全景影像在大马力推土机的应用研究
2022-01-29刘曰奇黄晓婷万光前
刘曰奇,黄晓婷,徐 卓,万光前
(山推工程机械股份有限公司,山东 济宁 272073)
推土机在工程建设中发挥重要作用的同时,也往往伴随着安全生产问题。大马力推土机作业环境复杂,整机外形庞大,因设计原因不可避免地存在视野盲区,仅靠后视镜及现有视野范围很难保证周围安全。
随着经济的发展和社会的进步,安全生产问题越来越受到整个社会的关注和重视。安全施工不仅要依靠驾驶员的个人技术和安全意识,也需要提升车辆的安全设施和智能化水平。全景影像系统可以为驾驶员提供设备周围影像,有效减少视野盲区,有助于提高施工安全性。近年来,全景影像系统在汽车上应用越来越广泛,但在工程车辆特别是推土机上的应用还很少。我司某型大马力推土机配置全景影像系统,实现了推土机智能化和定制化的突破,此外该系统数据既能本地实时存储,也可实时上传至后台进行统一管理、调控,有效提升智慧矿山的建设水平。
1 全景影像系统简介
全景影像系统通过安装在周围的图像采集设备进行图像采集,把图像信息传输至主机进行图像处理,最后将处理后的图像传输至显示屏上。显示屏安装于驾驶室内,驾驶员通过显示屏可直观观察车辆周围情况,为安全驾驶提供便利,提高整机运行的安全。
为得到大马力推土机车身周圈全景环绕视图,需在推土机上安装图像采集设备。图像采集设备一般为不同类型摄像头,常见的有平角摄像头、广角摄像头。鱼眼摄像头是一种焦距短,视角大的广角摄像头,优点在于超大的视角,可包含更大的场景范围,但也存在采集的图像严重畸变的缺点,该畸变图像不符合正常的视觉习惯,需要进行算法矫正。全景影像系统的方案流程如图1 所示。
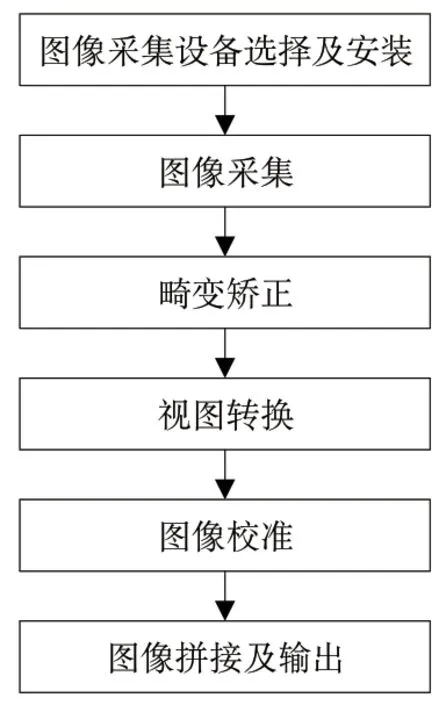
图1 全景影像系统方案流程图
2 大马力推土机视野分析
司机视野直接影响车辆主动安全性,是整车总布置及造型设计要始终关注的基本方面。本文采用CREO 中的Manikin 模块,人体模型选择ISO 3411 男性5%、50%、95%人体,根据标准GB/T 16937-2010《土方机械 司机视野 试验方法和性能准则》和ISO 5006:2017 等对某型大马力推土机进行视野分析,该推土机外形尺寸为11.5m×5.3m×4.6m,使用重量110t。
依据GB/T 16937-2010《土方机械 司机视野 试验方法和性能准则》相关规定,如图2 所示,对推土机进行12m 可视性实验圆视野计算机模拟计算分析,实验眼距按205mm 计算,分析结果见图3。

图2 推土机可视性实验的定位
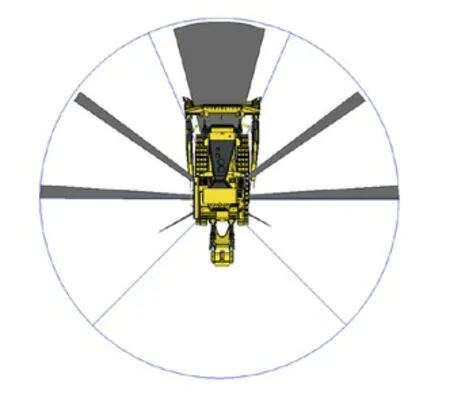
图3 大马力推土机12m实验圆遮影图
根据分析计算可知,遮影范围主要有前机罩和驾驶室A 柱、驾驶室B 柱、防翻滚架以及驾驶室C 柱,其中前机罩和A 柱12m 实验圆上遮影宽度较大,视野区域A 遮影宽度约为6 000mm;视野区域B、C 范围内,左右B 柱遮影宽度约为800mm;防翻滚架遮影约为900mm;左右C 柱遮影范围较小,可忽略不计。
由于大马力推土机外形尺寸较大,前机罩在推土机1m 距离处遮影较大。其他方向视野情况较好,后侧可直接观察到松土器齿尖,两侧可直接观察到履带以及推土机铲刀刀角,工作装置视野情况较好,司机可观察推土机工作装置的工作情况。
综上所述,大马力推土机工作视野良好,受限于车体尺寸,前方视野及防翻滚架两侧区域周围环境存在视野盲区,存在安全驾驶隐患。
3 全景影像系统在大马力推土机上的应用
全景影像系统一般需要多个摄像头协同采集图像数据,为满足系统的需求,同时尽量减少系统复杂性,本文采用4 个视角为180°鱼眼摄像头,分别安装在推土机四周,用于采集推土机周围区域的图像信息,如图4 所示。左右镜头视角与车身平行;前后镜头视角与车身垂直。

图4 镜头安装示意图
全景影像系统需要对摄像头采集的图像数据进行处理:畸变矫正、俯视投影变换、图像配准以及图像融合等运算,系统须具备强大的计算处理能力、优良的实时性和稳定性等特点。采用HI3521 系统为核心,主要包括:电源模块、图像采集模块、图像处理模块、协同处理模块、存储模块以及CAN 通信模块等。
图5 是采集的4 幅鱼眼图像。得到鱼眼图像后对其使用标定方法进行图像矫正。本文采用调试布坐标点方式进行图像矫正,调试布规格:大黑格1×1m,棋盘小黑格0.2×0.2m,调试布放置示意图如图6 所示。

图5 鱼眼镜头采集图像

图6 推土机调试布示意图
经图像融合,选取适当范围的图像作为俯视图像,将推土机整机三维模型置于图像中心,即得到了推土机全景效果图,如图7 所示。整机实际使用时,显示屏显示区域分为两部分,左侧显示整机俯视图,右侧显示车辆正前方视图。同时系统支持CAN 协议,通过CAN 总线的输入信号来控制图像采集、图像处理以及图像显示模块的工作状态,如当系统检测到CAN 总线的R 档信号,显示屏右侧视图自动切换至后方图像。

图7 图像矫正拼接后图像效果
限于推土机的外形尺寸及前、后工作装置的工作特点,为实现整机完全成像,满足全景影像拼接效果,推土机驾驶员视野盲区未完全消除。经实际测量,盲区范围:前方铲刀正前约3m,左右两侧刀角至履带宽度约0.7m,松土器正后约1.5m。与未安装全景影像系统相比,司机视野盲区范围明显减小。
经推土机在矿山工作中实际测试,全景影像系统显示效果良好,无明显拼接痕迹,整体亮度均衡,且视频输出稳定,达到25 帧/s,左右转向及前进后退切换时,视频显示无明显延迟和卡顿,系统的实时性良好,满足实际应用。
4 结语
随着我国工业化进程的推进,大马力推土机施工过程中,如何应对复杂环境下人员或工程车辆靠近及避免碰撞的发生,是施工方和设备厂商亟须解决的问题,研究全景影像系统在大马力推土机上的应用具有重要的实际意义。大马力推土机配置全景影像系统,为驾驶室实时呈现推土机周围360°环境影像,可明显减小视野盲区,提高施工安全性。
