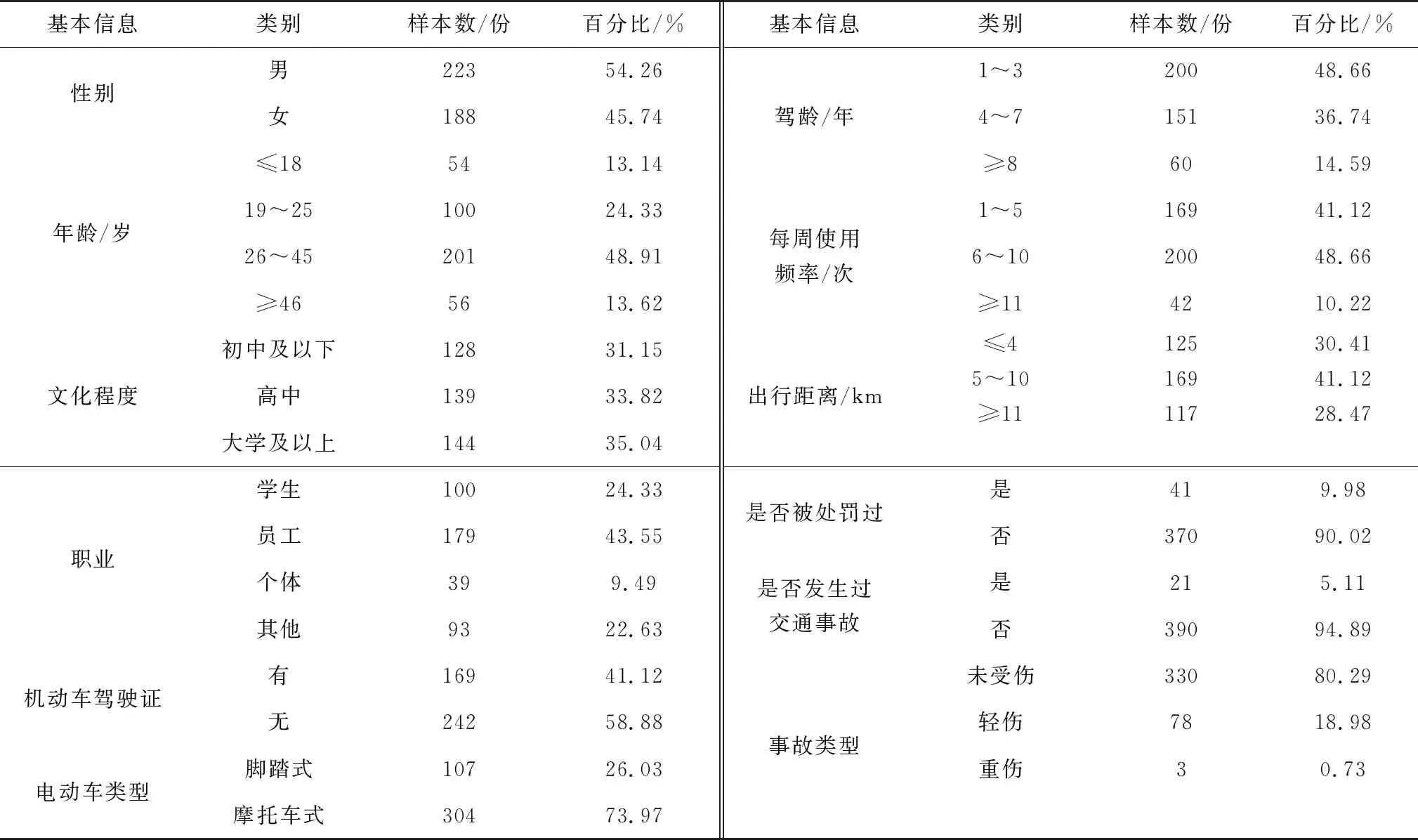
表1 样本基本信息情况Table 1 Basic information of samples
1.2 研究工具
本研究中的量表共包含个人信息量表、驾驶安全知识量表、交通安全态度量表、风险感知量表和风险驾驶行为量表这5个部分。
1.2.1 个人信息量表
基本信息主要由以下几部分组成:年龄、性别、受教育程度、是否具有机动车驾驶证、驾龄、职业、驾驶频率、每天驾驶距离、是否发生过交通事故及事故类型电动自行车类型。
1.2.2 驾驶安全知识量表
笔者参考中国公安部发布的《机动车驾驶证申领和使用规定》,共设计8道单选题,从法规标志与路权概念、防卫性与礼貌性驾驶观念两个方面考察受访者的知识储备。受访者根据自己知识储备选出自己心中的正确答案。答对1题则积1分,所得分数越高,表明受访者驾驶知识越充裕。
1.2.3 交通安全态度量表
参考文献[12],笔者共设计11题,包含3个方面:责任态度、违规态度、群体行为态度。采用Likert的五级评分法来衡量,受访者根据自己平时驾驶经验进行等级选择。责任态度分数越高表示受访者责任感越强,违规态度分数越高表示受访者越倾向于违规,群体行为态度分数越高表示受访者越倾向于冒险。
1.2.4 风险感知量表
所量测的风险感知包含两个子构面:第1个子构面选择由文献[13]发展出的担忧与关心量表,该量表包含3个问题,从“非常不同意”“比较不同意”“不确定”“比较同意”到“非常同意”依次记为1、2、3、4、5分;第2个子构面是借鉴文献[10]提出的危险认知量表,该量表包含对危险行为认同程度的判断,从“非常不同意”“比较不同意”“不确定”“比较同意”到“非常同意”依次记为1、2、3、4、5分。分值越高,表明受访者越担心和关注交通风险,同时对于危险认知程度越高[14]。
1.2.5 风险驾驶行为量表
笔者以驾驶行为问卷(DBQ)为主要范本,参考国内外文献设计修改,引入侵略行为,共分为侵略行为、疏忽行为、违规行为3个构面。本量表以Likert的五级评分法来衡量每个问题的发生频率,其中:“1分”表示从不如此,“2分”表示很少如此,“3分”表示有时如此,“4分”表示经常如此,“5分”表示总是如此;分值越高代表会有以上行为的频率越高。
1.3 调查和统计处理
通过统计分析可知:驾驶安全知识量表、交通安全态度量表、风险感知量表、风险驾驶行为量表的各Cronbach’sα值均大于0.5,表明数据信度较好;各KMO值(Kaiser-Mayer-Olkin)均大于0.6,表明能充分反映考察的内容[15-16]。各因素Cronbach’sα值和KMO值如表2。
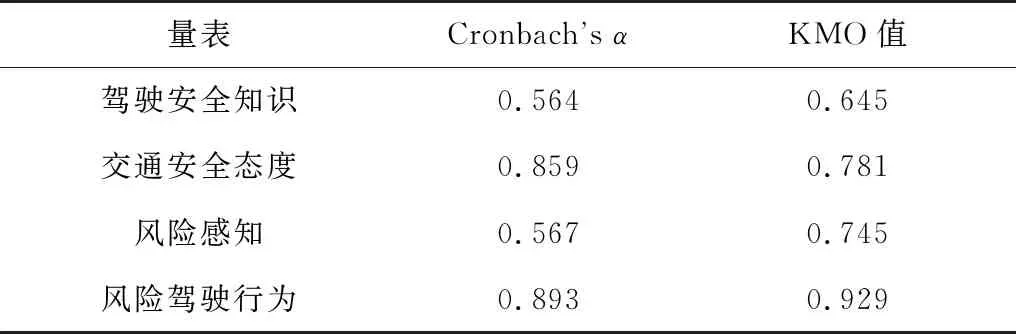
表2 各因素的Cronbach’s α值和KMO值Table 2 Cronbach’s α value and KMO value of each factor
1.4 分析方法
复回归分析目的在于将多个有用的预测变量纳入回归方程式中,以减少残差并增加解释变量对被解释变量的解释能力。笔者采用逐步回归分析法,先设定自变量的Fmax及Fmin值,然后交叉运用顺向选择法及逆向淘汰法,最后留下自变量Fmin≤F≤Fmax。
在复回归分析中,为确保结果的稳定度与可信度,首先需进行复回归模式参数估计值的方差膨胀系数检验,以确定自变量之间是否存在线性重合,并采用Durbin-Watson方法(DW值)检验自变量之间的自相关性;在通过假设检验后,以F统计量检验整体回归模型是否成立;再通过修正后的判定系数确定能够解释因变量变异的比例;最后通过t检验来检测主要影响因素的解释力及显著程度。复回归分析模型检验准则如表3。

表3 复回归模型检验准则Table 3 Test criteria of multiple regression model
2 结果分析
根据上述检验准则筛选出安全知识、安全态度(3个因子)、风险感知(2个因子)、受访者年龄共7个主要影响因素作为自变量;风险驾驶行为中的侵略行为、疏忽行为、违规行为共3个因子作为因变量。
2.1 建立模型
在回归模型中,风险驾驶行为Y(Y=y1,y2,y3)为被解释变量,其中:y1为侵略行为,y2为疏忽行为,y3为违规行为;安全知识x1、责任态度x2、违规态度x3、群体行为态度x4、担忧与关心尺度x5、风险感知尺度x6、受访者年龄x7这7个变量作为解释变量,采用复回归分析方法分别分析这7个变量对侵略行为、疏忽行为、违规行为的影响程度。利用SPSS软件建立风险驾驶行为Y的复回归模型,假设Y与x1、x2、…、x7有如式(2)的关系:
Y=β1x1+β2x2+β3x3+β4x4+β5x5+β6x6+β7x7+c
(2)
式中:c为随机扰动项;β1、β2、…、β7分别为回归系数,其绝对值大小表示相应变量对Y的解释程度,其正负情况表示相应变量对Y的影响方向。
2.2 侵略行为复回归分析
以侵略行为为因变量,进行逐步回归分析。模型中选入自变量分别为责任态度x2、群体行为态度x4、担忧与关心尺度x5。
F=23.858,P=0.000,即该回归方程是显著的。最大VIF统计量为1.138,表示无线性重合现象;DW值为1.500,表示在可接受范围内无自我相关问题;R2=0.601,表示责任态度、群体行为态度及担忧与关心尺度可解释侵略行为的60.1%变异,如式(3),计算结果如表4。
y1=-0.105x2+ 0.368x4- 0.128x5+ 3.965
(3)

表4 侵略行为复回归分析结果Table 4 The multiple regression analysis results of aggressive behavior
2.3 疏忽行为复回归分析
以疏忽行为为因变量,进行逐步回归分析,结果模式选入3个自变量,分别为安全知识x1、责任态度x2及年龄x7。
F=21.218,P=0.000,即该回归方程是显著的。最大VIF统计量为1.102,表示无线性重合现象;DW值为1.542,表示在可接受范围内无自我相关问题;R2=0.485,表示疏忽行为48.5%的变异是由于年龄、安全知识及责任态度的变异引起的,如式(4),计算结果如表5。
y2=-0.108x1- 0.148x2- 0.229x7+ 2.237
(4)

表5 疏忽行为复回归分析结果Table 5 The multiple regression analysis results of negligent behavior
2.4 违规行为复回归分析
以违规行为为因变量,进行逐步回归分析,结果模式选入4个自变量,分别是违规态度x3、群体行为态度x4、担忧与关心尺度x5及年龄x7。
F=42.795,P=0.000,即该回归方程是显著的。最大VIF统计量为1.500,表示无线性重合现象;DW值为1.846,表示在可接受范围内无自我相关问题;R2=0.55,表示违规行为55%的变异是由于年龄,违规态度群体行为态度和担忧与关心尺度的变异引起的,如式(5),其结果如表6。
y3=0.180x3+ 0.112x4- 0.142x5- 0.116x7+1.555
(5)
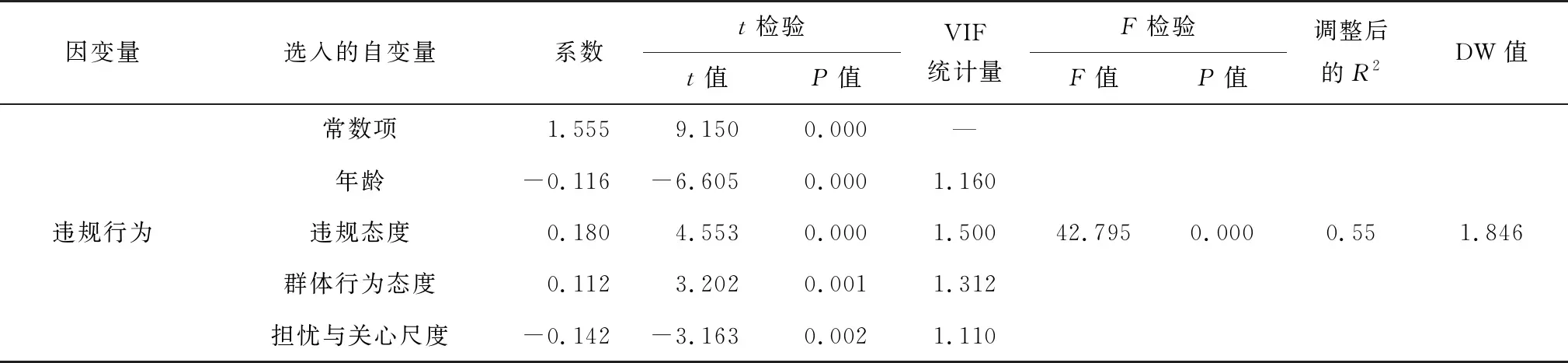
表6 违规行为复回归分析结果Table 6 The multiple regression analysis results of violations
3 讨 论
笔者主要分析了安全知识、安全态度、风险感知等构面对驾驶行为影响程度。
关于侵略行为,研究结果显示责任态度、担忧与关心尺度与侵略行为呈负向影响,即随着责任态度认同程度以及担忧与关心尺度的增加,侵略行为的发生频率以及下降;群体行为态度与侵略行为呈正相关,即群体行为态度认同程度的增加,侵略行为的发生频率增加,其中群体行为态度的β估计值系数为0.368,表示群体行为态度为所有自变量中影响最大的变量,因此笔者推测侵略行为发生是因为电动自行车驾驶员明显的群体行为态度,并非是因为风险感知等其他因子造成的电动自行车驾驶员蓄意侵略。
关于疏忽行为,研究结果表明:年龄、安全知识、责任态度均与疏忽行为呈负向影响,即年龄和安全知识以及责任态度认同程度增加可减少疏忽行为的发生频率,其中疏忽行为与安全知识、安全态度的负向关系与国内一些学者研究结果一致。
关于违规行为,研究结果显示:年龄、担忧与关心尺度与违规行为呈负向影响,即随着年龄和担忧与关心尺度的增加,违规行为发生频率大大减少;违规态度和群体行为态度与违规行为呈正向影响,即违规态度和群体行为态度的认同程度越高,违规行为发生的频率也就越高。
安全知识对于非蓄意疏忽行为呈显著负向影响,但对蓄意违规行为及侵略行为没有显著影响,表示若想有效地降低电动自行车驾驶员疏忽行为的发生频率,可从加强电动自行车驾驶员的安全知识方面入手[17],应结合差异性分析寻找出安全知识能力较低的族群,例如年龄较大、驾驶经验丰富的电动自行车驾驶员,可能由于其自以为经验丰富或许久未接受最新的安全知识而出现疏忽行为。对于蓄意危险驾驶行为,可从电动自行车驾驶员的安全态度和风险感知等方面着手进行防范。
4 结 语
笔者采用复回归分析法,从安全知识、安全态度、风险感知这3个尺度对风险驾驶行为的影响程度进行了研究。研究结果表明:侵略行为发生是因为电动自行车驾驶员明显的“群体行为态度”;提高安全知识掌握程度可有效减少电动自行车驾驶员因疏忽而产生的风险行为。
