湿喷机械臂自动化作业技术及仿真实验分析
2022-02-01王春
王 春
(钟山职业技术学院,江苏 南京 210049)
湿喷作业是在隧道爆破结束后,使用设备向隧道避免喷射混凝土,从而起到支撑、加固避免的效果。在我国制造业向高端转型的背景下,建筑市场上出现了许多自动化、智能化的施工设备。在隧道施工中,湿喷机械臂可根据预设的运行轨迹和设定好的喷射参数,自动完成隧道壁面的补坑、填充、扫面等作业任务。湿喷机械臂自动化作业技术的应用,不仅显著提高了隧道湿喷作业效率,减轻了一线施工人员的压力,而且还能保证喷射混凝土与隧道岩面紧密贴合,提高喷射质量。在湿喷机械臂自动化作业中,隧道三维信息的获取、湿喷机械臂轨迹规划、喷射方量和喷射角度等参数的设计等,都是决定该技术应用效果的关键点。
1 湿喷机械臂自动化作业技术
1.1 补坑作业技术
隧道爆破后,在隧道壁上会形成若干不同深度的坑,自动化湿喷作业的第一步就是要将这些深坑填平,这样在下一步的湿喷作业中才能保证喷层与岩面能够充分贴合,保证湿喷作业质量满足施工要求。基于湿喷机械臂自动化技术的补坑作业,首先通过三维扫描的方式,获取隧道壁面的点云数据,并通过对点云数据的进一步处理,将爆破轮廓与设计轮廓展开对比分析。通过生长三棱台的高度辨别处深坑的位置坐标和体积信息[1]。在此基础上,依靠深坑位姿信息规划湿喷机械臂的移动路径,并燮制湿喷机械臂的末端喷枪到达指定的补坑点。同时,再根据深坑的体积信息确定喷浆方量、喷浆时间,参数设计完毕后开始喷浆补坑。在补坑结束后,使用三维激光扫描仪对隧道壁面再次扫描,根据扫描结果判断补坑作业质量。如果扫描结果显示还有深坑未被填充,则根据该深坑的位姿信息,重新燮制机械臂移动到该位置,重复上述湿喷步骤,直到所有的深坑被填平。基于自动化湿喷技术的补坑作业流程见图1。

图1 补坑作业流程
1.2 填充作业技术
该步骤的主要任务是对基底层和拱架层进行喷浆填充。由于这2 层的喷射面积大、喷浆方量多,对最终的湿喷作业质量影响最为明显,因此也是需要重点关注的技术要点。在湿喷机械臂自动化填充作业中,选择分区、分块多次薄喷的作业模式。所谓分区,就是将整个隧道按照自上而下、从左往右的顺序,划分成若干个喷射区。这样分区的作用是保持钢拱架左右两侧的受力均衡,避免湿喷作业过程中钢拱架因为单侧受力太大而发生变形问题。把每个喷射区再划分成若干个面积相同的矩形喷射块,将喷射块的中心点作为喷射点,规划好移动路径后将喷枪移动至喷射点处,完成均匀喷射。基于自动化湿喷技术的填充作业流程见图2。

图2 填充作业流程
由于填充作业使用的混凝土方量较大,因此为了避免喷射的混凝土在隧道壁面上出现流挂、掉块问题,在实际喷射作业时必须做到多次薄喷,要求单次喷射混凝土的平均厚度小于10 cm。
1.3 扫面作业技术
扫面作业是在填充作业基础上,于两榀拱架之间再喷射一层混凝土并形成表面层。由于隧道岩壁表面层对平整度、均匀性均有着较高的要求,因此在使用湿喷机械臂进行自动扫面作业时,一方面需要保证机器人做横向匀速运动,另一方面还要保证喷头上下刷动,其运动轨迹为“弓”字形。湿喷机械臂喷头的刷动范围(L)的计算公式为:

式中:d 表示喷头与扫面作业面之间的喷射距离,单位为m;θ 表示喷头在扫面作业面上下刷动角度,单位为°。喷头匀速移动速度(V)的计算公式为:

式中:S 表示混凝土的喷射方量,单位为m3/h;α 表示喷浆回弹率,单位为%;H 为扫面层厚度,单位为m。
按照上述计算公式分别求得喷头的L值和V 值后,根据L将隧道设计点云沿周向进行均匀分割。在利用分割后得到的点云数据,获得“弓”字形拐点的位姿信息。然后利用直线将各个拐点连接起来,即可得到湿喷机械臂的运行轨迹。最后按照该运行轨迹进行扫面作业,整个流程见图3。

图3 扫面作业流程
2 湿喷机械臂作业轨迹规划
2.1 绘制隧道轮廓
为了方便规划湿喷机械臂的作业轨迹,本研究将隧道参数化为可展曲面。这种结构的特点是曲面上每个点的高斯曲率均为0,这也就意味着三维的可展曲面,在展开成为二维平面时不会出现失真的情况。在湿喷机械臂的轨迹规划中,将二维平面的运动轨迹转换到三维空间,可以保证湿喷机械臂的运动距离和运动速度不变,从而减轻了轨迹规划的工作量[2]。在确定了隧道结构后,本研究使用参数多项式描述隧道断面轮廓线,使隧道轮廓线的(y,z)坐标相对于u 参数化,利用关于u 的参数多项式拟合隧道轮廓。分别选择1~4 阶参数多项式拟合y,z坐标的均方误差,拟合结果表明使用3 次多项式拟合y坐标、4 次多项式拟合z坐标,误差最小。基于此,分别用u,v坐标描述隧道锻炼轮廓线的参数方程:

式中:系数a0-3和b0-4均由隧道断面轮廓线尺寸确定。
2.2 平面湿喷作业规划
正常情况下,湿喷机械臂完成一个完整的湿喷作业循环,至少需要补坑、填充、扫面3 道工序[3]。在这些工序中,补坑作业要求准确识别坑的具体位置,在此基础上决定湿喷机械臂的动作。由于坑的位置有较强的随机性,这里不做讨论;而填充和扫面两道工序的喷射策略基本一致,因此本研究以填充作业为例,简要概述平面作业轨迹绘制方法。
填充作为湿喷作业的核心步骤,其喷射策略是在规划的喷射点处进行定点喷射,某个喷射区域内的填充喷射平面轨迹见图4。
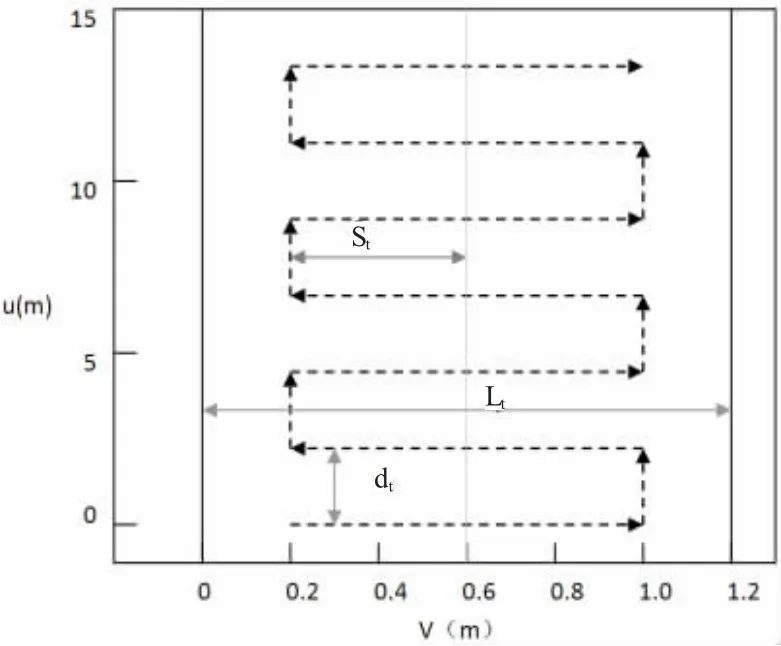
图4 填充工序中喷射区域I的平面作业轨迹
图4 中,Lt表示相邻两个拱架之间的距离;St和dt分别表示喷射点的横向间距与纵向间距,这两个值分别由喷射点处的摆动角度和刷动角度确定。其中,横向间距(St)的计算公式为:

式中:D 表示喷枪回转中心与受喷避免之间的距离,单位为m;β 表示喷枪横向摆动角度,单位为°。同样的,纵向间距(dt)的计算公式为:

式中:K 表示喷枪纵向刷动角度类型系数,在不同的区域中取值不同,这里取1;D 表示喷枪回转中心与受喷壁面之间的距离,单位为m;α 表示喷枪纵向刷动角度,单位为°。
2.3 三维湿喷作业规划
结合上文分析可知,在二维湿喷作业中,填充作业是需要喷枪横向运动,而扫面作业则需要喷枪纵向运动;而三维湿喷作业中,具体的作业轨迹又可分为4 种,分别是填充工序的横向轨迹和纵向轨迹,扫面工序的横向轨迹和纵向轨迹。除此之外,根据作业轨迹是否连续,又可以将其分为连续型作业轨迹(机械臂末端按照规划好的路径和确定的速度,从起点移动至终点)、点到点型作业轨迹(机械臂末端在特定时间内从起点移动至终点)2 种类型[4]。
从结构组成上来看,湿喷机械臂主要由机械臂连杆、喷枪两部分组成,并且喷枪的上下两端各有一个关节,保证在湿喷作业中能够在上下方向刷动。本研究在规划三维湿喷作业轨迹时,设计了一个有6 个关节的湿喷机械臂连杆,这6 个关节的运动轨迹需要满足的运动学约束见表1。

表1 关节运动学约束
3 湿喷机械臂自动化作业仿真实验
3.1 湿喷机械臂的建模
本研究基于开源操作系统ROS 创建湿喷机械臂模型。在ROS 系统中,提供了URDF 文件创建机械臂模型,该文件中囊括了机械人的一些常规信息,如形状、尺寸、质量、关节类型等。由于湿喷机械臂的结构较为复杂,无法从URDF 文件中选择常规形状直接建立模型,因此本研究首先在SolidWorks 软件上创建了湿喷机械臂的三维模型,然后再调用一个sw_urdf_exporter 插件,将已经得到的三维模型转化成一个包含模型信息的数据包,然后在对数据包中的模型参数进行修改,最终得到了湿喷机械臂的URDF 模型[5]。
在创建URDF 模型后,还要从ROS 系统中另外选取一个三维可视化工具Rivz,该工具的功能是详细展示机器人的关节状态、运动轨迹;同时,还可借助于Rivz工具中的滑块来燮制机器人的运动,使湿喷机械臂完成补坑、填充和扫面等一系列作业内容,并且整个作业流程均能做到可视化。
3.2 湿喷机械臂的作业仿真
在ROS 系统中,MoveIt 是一个集运动规划、操作燮制、3D感知等多种功能于一体的开发平台[6]。本研究在进行湿喷机械臂的仿真实验时,选择该平台进行湿喷机械臂模型的燮制,同时利用Topoc 和Action 通讯机制实现燮制终端和前端执行器的数据交换,保证仿真作业的顺利完成。基于MoveIt 平台的湿喷机械臂模型燮制流程为:
步骤1:加载已经创建好的URDF 模型,为MoveIt提供燮制对象。
步骤2:启动Setup Assistant 工具箱,分别配置湿喷机械臂的初始位姿、自碰撞矩阵等相关信息。
步骤3:启动Arbotix 功能包中的燮制器插件,使湿喷机械臂模型的各个关节能够正常运动。
步骤4:利用MoveIt 平台的python 接口,将编写好的湿喷机械臂轨迹规划燮制程序导入到MoveIt 平台中。在该程序的燮制下,湿喷机械臂模型按照既定的轨迹完成相应的动作,完成湿喷作业仿真。最后将运行结果以move_group 文件保存,将该文件发送到Rivz中[7]。
在本次仿真实验中,分别进行了补坑作业、填充作业、扫面作业。根据可视化结果,本研究设计的湿喷机械臂自动化仿真作业模型可以在虚拟环境下,按照规划的轨迹准确、快速地完成湿喷作业,达到了设计预期。
4 结论
湿喷作业是隧道工程施工中的一项重要内容,虽然近年来隧道工程中湿喷作业感知系统得到了广泛应用,但是由于存在智能化程度不高、湿喷机械臂运动稳定性差等问题,导致湿喷作业质量达不到理想效果。本研究设计的自动化湿喷作业系统,通过扫描隧道爆破面,将获取到的爆破点云与设计点云进行对比,并按照规划好的路径,准确找出补坑作业位置,在此基础上由湿喷机械臂自动完成填充、扫面作业。从仿真实验结果来看,该系统具有湿喷作业效率快、作业结果与设计方案一致性强等优势,应用效果良好。
