大直径泥水盾构气垫压力平衡控制系统研究
2022-01-29周小磊马志勇俞培德
张 杰,周小磊,马志勇,俞培德
(中铁工程装备集团有限公司,河南 郑州 450016)
泥水盾构在掘进过程中以压力泥浆维持开挖面的平衡稳定[1],目前大直径泥水平衡盾构一般在小型泥水平衡盾构的泥水仓基础上增加了气垫仓,以达到控制开挖面压力稳定的效果[2]。泥水盾构工作原理如图1 所示,水压、土压压力作用于盾构的开挖仓,压力平衡控制系统往气垫仓注入预设好一定压力的压缩空气,通过连通管原理,将压力传递到开挖仓。在盾构掘进过程中,通过稳定压力的传递,保持开挖面的稳定[3]。大直径泥水平衡盾构气垫压力平衡控制系统性能的稳定与否,直接关系到隧道能否安全、高效施工。

图1 泥水盾构工作原理
针对泥水平衡盾构开挖面稳定性研究,李昀、宋蕴璞[4-5]等针对开挖面稳定模型进行了试验研究,表明了泥水平衡盾构因开挖面压力控制原因导致的地表沉降,很大程度上取决于气垫仓压力的控制精度范围;李明杰[6]通过建立气垫仓动力学模型,分析了不同液位和不同切口压力下,采用不同的干扰仿真,验证了采用间接性气垫压力平衡控制系统可以很好地弥补环流系统劣势,改善整机的响应速度;刘傲杨[7]等对大直径泥水盾构气垫仓的保压技术进行了简单的介绍;文中保、王凯等[8-9]通过对泥水盾构自动保压系统常规PID 控制的动态特性进行分析,设计了自动保压系统的模拟控制器,研究了模糊控制算法对系统动态响应特性的补偿;俞培德[10]等介绍了气垫压力平衡的控制技术,进行了控制理论的研究分析,推导出几种提高系统精度和响应时间的方式。目前针对大直径泥水平衡盾构的研究工作,主要集中在泥浆、泥膜质量的研究,泥浆性质和泥浆的指标,对维持开挖面的稳定性重要性的研究,也有些学者,对泥水平衡盾构的泥水压力进行浮动性研究,对泥水平衡系统的控制策略进行了研究,但是针对大直径泥水盾构气垫压力平衡控制的应用研究,目前少有提及。
本文主要针对泥水盾构的气垫压力平衡控制系统进行研究。对系统工作原理、关键参数进行介绍,提出大直径泥水盾构压力平衡控制系统的设计,对气垫压力平衡系统在不同压力突变情况进行模拟,针对不同机器在不同地层中进行数据分析,进而验证针对大直径泥水平衡盾构设计的压力平衡控制系统的可行性。
1 泥水盾构压力平衡控制系统
泥水平衡盾构掘进中水土压力直接作用到开挖仓,进而将压力传递给气垫仓,之后气垫仓压力和开挖仓压力相互影响。即:气垫压力平衡控制系统维持着开挖面的稳定,同时对刀盘切削、土体不均、外部干扰等造成的开挖仓压力冲击与脉动进行缓冲和吸收。
对于泥水盾构来说,较多采用全气动压力控制系统型式,其控制系统如图2 所示。系统中包含有气源处理、减压阀、PI 控制器、压力传感器、进气阀、排气阀及消音器等。

图2 泥水盾构压力平衡控制系统
系统开始运行时,需在PI 控制器上设定好维持开挖面稳定的目标压力,掘进过程中,根据水土压力的变化,及时调整目标压力。系统运行过程中,压力传感器将气垫仓的当前压力实时传递给PI 控制器。PI 控制器根据目标压力与当前压力的差值进行控制信号的输出:当目标压力高于当前压力的时候,控制器信号将进气阀打开,此时,气垫仓压力在压缩空气的作用下上升;当前压力达到目标压力后,进气阀关闭;反之亦然。压力平衡控制系统通过不断的进气、排气,使气垫仓压力稳定在目标压力值附近,以此保证开挖面稳定。
泥水盾构掘进中,为了保证地表沉降的控制效果,空气压缩机不间断为系统提供压缩空气,这也是土压平衡盾构与泥水平衡盾构不同的一点。气垫压力平衡系统工作中,不仅要满足盾构机掘进中气液两相的压力平衡,还需配备空气过滤系统,当带压进仓的时候,要满足仓内作业人员的正常呼吸[11]。因此,对盾构气体保压系统设计进行分析,并对现场应用状况进行研究,显得十分必要。
2 压力平衡控制系统分析
采用气垫压力平衡系统来调节开挖面支护压力,需要掘进司机对泥水压力进行监测,出现动态变化、系统扰动等情况时要针对具体情况判断所设置的目标压力是否合适。
根据压力传递原理

式中Pk——泥浆压力;
Pa——气垫仓气体压力;
ρ——泥水仓泥浆的平均密度;
h——液位相对于盾体底部的高度;
R——近似取值刀盘半径。
按照式(1)分析,在掘进中,气垫压力平衡系统要能够满足泥浆液位突然升高或降低一个极小或极大的值而能够保证Pk值的稳定,也就是说,泥浆的液位高度直接影响气体体积,进而需要压力平衡控制系统能够快速的响应气体体积的变化。
2.1 压力平衡控制系统关键元器件
如图3 所示,作为感受气垫仓压力的压力传感器,此传感器为全气动驱动,常被叫做压力变送器。其原理为力矩平衡原理,气垫仓压力作用在测量元件处产生一个力,该力由平衡梁和可调支座传递到补偿梁上。当输入力、输出气压和反馈波纹管的力达到平衡时,系统平衡。当气垫仓压力下降时,内部结构平衡被打破,输出空气压力下降,直到新的平衡达成,即压力变送器输出的气压信号随着气垫仓实际压力实时变化。
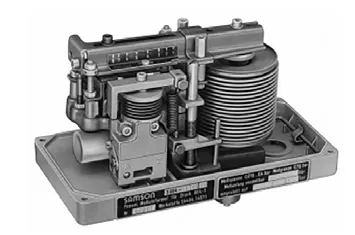
图3 气体压力变送器内部结构
泥水盾构压力平衡控制系统的设计中,针对所描述的气体通流量选用图4 所示的进排气阀门。阀芯的单位相对行程所引起的相对流量变化与此点的相对流量成正比,Kv值的等量变化即为行程的等量变化。

图4 进排气阀门
阀门选用前,需要计算液位升高或者下降时,进排气对应的体积流量。在常规直径盾构的设计中,一般情况下盾构机设计的开挖面平衡压力为6bar,气源压力按照8bar 进行选取,进气流量为12Nm³/min,排气流量为12Nm³/min。经过定量分析,在进口压力和出口压力一定的情况下,进排气阀的Kv值如表1 所示。
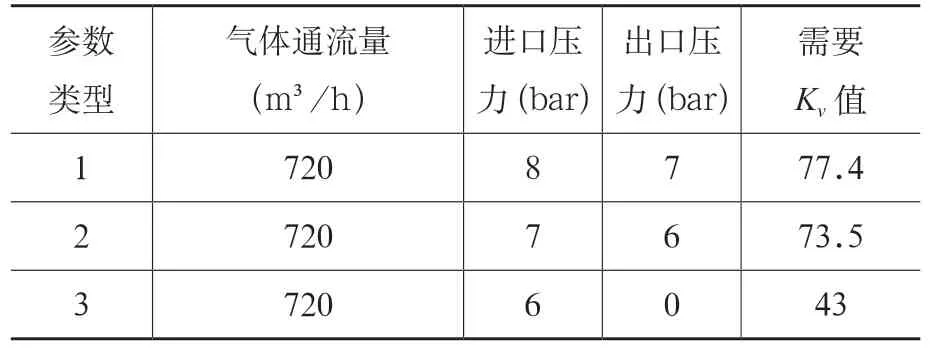
表1 进排气阀在不同工况下的Kv值
根据表1 中的参数进行选取,最终选取进气单座调节阀型号:DN80 PN16 KV80;排气单座调节阀型号:DN80 PN16 KV60。同时配备了能力为75kW,11Nm³/min,10bar 的空气压缩机,经过现场试验,可以有效地满足现场使用。
2.2 四回路压力平衡控制系统设计
随着我国对大型泥水盾构的需求越来越多,特别是对于超大型泥水盾构来说,施工安全更加重要,关乎开挖面稳定的气垫平衡控制系统要求的响应速度和精度需求也越来越高。
在某大直径泥水盾构的设计中,保压系统按照常规直径的盾构进行设计,根据进排气所需要的气量计算,采用了大口径的进排气阀门进行气垫平衡的控制,掘进结束,整个项目的施工沉降控制在了0.7mm 以内,刷新了国内大直径盾构穿越既有建筑物沉降控制的最新纪录。
针对现场的使用反馈,此系统工作较为稳定,但遇到卡泵、堵管等突发状况的时候,气垫压力控制的滞后性较为明显。由此可见,超大直径泥水盾构的设计中,对大直径泥水盾构气垫压力的快速响应和高精度控制研究显得十分必要。
根据气垫压力平衡系统控制理论,单位时间内压力的变化(压力波动)公式如下

式中K线性——阀门流量线性特征常数;
K弹簧——阀门驱动器内弹簧的弹性系数;
P3——定位器进口压力;
Kv定——阀门定位器流量特性参数。
由式(2)可知:降低K线性值、提高K弹簧值可以减少压力波动,提高系统响应精度;增大P3值和Kv定值可以有效提高系统响应时间。
如图5 所示,在大直径泥水盾构气垫压力平衡系统的设计中,可以通过增加进气、排气并联管路和速度放大器,配合进行精准分段控制的PI控制盒,可以有效降低和增大对应的K、Kv和P值。

图5 四回路压力平衡控制系统简图
首先,进排气回路分别采用DN125 和DN80阀门并联安装,如图6 所示,按照阀门的通径进行流量分配,从而将单路阀门的K线性值和K弹簧值降低,减少系统判断时间加快阀门运行速度。
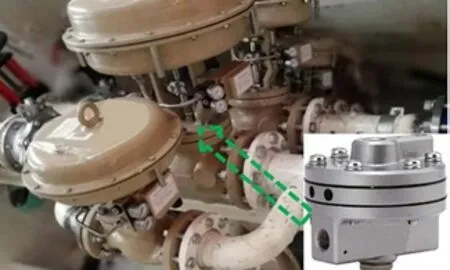
图6 配速度放大器的进排气阀门
其次,在阀门的定位器前端增加速度放大器,将控制气源和阀门定位器的控制信号引入放大器,通过放大器作用,将P3值和Kv定值加大,最大幅的提高阀门定位器的驱动速度,从而保证系统快速响应。
最后,控制器内部比例调节和积分调节控制单元采用分段精准调节的方式。在液位平稳的掘进和人员带压进仓时,采用DN80 阀门进行进排气的控制;在进浆流量和排浆流量突变的时候,DN80 和DN125 阀门共同作用,通过大流量的进气和排气,实现对开挖面的稳定控制。
3 四回路压力平衡控制系统分析
根据气垫压力平衡系统的控制理论,结合各元件的工作原理,利用仿真软件建立了如图7 所示的压力平衡控制系统仿真模型。
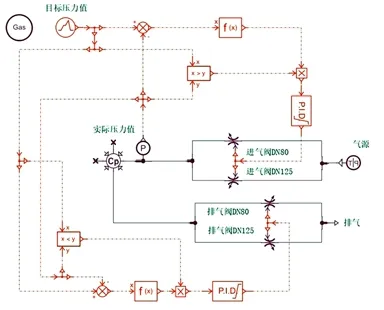
图7 压力平衡控制系统仿真模型
模型中目标压力值是根据实际工况需要设定好的目标值,气源为恒压源,进气阀和排气阀按照现场实际选用的阀门进行压力-流量特性曲线的设定,在稳定的工况下,实际压力和目标压力一致。为了模拟突然出现压力波动的情况,在仿真系统中,将实际压力值重新赋值,模拟系统的响应速度。
模型中的主要参数按照温度30℃,气源压力12bar,气垫仓压力6bar,气垫仓的初始压缩空气体积205m³的工况进行模拟。
3.1 四回路压力平衡控制系统工作原理
四回路压力平衡系统工作中,压力变送器实时反馈气垫仓压力,压力信号传输至PI 控制器。PI 控制器根据目标值与实际值的偏差,输出0.2~1bar 的控制压力到进排气调节阀。其中,控制压力在0.2~0.6bar 的时候,排气阀打开,气垫仓压力下降;控制压力在0.6~1bar 的时候,进气阀打开,气垫仓压力上升;控制压力在0.6bar时,所有阀门关闭,气垫仓保持稳定状态。
当作业人员带压进仓或液位平稳的正常掘进中,压力波动较小的工况下,此时需要小流量进排气,PI 控制器的输出压力在0.6±0.2bar 范围内波动,此时进排气小阀动作,保证了小流量的精准调节。
当发生进浆瞬间停止或排浆瞬间停止需要进行大流量的进排气的时候,PI 控制器的输出压力在0.6~0.8bar 或0.2~0.4bar 范围内波动,此时进排气的所有阀门同时动作,保证了大流量快速通过。
3.2 系统模拟
为了验证双回路压力平衡系统与四回路压力平衡系统对气垫压力突变的响应速度,给出同一个6bar 的目标值,分别模拟DN125 阀门动作和四回路系统压力变化曲线。
如图8 和图9 所示,当模拟气垫仓压力突然升高或降低时,由于目标值不变,压力平衡控制系统会立刻将排气阀/进气阀打开,并且随着气垫仓实际压力趋于目标值,排气速率逐渐变小。

图8 气垫仓压力升高仿真图

图9 气垫仓压力降低仿真图
据模拟结果分析如下。
采用DN125 单路大口径进排气阀的双回路系统的响应在20s 左右趋于稳定,其曲线变化速率较四回路系统明显较慢。
采用DN125 和DN80 双阀门进行压力平衡的四回路系统,在10s左右达到了压力的平衡效果,在保证大流量气体通过的同时,保证了系统的响应速度。
理论和仿真分析表明,四回路压力平衡控制系统可以更好地保证在突发状况下泥水盾构开挖面的稳定。
4 四回路压力平衡控制系统应用
经过以上设计分析,在大直径泥水盾构采用四回路压力平衡控制系统可以提高系统的控制精度、响应速度,从而使得原系统的性能得到明显的提升,达到快速对开挖面支护压力补偿、维持地表稳态的目的。
4.1 系统实验室测试曲线
如图10 所示,在实验室测试某盾构压力平衡系统,通过自动控制信号给出波动规律的进排气操作,在采集气垫仓仓压设置为2bar 的情况下,采集了PI 控制器的输出信号。

图10 系统对扰动的适应曲线
进排气阀门扰动的开度在0~20%波动的过程中,由于排气阀先行扰动,此时气垫仓压力有一定的降低,进气需要进行补气操作,所以PI 控制器的输出信号在0.6~0.8bar之间无规律的波动,但气垫仓压力始终维持在2bar,没有出现波动。
对PI 控制器输出信号的分析可以得出,控制阀门开关的信号在一定范围内不停地波动,阀门的开度在此信号的控制下,不停地进行变化,如同液压系统作用在比例电磁阀上的颤振信号一样,一定程度上也增加了系统的反应速度。
4.2 在大直径盾构的应用
超大直径泥水盾构施工中,更加高效的压力平衡控制系统显得尤为重要。目前,在超大直径泥水盾构的设计中,普遍采用了上述四回路压力平衡控制系统。经过十余台超大直径泥水盾构的验证,本系统安全可靠、控制沉降效果更好。
4.2.1 在大连海底隧道应用
大连地铁5 号线火梭区间海底隧道,由于需要在破碎基岩地层中开挖,岩层破碎裂隙大,泥膜难以形成,掌子面易出现塌方等严重事故[12],对压力平衡控制系统的要求极为苛刻。
在此台盾构的设计中,采用了四回路压力平衡控制系统,如图11 所示,对相关参数进行分析。在气源压力不稳定的工况下的掘进中,推进速度在破碎基岩地层中产生了较大幅度的波动,但是采集到的气垫仓、泥水仓压力,均稳定在所设置目标值,此系统对恶劣地层气垫仓压力的稳定,起到了至关重要的作用。

图11 大盾构1的相关参数
4.2.2 在波兰大直径盾构的应用
中国出口海外超大直径泥水盾构“Islander”需要下穿波兰的Swina 海峡,同样采用了四回路压力平衡控制系统。
如图12 所示,采集了掘进速度、气垫压力和开挖舱压力进行分析。由于地层较为稳定,掘进速度没有了图11 中的速度大幅度波动,无论掘进速度如何变化,开挖仓的压力均稳定在目标值,此系统很好地适应了大直径泥水盾构的掘进需要。

图12 大盾构2的相关参数
5 结论与建议
研制了适用于超大直径泥水盾构的四回路气垫压力平衡控制系统,通过增加进排气并联管路和速度放大器,配合PI 控制的高可靠性,实现了超大直径泥水盾构气垫压力的快速响应和高精度控制。
超大直径泥水盾构气垫压力平衡控制系统的研制及应用,解决了越来越多的大直径泥水盾构施工中对开挖面支护压力要求越来越高的难题,提高了穿江越海隧道的施工安全性。
