融合聚类算法与YOLO-v3 网络在果蔬种植防虫害中的应用研究
2022-02-08武珊
武 珊
(青海高等职业技术学院,青海 海东 810600)
在农业信息化技术不断发展的当下,果蔬的虫害防治依旧面临害虫检测效率低下的问题,同时也导致了农药智能喷洒精度低的状况。果蔬种植的虫害防治不仅要依靠田间实地调查,同时也需要依靠机器学习算法来提高效率、节约资源[1]。YOLO神经网络检测算法一经提出,便被国内外学者不断地发展和完善,在目标检测场景中,应用效果越发突出[2]。而ISODATA聚类分析方法增加了对聚类结果的“合并”和“分裂”操作,避免了K-means算法随机K值的缺陷[3]。笔者将两者融合,应用于果蔬种植的虫害检测识别中,旨在提高虫害检测的效率和精度,从而减少农业生产中的资源浪费。
1 文献综述
针对智能交通检测图像中小目标检测率低的问题,杨飞等[4]提出了一种YOLO-v3的改进方法,并通过SPP模块实现了局部特征和全局特征的融合提取,试验结果表明:改进后的YOLO-v3算法能有效地检测小目标,对小目标的平均准确率具有显著的提升。同样,基于智能交通图像中小目标检测问题,黄开启等[5]则对YOLO-v3的Darknet-53网络结构进行了优化调整,结果表明:改进算法在小目标检测中的平均准确率为78.8%,取得了较好的小目标检测效果。王霏等[6]则提出了基于改进YOLO-v3算法的文本检测方法,用于改善深度学习中文本检测算法存在的运行速度慢、模型体积大等问题,结果表明:该改进算法精度比YOLO-v3提高了7个百分点,检测速度最高可达22帧/s,与同类算法相比,具有更快的检测速度和更小的模型体积。于博文等[7]则将改进的YOLO-v3算法应用于军事目标检测中,在军事目标图像数据集中测试结果表明:该算法具有较好的检测性能,可为战场态势生成、分析提供有效的辅助技术支持。在垃圾分类方面,王子鹏等[8]引入MobileNetv3网络替代YOLO-v3的主干网络Darknet53,试验表明:该算法能够满足边缘计算设备的要求,具备潜在的商业应用价值。屈文谦等[9]提出了基于YOLO-v3的电网作业现场安全帽佩戴检测算法,有效检测电网作业人员不规范佩戴安全帽行为,结果表明:算法在复杂作业场景下能够实现有效的检测,可为避免电网作业人员安全隐患提供技术参考。刘寅[10]融合K-means聚类算法和YOLO-v3网络,用于教室内的人物目标识别场景,试验表明:改进后的YOLO-v3网络模型的识别精度提高了19.11%,但识别速度有所下降。在信息化控制领域,朱江等[11]提出了一种基于YOLO-v3的端到端的抓取检测方法,应用于机器人抓取系统的检测模块,试验表明:基于YOLO-v3的抓取检测算法可以有效地提高检测的精度和速度。陈耀祖等[12]使用模糊ISODATA动态聚类算法,对YOLO-v4网络的先验框数目进行优化,该方法应用于智能交通的行驶车辆的要素检测时,训练集中的类间平均准确率为98.56%,检测帧频为41.43帧/s。ISODATA聚类算法同样被王磊等[13]应用于地理信息检测领域,试验表明:该模型满足洪水变化监测的需求,可用于洪水易发区的洪涝灾害灾情分析。
在农业果蔬种植中的虫害防治方面,张建[14]因地制宜地分析了不同区域的苹果树常见病虫害,同时,分析了其对应的治理技术。国内学者薄晓华[15]分析了林业技术对治理林业病虫害的作用,期望通过减少了林业病虫害,达到保护生态环境的目的。类成敏等[16]提出了一种基于多尺度注意力残差网络的桃树害虫图像识别模型,试验表明:该模型识别准确率为93.27%,取得了较好的识别效果。姚青等[17]提出了基于双线性注意力网络的农业灯诱害虫细粒度图像识别模型,试验表明:基于双线性注意力网络的农业灯诱害虫细粒度图像识别模型,可以自动识别6类相似的19种农业灯诱害虫,提高了农业灯诱害虫自动识别的准确率。刘迦南等[18]将LIBSVM工具应用于害虫性别判别中,结果表明:利用该方法可以对害虫性别作出有效判别。
综上所述,国内学者在应对农业和林业领域的病虫时,不仅通过地域信息与气候信息的整合,也利用了深度学习、机器学习算法,如SVM和双线性特征提取等前沿技术。本研究也从基于CNN网络的位置回归算法YOLO中探索了提高果蔬害虫识别精度的模型。YOLO-v3网络在国内学者的探索开发中已然趋于成熟,在智能角度、电气工程和军事检测中均有应用。本研究也通过融合ISODATA聚类算法和YOLO网络检测技术识别果蔬害虫,期望为果蔬的虫害防治和检测提供科学识别模型的支持。
2 果蔬种植防虫害的YOLO-v3目标检测模型的构建
2.1 YOLO-v3网络的图像数据提取
在计算机硬件条件落后的前几十年,传统的目标检测算法通常利用图像HOG特征提取与分类器算法决策完成。随着计算机技术和算力资源的不断发展,图像特征提取的方法从人工经验构建发展为了HOG算法提取,再发展到现在常用的卷积神经网络(Convolutional Neural Network, CNN)识别[19]。在目标检测算法更新的过程中,图像识别的精度和计算效率也不断提高。雷世威等[20]构建的YOLO-v3(You Only Look Once-v3)果蔬虫害目标检测原理是基于卷积神经网络的深度学习回归。单一的CNN网络随着图像数据量的增加会出现梯度消失的问题,导致识别分类精度下降。因此,研究引入YOLO-v3方法主要是通过其残差网络结构避免CNN模型损失值居高不下的震荡状态。CNN网络在图像目标检测中的应用结构如图1所示。
由图1可以看出,卷积神经网络在图像目标识别中的卷积层的运算为核心模块,包括了卷积运算、池化运算以及激励函数运算3个数据处理层。其余结构部分包括图像数据预处理的图片输入层和结果输出层。本次研究应用到的激励函数计算表达公式如式(1)所示。
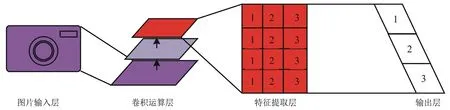
图1 CNN网络在图像目标检测中的应用结构

式(1)为卷积神经网络的ELU激励函数,其中α表示修正数据分布的常数。CNN网络中的卷积运算首先需要对果蔬的病虫害图像进行预处理。研究针对果蔬虫害构建图像数据集,首先通过平移图像扩充数据量,增加CNN模型的运算精度,其图像在平移操作之后的矩阵表述如式(2)所示。

式(2)中,M表示平移后的图像矩阵模型。(x0,y0)表示原图像的像素位置,(x1,y1)表示平移后的图像像素位置。△x和△y分别表示图像在横从坐标上的移动量。此外,通过对图像的水平翻转和垂直翻转同样可以扩充图像数据量,其矩阵模型表述如式(3)所示。
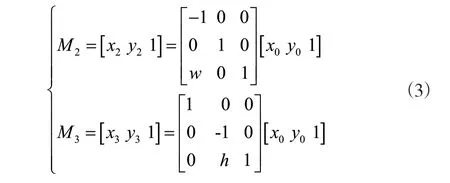
式(3)中,M2和M3分别表示图像水平翻转和垂直翻转之后的图像矩阵模型。(x2,y2)和(x3,y3)分别表示图像水平翻转和垂直翻转之后的像素点位置,w和h分别表示图像的宽度和高度。针对网络爬取的虫害图像数据集的缺点,为了准确地检测果蔬害虫,研究采用非整体标注方法平衡虫害的整体像素,避免害虫在图像中像素点的分布不均而导致的农药喷洒定位精度下降,其中,用于检测图像像素点比例的有效像素比(Effective Pixel Proportion, EPP)的计算公式如式(4)所示。

式(4)中,SO和SM分别表示有效像素数和图像最大像素数。
2.2 基于聚类算法的YOLO-v3特征提取网络识别优化方法
卷积神经网络在应用于果蔬的虫害识别时,输出结果并非传统分类的最大概率显示,而是通过计算得出害虫属于哪种分类。作为在CNN网络回归中应用最广泛的方法之一,Darknet-53是YOLO-v3模型的核心结构[21]。由于模型将要利用不同的特征提取尺度获得图像的特征信息,因此,首先需要对图像进行栅格化处理。通过算法的位置回归计算得出害虫所在的栅格块位置,并引入传统RCNN网络中的提取预选框方法(Region Proposal Network, RPN)分辨出检测栅格块的害虫目标个数[22]。YOLO-v3模型的损失函数包括了像素点位置的损失、图像高宽值的损失、置信度的损失以及分类类别的损失。模型的边界框位置损失函数由像素点位置的损失、图像高宽值的损失组成,其表述如式(5)所示。

式(5)中,lB为边界框位置损失函数,l(x,y)为像素点位置的损失,l(wh)表示图像高宽值的损失。i和j分别表示栅格预测的编号和预测网格边界框的编号。S2表示图像的栅格总数,N表示单个网格的预测边界框数量。(xi,yi)为预测边界框的中心点位置,(则表示实际的边界框中心点位置。式中的 权重参数等于1时,表示待检测网格中确有害虫目标,否则权重为0.1。同时,模型的置信度损失数学表述如式(6)所示。

式(6)中,lC表示模型的置信度损失,^ic表示实际检测目标的置信度,ci表示预测目标的置信度。I表示检测单元格内没有损失的参数,权重参数为1时,表示待检测网格中没有害虫目标,否则权重为0。最后,模型的类别损失数学表述为式(7)。

式(7)中,lca表示模型的类别损失,a表示类别,pi(a)表示第i个栅格中的检测目标属于类别a的预测概率,^ ( )ip a则表示第i个栅格中的检测目标属于类别a的实际概率。研究采用启发式的迭代自组织聚类算法(Iterative self-organizing clustering algorithm, ISODATA)获取anchor boxs。设定K0个初始聚类中心,其合集表示为Z={z1,z2,…,zK0},设定初始聚类中心之后,计算样本与各聚类中心的距离,距离最小时,表明样本属于该聚类,即:

式(8)中,Dx表示样本x与初始聚类中心zi的距离值最小。样本根据初始分类完成之后,判断聚类的样本数量,如果数量小于最小该聚类域的最小样本数量,则取消该聚类,令K=K-1,并重新计算聚类中心距离进行分配。分配完成之后计算所用聚类样本的中心点,修改聚类中心,其公式用式(9)表示。

式(9)中,Ni表示聚类zi中的所用样本数量。重新确定聚类中心之后,判断分裂与合并操作,即K ≤K0/2时,进行分裂操作;K>K0/2时,进行合并操作。合并操作的思路为计算聚类中心的距离,将最小距离的2个聚类合并为1个聚类,并使K=K-1。分裂操作需要求得每个聚类中样本距离的标准差向量,表示为σi=(σ1i,σ2i, …,σni)T,其中每个向量的分量计算公式如式(10)所示。

式(10)中,σij表示聚类zi内样本到聚类中心的标准差向量分量,Ni表示聚类zi中的所用样本数量,j表示样本的特征向量的维数。求得标准差向量之后取最大值,当最大值大于聚类域中的样本标准差时,则将聚类zi分裂为2个聚类,并令K=K+1。分裂完成之后,重新将聚类中心设定为初始聚类进行迭代,直到达到最大迭代次数。
由于研究的虫害样本数据集来源于网络爬取,图像的宽高和大小均不统一,影响CNN卷积网络的图像输入。出于兼顾模型全局特征提取和局部特征提取的目的,研究在YOLO-v3的卷积层中加入空间金字塔池化(Space Pyramid Pooling, SPP)结构。空间金字塔池化可以有效提升特征的表达能力,同时产生固定的特征向量。空间金字塔池化结构如图2所示。
假设输入图像的大小为WI×HI×CI,分别表示图像的宽、高以及通道数。输出图像大小为n×n× Co,分别表示池化数量和输出通道数。根据以上参数,计算池化层核心大小为池化层步长为同时,池化层的Padding计算公式如式(11)所示。
得出卷积网络池化层的参数则可以得出输出图像的大小,其宽、高表述如式(12)所示。

式(12)中,WO和HO表示输出图像的宽和高。最后,将输入图像的大小参数,分别代入输出图像
大小的计算公式,可以得出以下数学表述。

如式(13)所示,可以得出WO=n,HO=n,表明空间金字塔池化结构接受输入图像的不同大小。根据以上YOLO-v3融合迭代自组织聚类算法的果蔬虫害图像聚类识别,将模型的流程结构用图3表示。

图3 融合迭代自组织聚类与YOLO-v3网络的虫害图像识别模型优化流程
如图3所示,研究所构建的YOLO-v3虫害识别模型在图像预处理阶段,通过平移翻转图像解决了数据集样本数量较少的问题。在图像特征提取阶段采用了非整体标注方法,用于分辨检测栅格块的害虫目标个数。在卷积层池化阶段,引入了空间金字塔池化结构,解决了网络爬取图像大小尺寸不统一的问题。最后,在聚类阶段选择迭代自组织聚类算法,应对传统K-Means算法的K值随机性问题和对网络爬取虫害图像数据样本噪声要求苛刻的问题。
3 改进YOLO-v3模型在果蔬虫害检测中的应用研究
3.1 YOLO-v3果蔬虫害检测模型的仿真训练
本次试验的训练数据集来源于网络图像爬取,图像包括了夏、秋两季常见的5种果蔬植物害虫。害虫图像数据集共计9455个样本,其中,1100个预留为测试样本,其余8355个样本划分为训练样本。具体的果蔬害虫图像样本见表1。
从表1中可以看出,本次用于仿真试验的图像数据集包括了菜青虫、叶蝉、桑天牛、蝽象、飞蛾5种。仿真试验主要应用的软件平台为PyCharm,设置仿真训练的最大迭代次数为8000次,学习率为0.01,权重衰减为0.0005。将训练完成的模型代入其余训练样本中,进行最大次数为100的仿真训练,对比传统YOLO-v3网络模型与优化后YOLO-v3果蔬虫害识别模型在训练过程中的识别精度,具体如图4所示。

图4 传统YOLO-v3网络模型与优化YOLO-v3 的训练结果
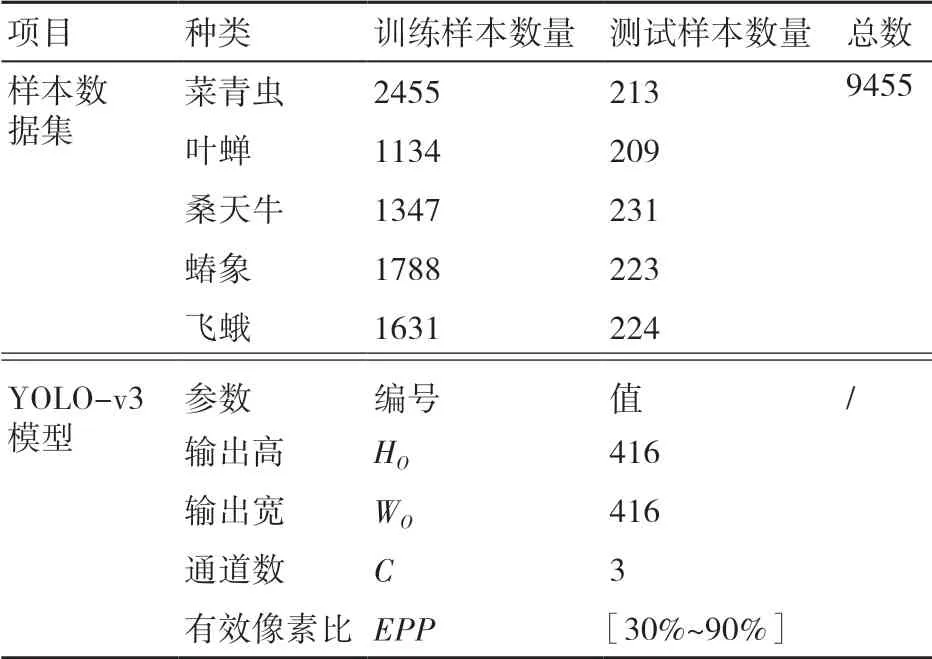
表1 图像样本数据集参数以及改进的YOLO-v3模型参数
从图4可以看出,优化后的YOLO-v3网络模型与传统模型在迭代次数超过40次之后,模型识别精度趋于平稳。优化后的模型的精度在0.8~0.9区间内浮动,而传统的YOLO-v3则在0.7~0.8的精度值区间内变化。同时,本次试验的优化模型的损失值在迭代次数超过40次后,大部分变化均在0.00~0.75之间。完成模型的训练之后,试验将优化模型中的图像非整体标注方法与传统的整体标注方法对比,在测试样本中随机选择30份图像样本,对比不同标注方法对模型识别性能的影响,具体测试结果如图5所示。
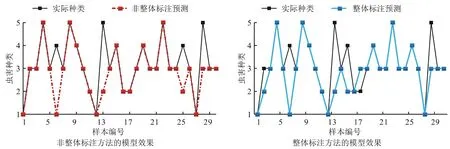
图5 不同标注方法下YOLO-v3模型的害虫识别性能
图5 中纵轴的1~5分别表示菜青虫、叶蝉、桑天牛、蝽象、飞蛾5种害虫种类。从折线图可以得知,本次30份样本测试中,采用非整体标注方法优化YOLO-v3模型仅有3处识别错误,识别准确率为90%;而采用整体标注方法的YOLO-v3模型共出现了6处识别失误,识别准确率为80%。试验表明:YOLO-v3模型在处理图像样本时,采用非整体标注方法可以有效地保持模型的分类性能,非整体标注方法比整体标注方法更可靠。在确定了模型的图像样本处理方法之后,本次试验将对有效像素比的数值选择进行仿真测试,验证有效像素比的取值对模型精度性能的影响。本次试验的测试样本从1100个样本中随机选取,有效像素比参数取值为30%、60%、80%、90%,分别在图中以字母a、b、c、d表示,对比结果见图6。
由图6可以看出,在有效像素比值的不同取值情况下,模型的识别精度整体与迭代次数呈正相关。当测试样本的迭代次数为70次时,模型的识别精度最高为采用80%比值的模型,其mAP为90.2%。其次为90% EPP值的YOLO-v3模型,模型的mAP为81.8%。而在60%和30%有效像素比值情况下,模型的最高精度分别为78.1%和62.1%,其值远低于90%和80% EPP的情况,因此不作考虑。在图6中,90% EPP的模型最高mAP出现在迭代次数为50次的时候,而在迭代次数大于50次时,模型的精度反而下降。表明在高像素比的情况下,模型的非整体标注图像方法反而使模型损失了更多的图像特征信息。本次试验的最大训练迭代次数超过了50次,因此研究的YOLO-v3模型的图像有效像素比参数取值为80%。至此,模型的训练和参数校对完成,以下试验部分将对模型进行对比,参考不同信息的图像,对模型的识别检测性能进行全面分析。
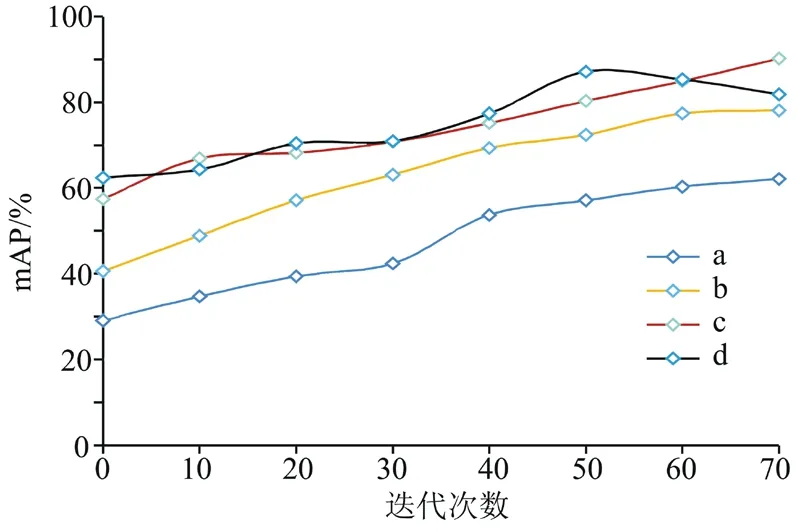
图6 不同有效像素比参数下YOLO-v3模型的害虫识别性能
3.2 YOLO-v3果蔬虫害检测模型的性能测试
为了突出迭代自组织聚类算法和YOLO-v3网络模型在果蔬害虫识别检测中的优越性能,试验将1100份测试样本数据全部代入Faster-RCNN、SSD-300、传 统YOLO-v3和 优 化YOLO-v3模 型中,不同种类害虫的识别精度情况如图7所示。

图7 不同种类害虫的识别精度情况
从图7可以看出,整体的识别精度上优化YOLO -v3优于其他算法。在菜青虫的图像识别中,优化YOLO-v3模型的识别率为86.6%,比Faster-RCNN模型高2.2个百分点,比SSD-300算法高7.5个百分点,比传统YOLO-v3模型高1.1个百分点。而在飞蛾的识别中,优化YOLO-v3模型的识别率同样最高,为87.8%。桑天牛图像识别中,优化YOLO-v3模型的识别率为92.1%,比第2高的Faster-RCNN模型多出1.9个百分点。而在蝽象和叶蝉的图像识别中,优化YOLO-v3模型的识别率为89.8%和88.3%。模型的虫害综合识别精度如表2所示。

表2 4种算法模型的综合识别精度和识别速度情况
由表2可知,在综合识别精度上,最高的算法模型为优化的YOLO-v3网络,其mAP为88.92%,比Faster-RCNN高3.7个百分点。而在识别速度上,速度最快的为SSD-300,速度为41帧/s,其次为传统YOLO-v3模型,速度为25帧/s。研究优化的YOLO-v3网络在速度上仅比传统YOLO-v3模型低4帧/s。试验表明:模型在对比害虫等小目标图像内,精度性能优越。因此,试验将对比不同模型在马铃薯、大白菜、梨树以及苹果树图像中的虫害检测效果,具体结果如图8所示。

图8 不同种类果蔬的虫害识别精度情况
从图8中可以看出,在马铃薯虫害的图像识别中,优化YOLO-v3模型的识别精度为88.91%。在大白菜虫害的图像识别中,优化YOLO-v3模型的识别精度为86.27%。在梨树虫害的图像识别中,优化YOLO-v3模型的识别精度为88.91%。在苹果树虫害的图像识别中,优化YOLO-v3模型的识别精度为85.21%。在果蔬植物图像背景的影响下,模型的综合识别精度如表3所示。

表3 4种算法模型的综合识别精度和识别速度情况
由表3可知,在综合识别精度上,最高的算法模型为优化的YOLO-v3网络,其mAP为87.32%,比传统YOLO-v3模型高4.4个百分点。而在识别速度上,速度最快的为SSD-300,速度为26帧/s,其次为研究构建的优化YOLO-v3模型,速度为17帧/s。试验表明:模型在对比果蔬植物背景的虫害目标检测中,精度、性能保持稳定。最后,试验随机从测试数据集中抽取50个样本,测试模型的识别精度,具体见图9。

图9 优化YOLO-v3模型的识别测试
图9中纵轴的1~5分别表示菜青虫、叶蝉、桑天牛、蝽象、飞蛾5种害虫种类。从折线图可以得知,本次50份样本测试中,识别正确的样本共计45份,识别准确率为90%。
4 结论
出于确定模型参数并验证模型性能的目的,研究在构建了虫害图像数据集后,经过仿真训练和不同参数结果的测试试验,确定了EPP参数为80%的同时,也验证了非整体标注图像处理方法的有效性。以害虫种类和果蔬图像背景为区分,研究进行了2次模型的识别精度和检测速度对比。在害虫种类识别的训练中,优化的YOLO-v3网络mAP为88.92%,比Faster-RCNN高3.7个百分点。而在果蔬图像背景测试中,优化的YOLO-v3网络mAP为87.32%,比传统YOLO-v3模型高4.4个百分点。试验表明:在不同的图像目标分类中,研究构建的YOLO-v3模型比Faster-RCNN和传统YOLO-v3网络精度更高,测试性能更稳定。本次试验的不足之处在于2次测试试验的数据来源单一,缺乏实际数据样本进行对比,模型的实际应用效果有待进一步确定。