无人机智能巡检在风电光伏故障检测中的应用
2022-02-08中国电建集团江西省电力建设有限公司
中国电建集团江西省电力建设有限公司 张 龙
为保障人类社会的可持续性发展,新能源逐步取代传统化石能源是一个必然趋势。在新能源行业结构中,我国风电、光伏产业发展尤为迅速,截至2022年第一季度,全国风力发电装机容量约为3.4亿kW(同比增幅17.7%)、光伏发电装机容量约为3.2亿kW(同比增幅23.6%),排名均为世界首位。客观上,我国风电光伏产业的飞速发展与国家新能源政策引领密不可分,如国家能源局发布的《关于2021年风电、光伏发电开发建设有关事项的通知》中,明确了风力发电、光伏发电在实现“碳达峰”战略上的重要性,国务院印发的《2030年前碳达峰行动方案》也明确指出,风电光伏两种新能源产业是“节能降碳增效行动”的基础和保障。
1 无人机智能巡检概述
广义上来讲,无人机是一种航空设备,按其用构型划分种类丰富、形态各异,如旋翼无人机、固定翼无人机、扑翼无人机等。狭义上来讲,无人机是一种载具[1],在风电光伏故障检测中的应用的类型主要是多旋翼无人机(如四旋翼、六旋翼无人机)。多旋翼无人机的优势在于,其能够在各种复杂的环境中实现高操控性,如在特定高度悬停、在不平整的地面垂直起降、能够低空低速飞行等。因此,要执行无人机智能巡检工作,一台功能效用符合需求的多旋翼无人机设备是不可或缺的,除此之外,还需要在无人机设备上搭载数据收集系统、红外识别系统、RTK(real-time kinematic)定位系统、动态图像识别系统、人工智能(AI自动化)系统等。在此基础上,无人机及所搭载的各种装备,与地面站(客户端+控制平台)建立起数据链,实现风电光伏故障检测数据的传输、存储、处理等(如图1所示)。

图1 无人机智能巡检系统示意图
其中,无人机智能巡检过程中数据收集工作,主要由高清红外摄像头完成,需要满足白昼、夜间不同亮度条件下的工作需求。RTK定位技术即“实时动态定位技术”,相比传统的GPS定位技术适应性更强、精准度更高,利用两个测量站载波相位观测的方法,为无人机实时提供三维定位,尤其在山地、丘陵等障碍要素较多的环境下,可以较好地解决信号干扰、噪声过大的问题[2]。动态图像识别系统用于处理故障信息,该系统内部包括了无线传输、动态图像处理、逐帧抽取、图像增强等模块,能够精准定位高速运转的风电机组叶片缺陷。人工智能系统包括飞行自动化、处理自动化、“AI云”等要素,其中人工智能算法是关键,可用于自动识别、提取关键检测点,如风叶、风筒、绝缘子等,按照预先场景设定,可自动分拣处裂纹、破损、无电等故障形式。
2 风电光伏故障检测的共同点与差异性
电力能源是现代文明的基石,在维系科技进步、促进经济增长、服务国计民生等各领域发挥着不可替代的作用。随着“绿色环保”“节能低碳”“生态保护”等概念兴起,传统电力生产方式逐步瓦解,新能源电力(风电、光电、水电等)生产因为具有可再生的优势,已然成为全球电力能源的发展潮流。我国风电光伏产业经历了系统性技术沉淀、激烈的市场竞争,从产业规模及产品性价比上分析,已然是处在全球领导者地位。但这种优势主要表现在技术、产能、价格等头部领域,在风电光伏故障检测方面仍然有较大的提升空间。通过详析分析风电与光伏设备故障检测的共同之处、差异之处,有利于更高效地运用无人机智能巡检技术。
2.1 风电光伏故障检测的共同点
直观上看,风力发电设备与光伏发电设备所处的空间均为自然环境,在故障检测过程中,工作人员的场景切换较为频繁、物理距离的绝对值偏大,由此导致了如下共同问题。
一是单位时间内的工作量较大,平均检测效率较低。近年来,我国风电光伏产业规模不断扩大,总装机容量不断提升,这一现象对于故障检测提出了巨大挑战。以风电为例,为了更好地利用风力资源,主要建设在海上、草原、戈壁等地区,庞大的风电产面积本身就造成了故障检测压力,再加上复杂的地理、水文等环境因素,采取人工方式很难高效地进行检测工作。
二是人工故障检测方式面临难度高、质量差的问题。无论风电还是光伏,很多故障隐患并不明显,如多晶硅太阳能电池板出现裂纹、损伤,但很容易被植被、灰尘等覆盖住,又如风叶的涂层脱落、表面裂纹等,在高速运转的状态下并不容易察觉,必须停机后借助攀爬设备近距离观察。这无疑会导致风电光伏故障检测的复杂度提高,无法进行经常性的巡视[3]。同时,风电光伏的供电系统也较为复杂,即便人工检测的过程中,也需要用到大量设备,而自然环境下的温度、压力等变化,也会干扰到检测的精准度。
三是传统人工故障检测受到的限制条件过多,如后勤保障不到位、突发天气情况、数据记录误差等,这样就很难满足风电光伏故障检测的实时性。
2.2 风电光伏故障检测的差异性
一个风力发电机的构成包括地基、电网接口、梯子、风塔、风叶、测量装置、风向追踪装置等,从结构上来看,故障检测是基于主要“垂直方向”进行的(如图2所示)。一个光伏发电机组包括多个光伏组件(太阳能电池方阵),再经由充电控制器、逆变器、配电柜、电子限荷保护装置、防雷电隔离装置等,最终并入到电网。从结构上来看,故障检测是基于“水平方向”进行的(如图3所示)。很显然,风电与光伏故障检测方面,由于设备布局的不同,造成了巡检路线模式的差异。
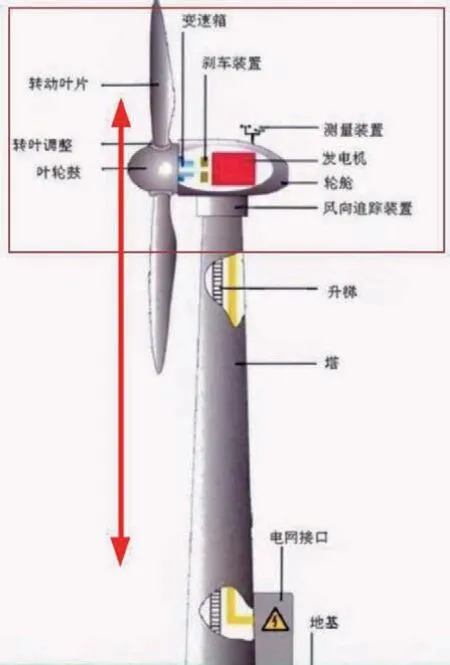
图2 风力发电设备故障巡检路线(垂直)

图3 光伏发电设备故障巡检路线(水平)
3 无人机智能巡检在风电故障检测中的应用
3.1 无人机的机型及参数
作为风电故障检测装置的搭载设备,无人机要能够充分应对风电场的复杂环境,并对风叶干扰具有一定的修正能力。适用机型的整体要求如下:一是具备较长续航能力,由于风力发电机组间隔距离较大,需要无人机长时间滞空,因此续航能力必须有所保障,可选择油电混合动力机型。二是配备高精度相机,为了避免风叶与无人机碰撞,两者之间必须保持一定的安全距离,可搭载30倍光学变焦相机(包括红外功能),在20~30m左右的距离进行监控。三是无人机内置巡检路线规划功能,即再终端控制平台上,能够基于电子地图、定位系统等,同时安排多个检测目标,无人机能够做到自主规划最优路线。四是基于人工智能技术,自动识别各种故障及潜在隐患,尤其要确保部件细节的检测,如合模缝、扇叶形变、叶尖检测等,具体参数见表1。

表1 风电故障检测无人机参数
3.2 无人机智能巡检流程
无人机智能巡检应用在风电设备之前,需要先为人工智能系统提供足够的人工检验样本,简单地说,就是从已经存在各种类型故障的风机设备上,挑出具有代表性的,然后由无人机进行巡检并记录信息,通过这种深度学习的方式,可以避免后期人工分析的麻烦。以风叶为例,具体流程如图4所示。

图4 风叶故障检测识别模式
利用电子地图,标注一定区域内风电机组的位置,在执行智能巡检的过程中,由人工智能系统自动规划最优路线。需要注意的是,这一过程中风力发电机组并不需要停机,因此除了考虑外部环境的影响外,还要选择一个适当的时间点,确保风叶运转处在较容易识别的状态下,如10:00~14:00时间段内,外部光线的条件较为优越。整个巡检流程为:首先,确定初始化的风机位置信息,基于人工智能自动展开风机位置建模,并规划巡检路线。其次,根据反馈到客户端的图像数据,确定风机朝向。再次,进行定点图片的拍摄,主要滞空位置是风叶正向,下沉、上浮的区间为风叶最低点和最高点,并从最高点绕道风叶背面进行观测。最后,根据实现设计好的路线返航。
3.3 无人机智能巡检路径
对于一般风电场的故障检测而言,无人机智能巡检路径的设计不是一蹴而就的,需要在实践过程中不断调整算法,如基于遗传算法、退火算法、蚁群算法等规划无人机智能巡检路径,最后对比单次巡检的实践与故障检测效果。比较有效的巡检路线规划方式,首先可以利用聚类系数调整无标度网络,获得较为完整的风电设备节点图,再将平均风力、海拔、湿度等平均值代入到数学模型中,如风口位置应该放在节点网络的哪一个位置最为优越,可以基于蚁群算法达到最佳收敛速度效果;对于较为复杂的风电场,首先可以执行个体交叉,再执行个体变异,由此模拟出退货状态函数产生的新个体。在此基础上,执行个体模拟退火操作,判断抽样的稳定性,如果这种算法下的路径较为稳定,则可以进行个体复制,输出当前最优的个体。
4 无人机智能巡检在光伏故障检测中的应用
4.1 无人机的机型及参数
由于光伏发电设备的垂直高度较低,对于无人机的飞行高度没有太大要求,因此常规的多旋翼无人机都能很好地满足要求。应用于光伏故障检测的无人机设备需要满足以下的条件[4]:一是在光伏电场执行智能巡检任务时,能够自动避让障碍物。二是在起飞、返航、落地等过程中,对于地面环境的要求较小。三是由于光伏发电设备以水平方向、大面积化铺开,因此也需要无人机具有出色的续航能力。四是在巡检过程中可以自动拍照、存储、传输数据。五是为了便于在大空间内定位无人机,自身要搭载较高精度的定位系统;具体参数见表2。

表2 光伏故障检测无人机参数
4.2 无人机智能巡检流程
针对光伏故障检测,同样需要人工检测确立故障样本,然后由无人机进行智能巡检,以提高故障检测识别度,整个流程与风叶故障检测识别模式类似。但区别之处在于,无人机智能巡检光伏电场的过程中,是基于一定区域进行的,这就需要考虑每个区域的光伏组件数量与如何分布。如太阳能电池板以“n×n”的方式分布,为了快速进行遍历,比较适合采用螺旋形(由外向内)的巡检流程,这样可以节省大量的飞行时间。如果太阳能电池板以“m×n”的方式分布,需要考虑平面坐标系内X轴、Y轴的长度比,在单位长度内的节点数量相同,如果X轴远超过Y轴的长度(反之亦然),则比较适合采取“蛇形路线”,如果X轴与Y轴的长度接近1:1,则比较适合采用“往复路线”。
4.3 无人机智能巡检路径
首先,在电子地图上圈定光伏电场的范围,按照太阳能电池板的排列紧密程度,大致划分出若干个区域。其次,在起飞之后获取某一个区域的视频、图片数据,判断该组数据中是否存在光伏组串。再次,如果存在光伏组串的问题,需要重新计算巡检列数、重新设计转弯策略,然后直线起飞重新开始新一轮的检测。最后,直到全部规避数据中的光伏组串问题,确定最优化的巡检路径。
5 结语
综上所述,我国风电光伏发展已经突破了主要的技术壁垒与产能局限,且具有较强的市场、法律、政策等风险抵御能力,而影响风电产业、光伏产业稳定的主要因素集中于运维领域。因为风力发电、光伏发电的核心元件(如风叶、叶轮鼓、太阳能电池板、并网逆变器)长期暴露在自然环境状态下,随着作业周期的延长出现故障、损伤的概率随之增加。因此,如何高效率、高质量地实现风电光伏故障检测,是确保我国新能源产业平稳发展的关键所在。
