基于应用场景的智能家电功效测评研究
——以智能扫地机器人为例
2022-02-07夏建军李岳洪陈启彩
邢 军 夏建军 李岳洪 陈启彩
(威凯检测技术有限公司 广州 510663)
引言
智能化技术应用到家电产品中后,拓展了家电产品的功能,使其赋予智能,成为“智能家电”。智能家电与传统家电的不同就在于它需要与用户及环境有更多的交互,有着更丰富、复杂的应用场景,更加注重用户体验。良好的用户体验对智能家电融入用户生活有着重要意义,这也逐渐成为智能家电成为市场核心竞争力的关注点。智能家电因采用了人工智能技术,甚至具有自主学习用户生活习惯和特点的能力,并通过场景应用自主实现全方位的联动,以达到产品功能用途目的。智能家电的最大亮点在于很大程度上替代了用户体力劳动,极大地降低了对人工的依赖程度。以洗衣机产品为例,传统洗衣机需要用户根据衣物情况,手动投放洗衣液等衣物洗护剂,并且人工判断选择洗衣模式;而智能洗衣机则可以对衣物进行感知识别,获取衣物数量、类型甚至材质等信息,借助人工智能技术,精准控制投放的水量、洗涤剂量,并自主综合选择最佳洗衣模式,通过利用人工智能技术和算法代替了人工判断、操作,从而提升了用户使用的便捷性和舒适性。
市场上一些所谓的“智能家电”产品不一定真正“智能”,反而可能在实际应用场景中,不但没有给用户带来良好的用户体验,反而影响了产品本身功能实现的效果。目前智能家电标准化体系尚未完全建立,面对复杂的应用场景和用户个性化的偏好需求,更需要从具体产品的应用场景和用户体验角度出发,对智能家电产品的智能化进行测评。本文作者结合智能家电产品的应用场景,给出了产品应用场景的定义和理解,提出了一种基于应用场景的智能家电测评方法,并以智能扫地机器人产品作为典型案例,旨在为智能家电功能性能测评标准化提供一些建议和参考。
1 智能家电场景化分级测评思路
1.1 人工智能与应用场景
据南方都市报报道,2022年8月世界机器人大会主论坛会上,中国科学院院士张钹提到,人工智能是用机器来模仿人类的智能行为,追求的是机器行为与人类行为的相似性,甚至是越相似越好;人工智能让大家以为人工智能做智能的,但实际上人工智能只能在模仿智能行为,即智能的外部表现,并非在模仿智能。随着人工智能技术在智能电器产品设计、生产、使用等领域的应用,出现了众多的智能应用场景。
场景可以理解为是人与物质空间、信息空间等环境要素的连接、匹配及组合,进而实现“人-法-环境”互动交流的场域,环境与人是场景的两大构成要素。而应用场景,是指一个应用被使用、执行时,“最可能的”所处场景,基本组成要素包括环境(如时间、空间)、人(用户或消费者)以及法(实现应用的技术)。智能应用场景就是人工智能这个“应用”被使用、执行时所处的场景,这种场景具有交互性,是一种动态调整的应用场景,可以通过对具体产品或系统与用户之间的交流,最终让人的需求得到满足[1]。本文作者结合家电产品,给出“产品应用场景”的定义和解析。产品应用场景,即相关元素及这些元素间的相互影响构成的集合。这些元素包括:为实现产品全部或部分用途的各项功能的外在表现,以及影响这些功能外在表现的所有因素;各项功能的外在表现与因素的互相影响及影响规则。这些功能的外在表现与各因素的互相影响及影响规则最终导致产品全部或部分实现用途的优劣结果。
1.2 智能家电应用场景
智能家电应用场景,顾名思义,即具有智能化技术或智能化功能的家用电器及其智能化“应用”被使用、执行时所处的家居场景。根据具体智能家电产品类别和使用场所,其所处的家居场景可以细分为客厅场景、厨房场景、卧室场景、卫浴场景及阳台场景等,围绕智能家电应用场景构成的三要素“人、法、环”,从“智能化能力(感知、决策、执行、学习等)”和“智能化功能实现效果(智能功效)”的角度,测评智能家电产品的功能和性能水平。
以扫地机器人产品为例,不同消费者购买扫地机器人后,产品使用的家居应用场景元素是不一样的,例如客厅、餐厅、卧室、衣帽间的家具和布局风格,卧室与客厅、客厅与厨房的门槛形状和高度,桌子、椅子、沙发、衣柜、电视柜和床铺等等。这也就导致了不同的应用场景对扫地机器人的性能和智能化要求也不一样。图1给出了家居常见的应用场景元素。

图1 扫地机器人家居场景元素示意图
例如,扫地机器人在墙角、沙发及电视柜底部、桌子、椅凳等区域的清扫性能大打折扣,扫地机器人无法越过门槛导致某一区域出现漏扫,扫地机器人在较高的台阶边缘出现跌落可能导致机器损坏,扫地机器人可能会钻到较低的沙发底、柜子底下卡壳而无法脱困,扫地机器人也有可能因为无法成功返回充电座充电后继续清扫,或者建图不完整,导致出现大面积漏扫问题,对于家中的拖鞋和袜子等特殊物体,如果扫地机器人无法准确识别,就有可能将这些物体送往一个“陌生之地”,给用户带来寻找东西的烦恼。此外,扫地机器人对于茶渍、酱油、宠物粪便等污渍难以清扫,甚至会导致二次污染等用户痛点问题。
1.3 测评思路
智能家电之所以能够“智能”,是能够替代人类自主进行某项动作或者完成特定任务活动,其替代人类完成任务活动的多少直接决定产品的智能水平如何。因此需考虑结合产品真实的应用场景,设定不同等级的场景测试环境,通过产品智能功能外在表现能力,对其智能功效进行分级测评。
目前针对智能家电产品的测评,更多的关注产品功能实现的单一性能指标,忽略了产品按实际场景使用时所体现出来的功能综合效果,这可能会导致测评结果不一定能够表征产品在用户使用过程中的真实效果。为此,依据产品使用场景和用户体验进行测评。
2 扫地机器人智能分级测评方法研究
2.1 智能分级测评核心指标
针对不同的家庭应用场景,市场上宣称“智能”的扫地机器人,其智能化功能效果是否达到了消费者的使用期望,目前行业内还缺少统一的测试与测评方法。
智能导航、智能行走、智能清洁作为扫地机器人在复杂和未知环境中实现路径规划和自主清洁的智能化功能效果主要表现参数,具体可以量化为覆盖率和清洁能力测评方面。其中覆盖率作为扫地机器人智能导航和智能行走的量化测评关键指标,是扫地机器人智能化功效水平的首要体现。现行QB/T 4833-2015行业标准中将“覆盖率”定义为机器人在规定区域和时间内其清洁头运行所覆盖的面积与规定区域面积的比例。
2.2 现有标准测评方法的局限性
目前,国内外对扫地机器人覆盖率的测试方法,都是依据IEC 62929:2014国际标准、GB/T 34454-2017国家标准及QB/T 4833-2015行业标准规定的20 m2单房间区域布局的测试环境。由于测试场景元素比较单一,未考虑到用户实际家庭环境建筑规模及多房间区域场景元素情况,比如餐厅区、厨房区、玄关区等场景环境。因此,现有测试方法的测评结果往往与实际使用情况相差甚远,扫地机器人的智能化水平难以体现和测评。
2.3 测评目的与需求
针对不同消费者家庭环境,给出符合实际境况相应等级的测试场景,对扫地机器人实现的智能功能效果做出合适的智能化水平等级测评结果,一方面可以为企业产品研发端,提供技术支撑和质量技术服务方案,提升产品质量和技术水平;另一方面可以为市场和用户端,致力于解决消费者在选购时遇到的实际痛点,引导消费者选购适合自己的智能产品。
2.4 测评方法案例设计示例
本文笔者所在单位技术团队经过充分的市场调研、企业走访、方案设计与技术论证,结合我国绝大多数家庭建筑面积实际情况,模拟搭建了中国家庭典型的三房两厅家居应用场景平台,并基于该平台研制了一种基于用户不同应用场景下的扫地机器人智能化水平分级测评方法及其测评系统,具体包括不同等级测试场景平台构建、智能化指标测评方法确定、智能等级划分依据及测试系统的实现。如图2所示,本方法的基本思路是:根据扫地机器人应用场景的复杂程度和技术要求水平,应用场景等级分为:1级、2级、3级、4级和5级;智能化测评指标是围绕扫地机器人的智能导航、智能行走、智能清洁等关键核心测评指标体系,智能化水平等级划分依据扫地机器人所处的应用场景等级(1级~5级),通过智能导航、智能行走和智能清洁等功能自主完成清洁任务的能力进行等级划分,分为S1、S2、S3、S4和S5共5个等级,然后通过扫地机器人是否能够通过对应等级的应用场景测试, 综合评判其智能化水平。扫地机器人在越高级别的应用场景下自主完成清洁任务,代表扫地机器人的智能化水平等级越高,所体现的智能化功能效果越好。
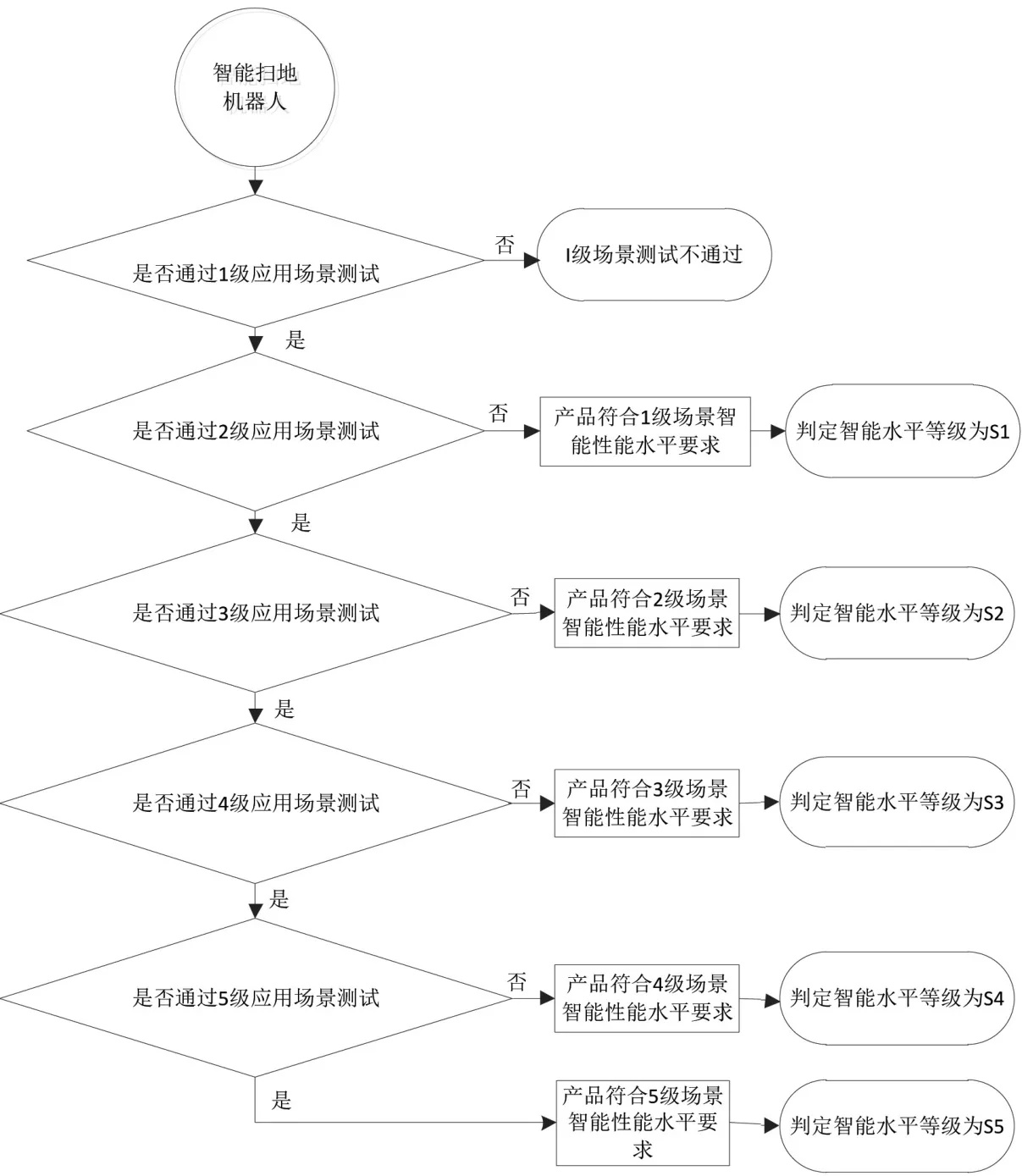
图2 分级测评基本流程
本文笔者所在项目工作组经过大量实验数据测试验证,并联合行业内相关企业共同起草制定了《家用和类似用途扫地机器人智能分级测评规范》团体标准。该标准的制定,填补了基于应用场景的智能家电产品智能化水平分级测评标准的空白,通过模拟中国典型的三房两厅家居应用场景布局,较全面、客观、定量的综合考核扫地机器人越障、避障、脱困、清洁、全屋覆盖等能力,测试测评结果更加贴近实际使用情况,能够较充分地反映扫地机器人的综合性能和智能化水平。
2.5 测评实施案例分析
如图3所示,本方法测评实现系统主要由家居场景、硬件系统及软件功能系统组成,其中家居场景包括扫地机器人的可清洁覆盖区域和家具障碍物区域,由客厅、餐厅、卧室、书房、厨房、卫生间、玄关、衣帽间等区域组成,不同区域按照实际家居布局设置有模拟沙发、餐桌、椅凳、茶几、电视柜、床、床头柜、衣柜、落地灯、电线、窗帘、书桌、橱柜、推拉门槛、移门滑轨等多种障碍物;硬件系统包括计算机监控系统、图像采集系统及位置跟踪系统,通过软件功能设计,实现用于作为扫地机器人测试过程中的测试场景环境地图构建、实时位置跟踪、世界位置标定、数据采集、位置轨迹分析和覆盖率计算、数据报告管理等功能。本测试系统采样率不低于30帧/s,位置测试准确度小于10 mm,时间测量准确度小于0.02 s,满足当前家用移动机器人产品移动能力测量参数要求。
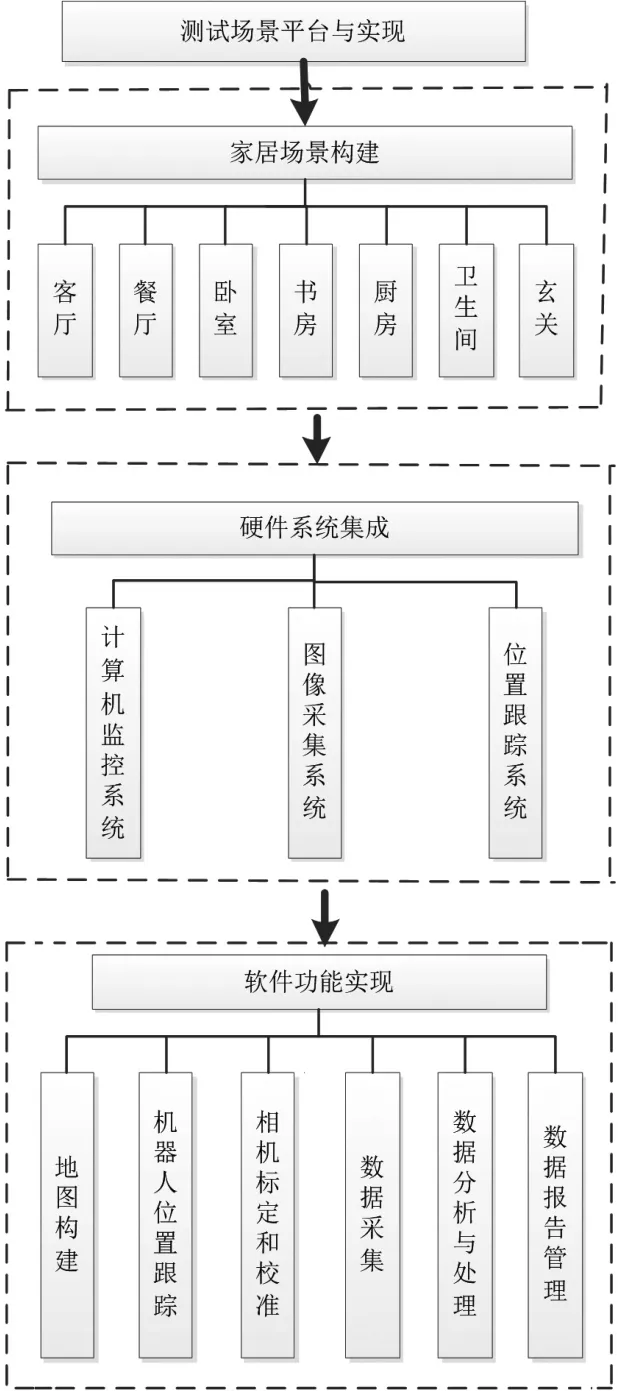
图3 测评系统实施框图
以某一品牌型号扫地机器人产品测试为例,测试前保证扫地机器人充满电,在规定的测试应用场景内进行试验,试验应持续运行至说明书定义的清洁工作完成为止。具体清洁工作完成判定依据包括扫地机器人出现指示清洁周期结束的信号(声音信号或光信号等)或在地板上停止动作超过3 min。另外,如果扫地机器人因为清洁工作完成而停止运行,则结束试验;如果扫地机器人因清洁工作完成以外的任何原因停止运行,如卡死、死机等,则允许人为最多干预1次使其继续试验。试验分别在规定的3个起始位置进行,每个位置重复试验3次,共试验9次,试验最终的覆盖率值可以取平均值。
如图4所示,为某中高端品牌型号测试样机的单次覆盖率和多次覆盖率测试结果轨迹,从轨迹分布情况可以看出,该测试样机基本覆盖了测试场景的绝大部分能够清洁的区域,路径规划也比较有规律。由图5可知,该测试样机的最高覆盖率达到了80 %以上。

图4 某一品牌型号样机单次覆盖率和多次覆盖率测试结果轨迹图
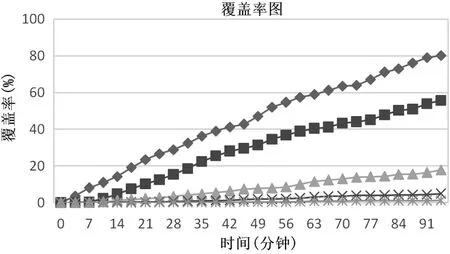
图5 扫地机器人重复性路径(1-5次)覆盖率
又如图6所示,为某中低端两个品牌型号的扫地机器人覆盖率测试结果轨迹,从轨迹分布情况可以看出,该两款样机在测试过程中均出现了漏扫情况,而且其中一款样机不仅出现了大面积区域漏扫,导致覆盖率值非常低,路径规划也比较杂乱无章。这表明了本方法的合理性,能够较客观地体现扫地机器人的智能化水平。
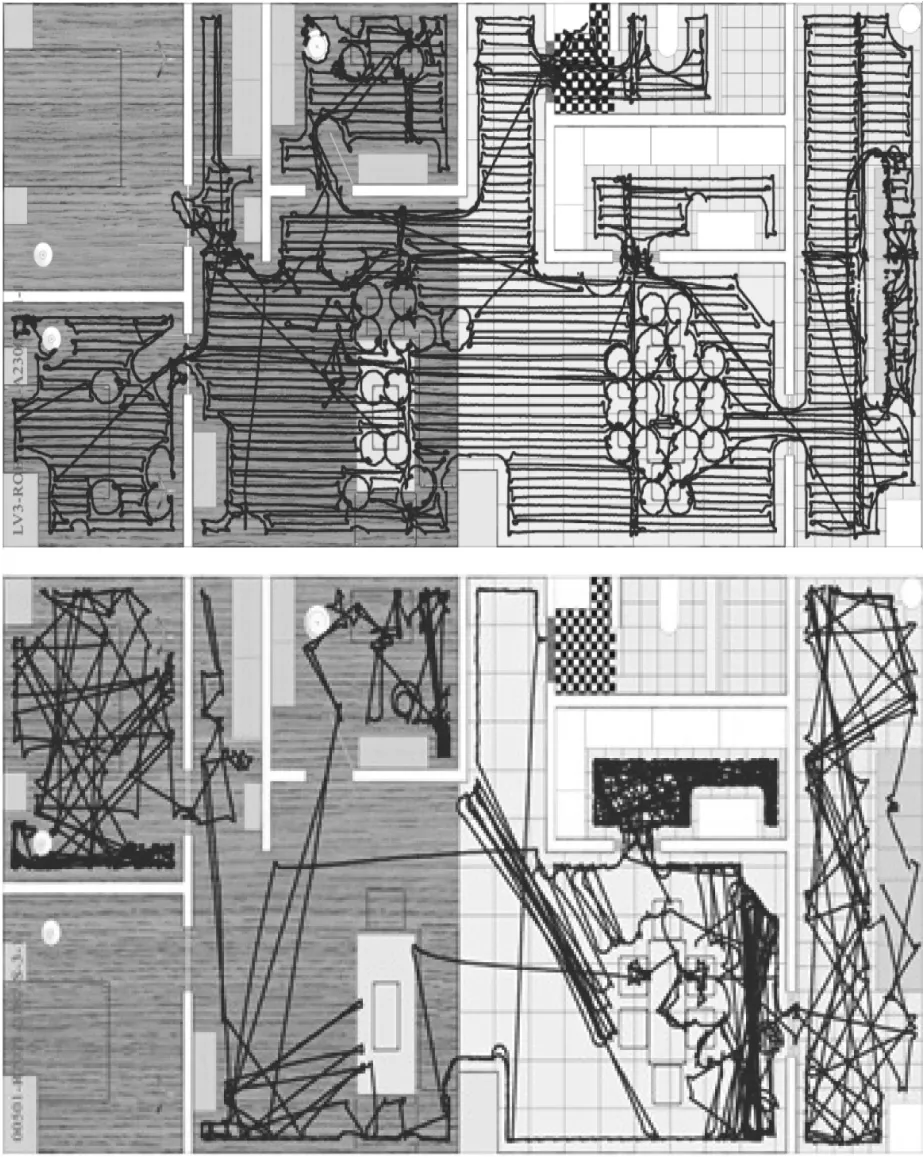
图6 其他两个品牌型号样机测试结果轨迹图
2.6 测评方法创新性及现实意义
本方法从用户实际应用场景角度出发,提供了一套典型的家居应用场景的智能扫地机器人的测试、智能等级测评方法,综合考核智能扫地机器人的智能导航、智能行走、智能清洁的能力,用于测评智能扫地机器人的智能功效。具有以下创新性及现实意义:
1)填补了从用户实际使用场景角度下扫地机器人智能功效测评方法的空白,可以引导消费者购买符合自己需求的智能扫地机器人产品。
2)考虑到了用户的实际家居多区域场景情况,通过一个测试用的应用场景就可以比较全面、客观、定量的综合考核智能扫地机器人包含越障、避障、脱困、爬坡、防跌落等移动性能和全屋覆盖能力,测评结果更加贴近实际情况,能够较充分地反映扫地机器人的综合性能水平。
3)不仅能为第三方实验室人员提供智能扫地机器人运行轨迹和覆盖率情况测试测评结果依据和手段,而且也能为企业研发人员有关智能扫地机器人的动态规划路径算法的优化与改进提供解决思路。
3 结论
本文提出了一种基于应用场景的智能家电智能化功效分级测评标准方法和思路,并以研究扫地机器人的智能功效分级测评方法为具体案例,分析扫地机器人在应用场景下的功能的外在表现与其智能化技术的关系,通过科学的技术模拟,形成可测量、可追溯的测评指标参数,并通过测评指标参数与扫地机器人智能功能效果之间关联性,建立测试应用场景,形成智能功效分级测评方法。本文案例为后续开展基于应用场景的智能家电测评标准技术研究提供了新思路。
