基于ZYNQ的DOA估计算法硬件架构设计
2022-02-06陈思宏
陈思宏
(广东博智林机器人有限公司,广东 广州 510006)
0 引 言
车载毫米波雷达为了实现目标物体的检测和定位,需要探测目标的方位信息。为了实现角度估计,通常采用多输入多输出(Multiple Input Multiple Output,MIMO)技术,结合超分辨率波达方向(Direction Of Arrival,DOA)估计算法,能最大程度上提升其角度分辨率[1]。
针对超分辨率DOA估计算法,实际应用中大多采用数字信号处理(Digital Signal Processing,DSP)芯片或现场可编程门阵列(Field Programmable Gate Array,FPGA)芯片来实现二维或更高维的DOA估计。DSP的关键优势在于对新型算法和复杂算法的开发时间更短,能够灵活运行多种算法,但实时性稍显不足。FPGA具有算法并行处理、运行速度更快等优点,但存在开发时间长、算法实现不够灵活等问题。
针对实时性要求高且工程实现复杂的DOA估计,提出了一种基于ZYNQ实现DOA估计算法的硬件架构。通过分解常用的DOA算法步骤,将大规模的滤波、乘累加、矩阵运算等重复性工作使用可编程逻辑(Progarmmable Logic,PL)进行实现,减少了DOA计算核心部分的FPGA开发量。针对快速开发且有迭代需求的算法部分,在处理系统(Processing System,PS)端进行实现[2-5]。
1 系统架构概述
基于典型的2发4收(以下简称为2T4R)时分 复 用(Time Division Multiplexing,TDM)MIMO 天线阵列和ZYNQ芯片进行硬件系统设计,进而设计DOA算法架构。硬件系统结构如图1所示。

图1 硬件系统架构
1.1 典型的MIMO天线阵列
典型均匀线阵2T4R TDM-MIMO雷达由2个间距为2λ的发射天线交替发射,4个间距为λ/2的接收天线同时接收回波,这样形成8个间距为λ/2的虚拟阵元。2T4R均匀线性阵列天线收发原理如图2所示。

图2 2T4R均匀线性阵列天线收发原理
将虚拟阵元1作为基准阵元,则其他阵元相对第1个阵元的位置为di(i=1,…,8),其中di=0。假设信号载波为ejwt,基准阵元接收的信号为x(t)ejwt,则其他阵元数接收到的信号为


因为信号总是变换到基带再处理,所以阵列信号可以表示为

当波长和阵列的几何结构确定时,方向矢量只与到达波的空间角θ有关。将方向矢量记为w(θ),与基准阵元位置无关。若选第1个阵元为基准,则方向矢量为

以w(θi)表示接收阵列的目标i的导向矢量,将式(2)带入式(4),则有
接收信号的协方差矩阵为

1.2 软硬件协同处理
ZYNQ平台的软硬件协同设计能力是其具有代表性的优势之一,主要由基于ARM的PS和等价于FPGA的PL组成。实际工程实现中,要充分结合PS与PL各自的优势进行合理的功能划分。本文将需要移位和加法运算的迭代操作在PL端高效实现,将需要进行浮点运算和循环运行较多的算法分配给PS端,通过C语言进行编程,最终达到扬长避短、优势互补的效果。
2 算法架构设计和实现
设计的DOA算法架构如图3所示。

图3 DOA算法架构
PL主要用于时分复用、数据预处理、矩阵运算以及空间谱搜索等,PS主要用于实现DOA估计算法。以双倍数据率(Double Data Rate,DDR)存储作为数据存储媒介,通过高级可扩展接口(Advanced eXtensible Interface,AXI) 通信。 模数转换器(Analog-to-Digital Converter,ADC)数据采集后经PL端处理,输出信号相位差粗估计结果和8×8协方差矩阵结果,通过AXI将数据存储在DDR存储器中。DOA估计算法运行前,PL端先生成导向矢量矩阵,然后从DDR中提取相位粗估计结果和协方差矩阵,实现相应的DOA估计。
DOA算法估计分为粗估计和细估计,其中协方差矩阵计算和粗估计使用PL硬件加速实现,能够确定谱峰的大致位置;在粗估计结果附近采用较小的步长(0.1°)进行细估计,从而得到准确的信号入射角。通过这种方式,可以在保证精度的前提下,大幅降低计算量。
2.1 时分复用模块
为了构建虚拟阵元,需要进行通道分离,最常用的方法就是对阵列天线发射端进行时分复用,即对2个通道交替发射波形,实现各个通道在时间上的分离。该方法的应用优势在于通道之间没有干扰,针对二维的DOA估计算法,PL端资源消耗量直接减少一半。
2.2 预处理模块
针对TDM-MIMO雷达,提出DOA估计前的预处理流程,如图4所示。

图4 预处理流程
首先,对回波信号进行模拟/数字(Analog/Digital,A/D)采样;其次,产生本振信号,对回波数据进行混频;再次,对混频后的信号进行滤波;最后,对滤波后的信号进行抽取,得到基带信号。
2.3 鉴相器模块
均匀线阵回波入射角粗估计基本原理如图5所示。

图5 均匀线阵回波入射角粗估计基本原理
为了得到时延信息,以RX1阵元为基准,分别对其余7个阵元进行鉴相,得到相位差后便得到时延信息。鉴相器设计如图6所示。
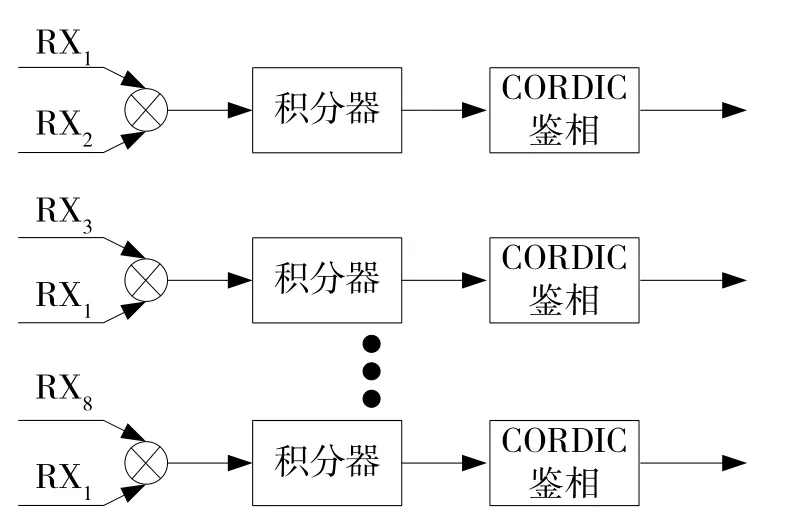
图6 鉴相器设计
积分器分别对是同相(I)支路、正交(Q)支路的数据进行积累,以抑制噪声。使用坐标旋转数字计算机(Coordinate Rotation Digital Computer,CORDIC)算法对I支路、Q支路进行求相角运算,可得到2个信号的相位差。CORDIC算法的硬件实现流程如图7所示。

图7 CORDIC算法硬件实现流程
2.4 协方差矩阵计算模块
协方差矩阵Rx经过L次快拍信号处理后可以表示为

在FPGA实现中,采用乘累加模型完成协方差矩阵运算。
2.5 导向矢量矩阵模块
无论是数字波束形成原理、多信号分类算法(Multiple Signal Classification,MUSIC) 原 理, 都 需要在整个天线的有效指向方向范围内生成1组导向矢量。在PS端通过AXI-DMA接口提取PL端得到的粗估计结果,在粗估计结果的±10°内,以步进Δθ=0.1°进行细估计。
已知d=λ/2,则导向矢量矩阵为

2.6 DOA估计模块
MUSIC算法的核心思想是将任意阵列输出数据的协方差矩阵进行特征值分解,对应不同特征值的矢量构成互相正交的信号子空间和噪声子空间,大特征值对应的特征矢量构成信号子空间,小特征值对应的特征矢量构成噪声子空间,利用2个子空间之间的正交性来进行DOA估计。
3 算法架构测试
本文设计的DOA估计算法架构使用了ARM和FPGA结合的ZYNQ SOC系统,在工程开发上结合了Verilog HDL语言、C语言和Matlab脚本等编程语言。算法架构测试验证流程如图8所示。

图8 算法架构测试验证流程
首先进行Matlab建模,并选择相应DOA估计算法,使用Matlab Coder进行脚本打包;其次使用Verilog HDL语言进行PL端代码编程,运用Vivado工具进行综合布线,并固化到XC7Z035平台;最后启动Xilinx SDK,主程序调用算法脚本,并打印粗预估、细预估结果和协方差矩阵以及DOA估计结果。
PL端时钟为工作频率为125 MHz,接收阵列采用了256个快拍数,由于设计为时分复用且采用了大量的流水线结构,从开始进行阵列数据采集到输出协方差矩阵结果,经过所有模块后需要532个时钟周期。经过测试,PL端硬件运行耗时2.128 μs左右。
在XC7Z035平台下测试DOA估计算法程序的运行时间,按MUSIC算法进行实现并配合Xilinx SDK调用,其耗时在4 ms左右。
4 结 论
针对超高分辨率的DOA估计算法进行深入研究,提出了一种基于ZYNQ的DOA估计算法硬件架构设计。该架构适用于TDM-MIMO毫米波阵列雷达,采用硬件粗估计、软件细估计的方式减少了DOA算法迭代耗时。通过大量的流水线设计,减少了常规DSP方案中大规模矩阵运算的计算量和计算耗时,从而降低了软件PS端的算法计算量和计算复杂度,在满足估计精度、满足工程应用耗时的同时,实现了算法开发灵活性和实时性之间的平衡。与其他的DOA估计算法架构相比,该方案的主要优势是支持复杂、灵活的算法且兼具实时性,保证系统运行时间满足工程应用要求,具有较高的工程应用价值。
