基于改进下垂控制的并联电流源环流抑制策略
2022-02-03曹以龙于超众吴一庆江友华
曹以龙, 于超众*, 吴一庆, 江友华
(1.上海电力大学电子与信息工程学院, 上海 201306; 2. 杭州钱江电气集团股份有限公司, 杭州 311200)
随着电力电子技术的发展,电流源在航空航天、电子检测、电力、超导等行业的应用朝着大容量的方向不断发展[1]。因此提高电流源的容量,扩大输出电流成为一个热门的研究方向,而并联是电流源扩容的一个主要途径,不仅可以降低对功率器件的要求,还能大幅减少生产设计成本[2],所以对并联电流源的研究是十分必要的。
目前,在电流源并联控制中数字锁相技术因实现简单而广泛应用,但是该方法可靠性较差,且精度不高[3]。下垂控制也可以看作一个锁相环,它不需要互连线,具有即插即用、冗余性较高、模块化等优点,因此广泛应用在逆变电源并联控制中[4-8]。而逆变器并联运行时不可避免地会产生环流。环流较大时,会威胁到逆变器的稳定运行,还可能造成输出电流畸变和并联系统损坏等严重后果[9]。对此,文献[10]使用了补偿电流的方法来抑制环流,将理想的平均电流与逆变器实际输出电流相减得到补偿电流,但是补偿电流的位置较难选定,补偿效果容易受比例-积分(proportion-integration,PI)调节器相移和滞后作用影响。文献[11]引入了一种虚拟阻抗来抑制环流,该方法环流抑制效果明显,但是虚拟阻抗的加入以及下垂特性的影响都会产生一定的电压跌落。文献[12]在引入虚拟阻抗的同时将下垂曲线设计成非线性函数,虽然可以有效减小电压跌落的影响,但参数选取较为复杂。文献[13]引入了自适应虚拟电阻,在保证供电质量的同时,有效抑制了环流,但是自适应环节的设计较为烦琐。文献[14]使用了一种动态虚拟阻抗,加入了电压补偿环节来应对线路压降,无功环流抑制效果明显,但是该策略是电压型控制,不能直接应用在电流源并联系统中。
对此,现首先分析传统下垂控制在电流源并联中的不足,采用以恒功率(PQ)控制为核心的电流控制器对下垂控制进行改进,改进后的下垂控制为电流型控制,结合虚拟阻抗和电压补偿环节的使用,提升电流控制精度的同时改善环流抑制效果。通过搭建仿真和实验平台验证改进下垂控制方法,以期取得理想的控制效果。
1 传统下垂控制原理
1.1 下垂控制
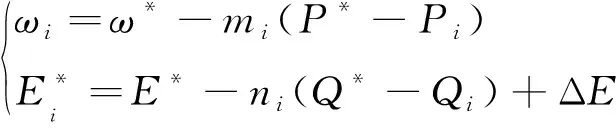
传统的下垂控制模拟同步发电机组运行特性,利用P-f、Q-V下垂特性,其中P、f为有功功率和频率,Q、V为无功功率和电压。通过控制有功功率和无功功率来调节电压的频率和幅值,从而实现逆变器输出功率的调节。传统下垂控制策略框图如图1所示。

Ii、Vi为逆变器输出电流、电压;Pi、Qi为逆变器输出有功功率、无功功率;P*、Q*为给定参考有功功率、无功功率;m、n分别为有功功率、无功功率下垂调节系数;ω*、ωi分别为给定参考角频率、系统角频率;1/s为积分环节;δi为相角;Ε*、Εi分别为参考电压幅值、输出电压幅值;Vref为输出参考电压图1 传统下垂控制策略框图Fig.1 Block diagram of traditional droop control strategy
通过对图1分析可知,无功功率Qi与电压幅值Εi构成一个下垂回路,有功功率Pi与相角δi构成一个下垂回路,由此可得下垂方程为

(1)
由图1可以看出传统下垂控制生成参考电压的过程,下垂控制器的输出电压作为电压控制回路的参考电压,其表达式为
Vref=Eisinδi
(2)
由式(2)可知,在使用传统下垂控制时,需要一个电压外环配合使用,与电流源为了得到高质量的输出电流,需要对电流直接控制形成矛盾。
1.2 并联系统环流特性分析
在并联系统中,环流计算公式可表示为

(3)
式(3)中:Ei∠δi、Ii分别为逆变器输出电压、输出电流;U0为公共母线公共连接点处电压;Zi为逆变器等效输出阻抗。
在分析时,认为两逆变器的等效输出阻抗近似相等,且呈感性,则进一步化简可得

(4)
式(4)中:j为复数虚部;Xn(n=1,2)为逆变器等效输出阻抗。
由此可以看出,若要减小环流,可以对输出电流直接控制使两逆变单元输出电流一致,也可通过控制电压幅值尽可能地趋于相等或增大输出阻抗中的感性分量。减小输出阻抗之间的差异以及增大其感抗值可以通过使用虚拟阻抗来进行解决。
2 改进下垂控制
2.1 电流双环控制器的设计
该方法使用电压型全桥逆变器控制电流的稳定输出,实现电流源的功能。通过将两个相同参数的逆变器并联来解决单个逆变器容量小的问题,对传统下垂控制进行改进,使得下垂控制器生成参考电流,实现对电流的控制更加精准。其中电流源并联系统简易结构图如图2所示。由于两个逆变器参数以及控制方法相同,对单个逆变器进行分析如下。

Udc为直流电源;L1、L2为输出滤波器电感;C为滤波电容;iL1、i0分别为逆变器侧电感电流、输出电流图2 电流源并联系统简易结构图Fig.2 Simple structure diagram of current source parallel system
采用LCL滤波器对高频信号有较好的抑制作用,且相较于L滤波器体积更小,更加适合作为输出电流滤波器。在电流双闭环中,内环采用简单的比例控制来抑制系统的扰动。外环使用了并行的准比例谐振(quasi-proportional resonance,QPR)控制器,使系统具有很大的增益以及较好的谐波抑制能力,其中电流双环控制器的设计如图3所示。
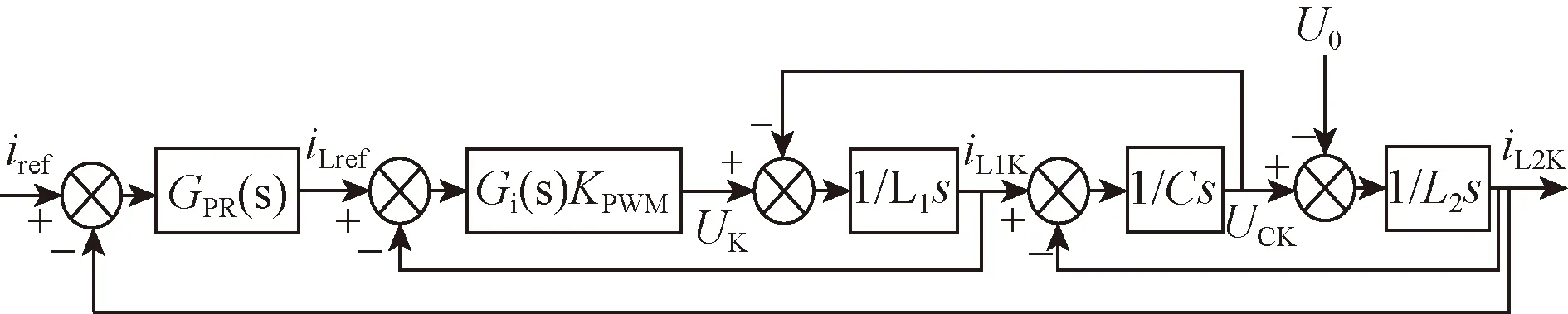
iref为输出参考电流;GPR(s)为比例谐振控制器;iLref为逆变器侧输入的参考电流;Gi(s)为电流内环的传递函数;KPWM为比例系数;UK为逆变器侧电压;s为拉氏变换;iL1K为流过电感L1的电流;UCK为电容两端电压;iL2K为流过电感L2的电流图3 电流双环控制框图Fig.3 Current double loop control block diagram
比例谐振(proportional resonance,PR)控制器在理想情况下能够对特定频率进行无静差跟踪,但是在实际工程中,频率会在所难免地发生些许偏移,这时PR控制器就无法较好地进行跟踪。由图4可知,相对于PR控制,准比例谐振(QPR)控制在谐振频率处的增益有所减小,避免了因增益无限大而引起的系统稳定性问题,同时增大了系统带宽,所以在频率发生变化时,依然具有较好的跟踪性能。如图5所示,并行的准比例谐振控制器可以对高次谐波进行抑制,进一步提高输出电能质量。
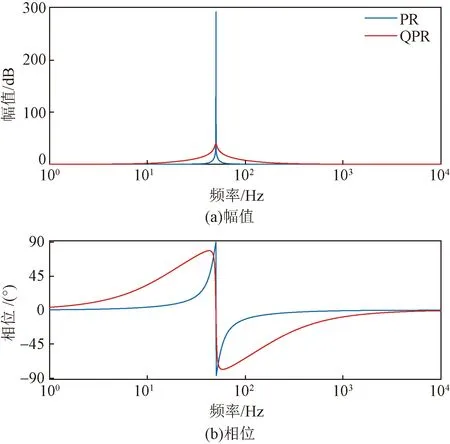
图4 准比例谐振与比例谐振控制伯德图Fig.4 Bode diagram of quasi-proportional resonance and proportional resonance control

图5 并行的准比例谐振控制器伯德图Fig.5 Bode diagram of parallel quasi-proportional resonant controller
并行的准比例谐振控制传递函数为
(5)
式(5)中:KP为比例系数;n为谐波的次数;Kin为谐振系数;ωc为调节因子。其中,KP=0.25,Kin=25,ωc=5。
由图3可得,内环电流环的传递函数为
(6)
式(6)中:K=Gi(s)KPWM;K1=L1L2。
通过分析图3可得,逆变器输出电流的闭环传递函数为
i0i=Gr(s)iref-Gu0(s)u0
(7)
其中Gr(s)、Gu0(s)可表示为
(8)

(9)
式(8)中的K、K1与式(6)相同,其余值为
2.2 改进下垂控制器设计
传统下垂控制是电压型控制,通过有功和无功对电压相位和幅值的参考量进行整定,输出参考电压。而电流源为了得到高质量的输出电流,通常采用电流双闭环对电流进行控制。所以针对电流源使用电流双环对电流直接控制与传统下垂控制输出参考电压的固有矛盾,对传统的下垂控制进行改进,利用有功功率与无功功率分别对有功电流与无功电流进行控制,在下垂控制器中合成输出参考电流,与电流环相连接,实现对电流更加精准的控制的同时有效减小了两电流源间的环流。


LPF为低通滤波器;ZV为虚拟阻抗;Kup、Kui分别为电压补偿环节的PI控制参数图6 改进下垂控制策略框图Fig.6 Block diagram of improved droop control strategy
由图6得电压合成方程为
(10)
式(10)中:ΔE为电压补偿值。
一般情况下,逆变器只需要输出有功功率就可以实现对电流的控制,即传统的P控制即能满足系统稳定性要求。设电压、电流幅值分别为U、I,则传统的有功控制方程为

(11)
采用PQ控制可以很好地与下垂控制相结合,其基本思想是,通过有功、无功分别对有功电流、无功电流进行控制,这样就能很好地将功率控制转化为电流控制,在一定情况下还可以起到一定的无功补偿作用。设有功电流与无功电流的幅值分别为Ia、Ir,参考电流合成公式为

(12)
设I为参考电流幅值,根据有功电流与无功电流的关系可求得
(13)
最后生成参考电流为
iref=Isinθ
(14)
式中:θ、E分别为来自添加虚拟阻抗后母线电压的相角与幅值;P*、Q*分别为给定的有功功率、无功功率。
分析图6可知,下垂控制有功回路加入的积分环节可以有效减小并联系统中各逆变器之间的相角误差,因此并联系统中各逆变单元之间的相角差很小,能够精准地稳定在给定频率点,所以有功回路一般不会产生环流。而无功功率控制回路没有添加积分项,无法较好地跟踪额定参考量,所以逆变器极易产生无功环流。
2.3 虚拟阻抗设计
针对逆变电源并联时出现的环流问题,工程中经常使用虚拟阻抗来解决。使用纯感性的虚拟阻抗来减弱阻抗中阻性成分的影响,从而减小功率之间的耦合,实现对无功环流更加精准的抑制,但虚拟阻抗的取值不是任意的,取值过大会降低输出电能质量,取值过小往往达不到环流抑制的目的。
由于滤波环节的感性分量很大,因此可以认为Zi≈Xi,由并联结构可得
(15)
由式(15)可得,通过调节等效输出阻抗的值就可以调节无功功率的大小,在选用纯感性的虚拟阻抗ZV(s)=sL,不改变电流双闭环相关参数的情况下,逆变器1与逆变器2的无功功率之比为
Q1/Q2=(U0-E1)X2/[(U0-E2)X1]
(16)
一般情况下,认为(U0-E1)/(U0-E2)影响很小,故忽略此项得
Q1/Q2≈X2/X1
(17)
令

(18)
则由式(18)可得KY=1/KX,由此可以看出,两逆变器的无功功率Q1与Q2的比值为KY,X1与X2的比值为KX,KX与KY成反比关系。如图7所示,添加虚拟阻抗之后,在A点(KX,1/KX)能够满足无功功率分配的要求,距离A点偏差越大,等效输出阻抗差异越大,所产生的无功环流就越大。经实验验证,KX=KY=1,虚拟阻抗取1 mH时,无功功率能够有效均分,且均流效果较好。

图7 Q1/Q2与X1/X2的关系曲线Fig.7 Relationship between Q1/Q2 and X1/X2
引入虚拟阻抗后母线电压为

(19)
2.4 电压补偿环节设计
虚拟阻抗的加入会产生一定的电压降落。由下垂控制特性可知,下垂方程通过下垂系数对参考量的相位和幅值进行调整,若是减小下垂系数,在一定程度上可以减小电压跌落,但是会影响输出电能质量,甚至影响系统的稳定性。所以为了得到更加精确的参考电流,在无功控制回路中引入了电压补偿。通过对母线电压进行补偿,从而得到更加精准的电流输出。电压恢复的表达式为

(20)
式(20)中:U0为传感器采集到的公共母线电压的实际值;E*为额定电压;Kup和Kui分别为电压补偿控制的PI参数,其中Kup=10,Kui=100。图8为电压补偿原理图。

图8 电压补偿原理图Fig.8 Schematic diagram of voltage compensation
并联系统的各个逆变器使用相同的控制策略。综上所述,图9为单电流源控制结构框图,添加虚拟阻抗和电压补偿环节之后,下垂控制器输出参考电流iref,结合电流双闭环控制,实现稳定的电流输出,达到了较好的均流效果。
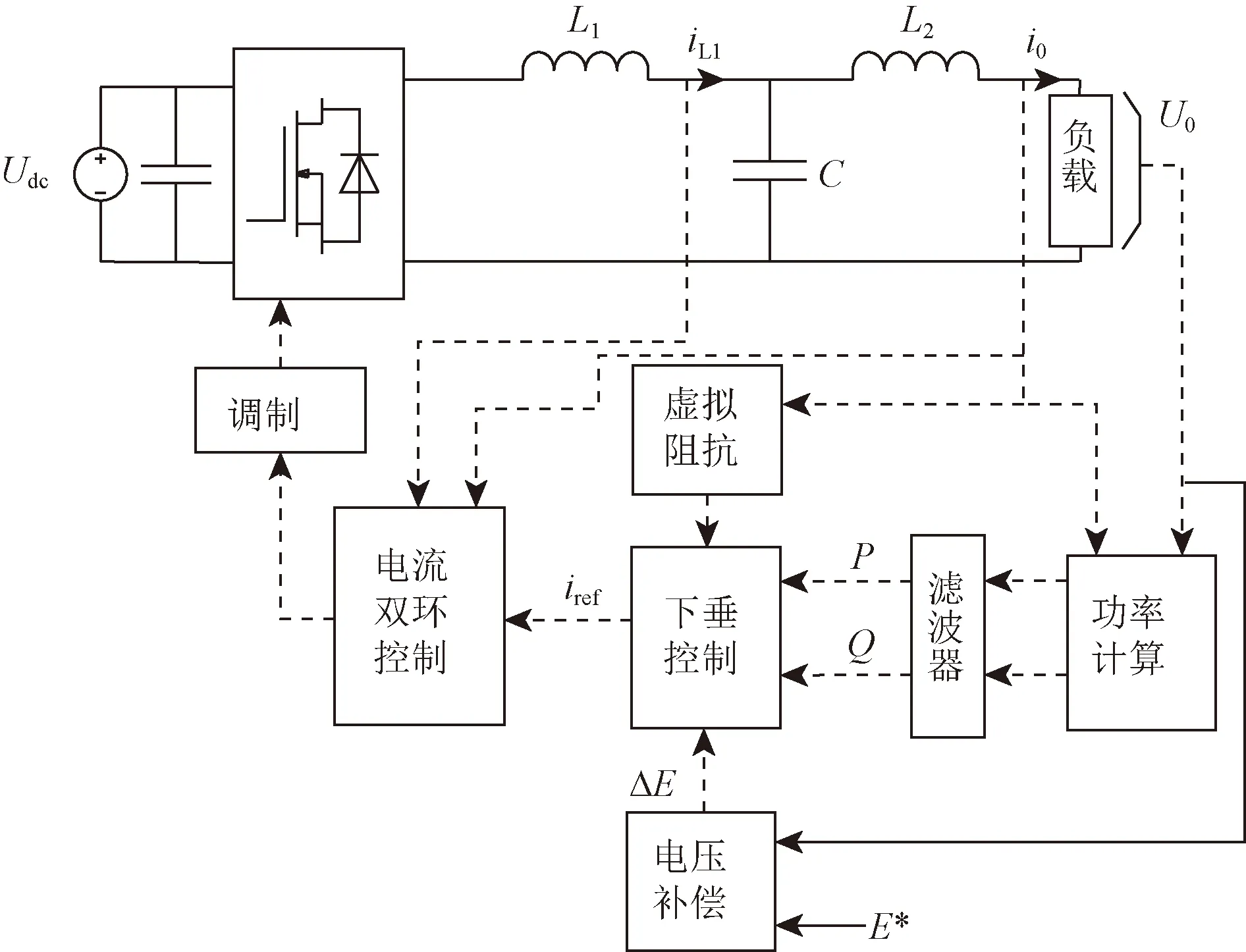
图9 单电流源控制结构图Fig.9 Single current source control structure diagram
3 仿真与实物分析
3.1 仿真结果
为了证明所提控制策略的有效性,在MATLAB/Simulink中搭建如图2所示的两个电流源并联的仿真模型,其中单个电流源的控制结构如图9所示。并联逆变器主要参数为:直流输入400 V,系统总输出电流40 A/50 Hz,滤波电感L1=1 mH,滤波电容C=10 μF,滤波电感L2=0.5 mH,下垂系数分别为:m=2×10-4、n=2×10-3,仿真波形如图10~图12所示。
图10(a)、图10(b)分别为未加虚拟阻抗传统下垂控制以及改进下垂控制的电流源输出电流波形,图11(a)、图11(b)分别为未加虚拟阻抗传统下垂控制以及改进下垂控制的两逆变器间环流,图12(a)、图12(b)分别为逆变器并联系统输出总电流总谐波失真(total harmonic distortion,THD)。

图10 两个电流源输出电流和并联系统输出总电流Fig.10 Output current of two current sources and total output current of parallel system
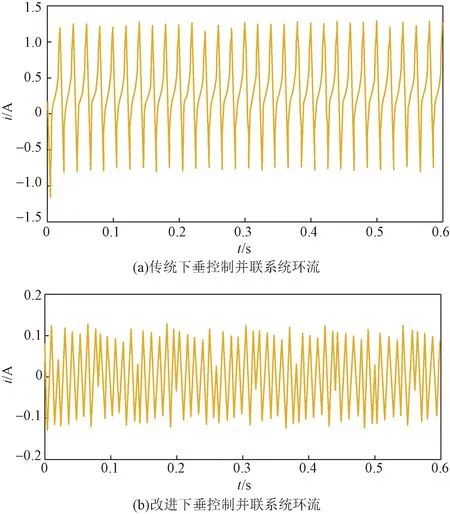
图11 并联电流源之间的环流放大Fig.11 Circulation amplification between parallel current sources
由图10(a)、图10(b)可以看出所提出的改进下垂控制策略相较于传统下垂控制策略能够有效保证两逆变器输出电流的幅值和相位保持一致,实现输出电流同步,达到了并联扩容的目的。由图11(a)、图11(b)对比可知,采用传统下垂控制所产生的环流最大值约为1.3 A,采用改进下垂控制所产生的环流约为0.1 A,改进下垂控制抑制环流效果更为明显。由图12(a)、图12(b)对比可得,采用所提策略,系统输出总电流的THD为1.10%,相比传统方法的2.21%,THD较小,输出电流质量较好。
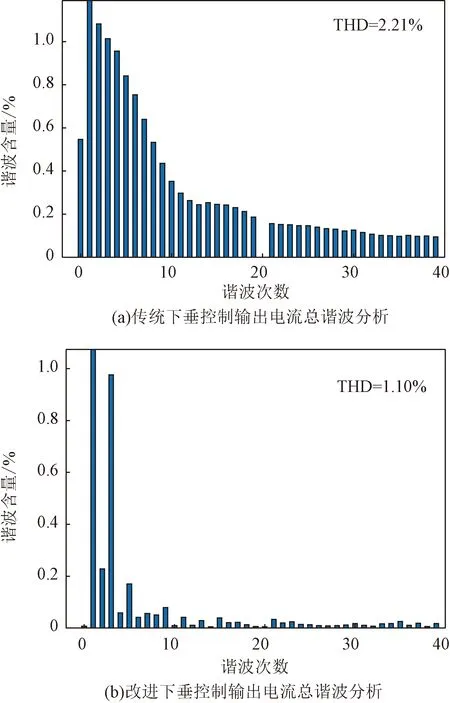
图12 并联系统输出总电流谐波分析Fig.12 Harmonic analysis of total output current of parallel system
3.2 实验结果
为了验证仿真的正确性,搭建了两台H全桥逆变器实验平台进行实验验证,直流输入为70 V,输出电流为5 A,L1=1 mH,C=10 μF,L2=0.5 mH,负载功率为500 W。控制和采样系统使用DSP2812控制芯片完成,开关/控制频率20 kHz。图13为电流源并联实验平台。测试所提控制策略的实验波形如下。

图13 电流源并联系统实验平台Fig.13 Experimental platform of parallel current source system
图14(a)、图14(b)分别为未使用虚拟阻抗的传统下垂控制以及改进下垂控制中各电流源间环流、输出电流波形,图15(a)、图15(b)分别为电流指令突变时,传统下垂控制以及所提改进下垂控制策略中实验波形。图16(a)、图16(b)分别为负载突增、减时系统输出电压、电流实验波形。
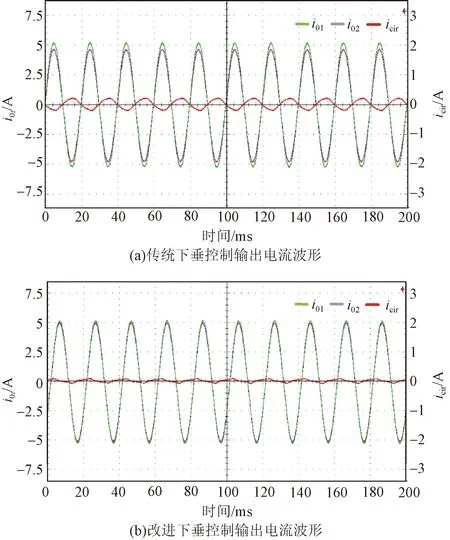
图14 两台电流源间环流以及输出电流波形Fig.14 Circulating current between two current sources and output current waveform

图15 电流指令突变实验波形Fig.15 Experimental waveform of current command mutation

图16 负载突变实验波形Fig.16 Experimental waveform of load mutation
实验结果表明,采用电流源并联的改进下垂控制策略后的环流为0.08 A,相较于传统下垂控制下的0.3 A,环流明显减小。两电流源的输出电流基本重合,无明显相位差,系统均流效果较好。电流指令突变时,能够快速跟踪到指令值,相较于传统下垂控制,改进后环流抑制效果更为明显。负载突变时,电流无明显波动,电压能够在1/4个周期内迅速恢复稳定,并联系统具有良好的动态响应性能。验证了基于改进下垂控制的并联电流源控制策略的有效性。
4 结论
针对传统下垂控制器输出参考电压,无法较好地应用在电流源电流控制中的问题,提出了一种对电流进行跟踪的改进下垂控制方法,通过仿真与实验,可得结论如下。
(1) 改进下垂控制器输出的参考电流直接作用于电流双环,与传统的电压电流双环相比,省去了电压外环。使用并行的准比例谐振控制,提升了输出电能质量,实现了对电流更加精准的控制。
(2) 使用虚拟阻抗以及电压补偿,提高环流抑制能力的同时,保证了输出电压稳定,提升了电流控制精度。
(3) 针对电流源并联的改进下垂控制方法均流效果较好,为更多台、更大功率的电流源并联提供了一定的理论支撑和参考价值。
