基于传感器特性不规则区域瞬时覆盖分析
2022-01-28王飞龙杨纪伟牛威赵树立陈霞
王飞龙,杨纪伟,牛威,赵树立,陈霞
(1.中科星图(西安)测控技术有限公司,陕西西安,710100;2.中国电子科技集团公司第五十四研究所,河北石家庄,050081)
0 引言
不规则区域瞬时覆盖分析对于卫星任务规划和星座设计等都具有非常重要的意义。瞬时覆盖分析的主要任务是计算在给定的时刻单颗或者多颗卫星对不规则区域的覆盖率和覆盖重数等指标[1]。目前区域瞬时覆盖分析有解析法[2]、网格点法[3-5]和基于几何拓扑运算的方法。
解析法[6]基于卫星与地球的几何关系直接得到覆盖面积计算的解析公式,这种方法只适于单颗卫星覆盖性能分析,且待分析区域必须包含卫星覆盖范围[1]。
目前最常用的是网格点法[3],其易于实现、应用广泛,且可以避免重合覆盖区域的多次统计,但如果需要高精度的覆盖分析需要加密格网,造成计算机资源消耗大,空间复杂度和时间复杂度显著提高的问题。
王荣峰[1]、白萌[6]和吴晓洋[7]等均已实现了基于几何拓扑关系运算的方法。但是王荣峰[1]和白萌[6]没有充分考虑卫星的姿态和星载传感器的特性,后者没有考虑多重覆盖的情况,且采用基于STK 软件[12]进行了实现;吴晓洋[7]等对网格法和基于几何拓扑关系法进行了描述和实现,但没有实现对区域的多重覆盖分析,且同样没有考虑卫星的姿态和星载传感器特性。
针对以上的现况和问题,本文在实现的过程中考虑了卫星的轨道、姿态、星载传感器的安装位置、指向、视场和载荷类型等传感器特性信息,采用基于几何拓扑关系运算的方法实现了传感器对不规则区域的瞬时覆盖分析。传感器覆盖计算基本流程如图1 所示。其中传感器特性分析包含卫星轨道预报、卫星姿态预报和卫星传感器覆盖计算,不规则区域瞬时覆盖分析包含传感器对不规则区域的覆盖分析和不规则区域多重覆盖分析。

图1 传感器覆盖分析基本流程图
对传感器的特性分析的第一步进行卫星的轨道预报;第二步根据卫星的轨道进行姿态预报;第三步在卫星姿态预报的基础上根据传感器的安装位置、指向和视场等信息进行覆盖分析计算;第四步利用几何拓扑学对不规则区域和传感器对地的覆盖范围进行拓扑分析;第五步进行覆盖分析。
为实现对覆盖分析结果进行可视化仿真,以及保证可视化的准确性和效率,采用基于中科星图(西安)测控技术有限公司研发的“洞察者空间信息分析系统”(以下简称“洞察者”)进行可视化显示。“洞察者”是航天领域的分析软件系统,用于支持航天任务的设计、测试、发射、运行和任务应用全过程,采用可视化方式完成用户输入和分析计算结果的直观展现,以完整的专业计算分析算法模块提供对航天任务的设计分析和仿真验证。其采用自主创新的空间信息处理算法,集成了航天任务中多年的技术研发成果和应用模型,可应用于空间任务分析、航天遥感、导航定位、空间监视、航天模拟训练、空间试验等领域,软件全部代码自主研发,能够在Windows、Linux、麒麟等多类操作系统上运行。同时,洞察者已经经过中国航天科技集团公司软件测评中心的第三方测试,已经具备发布和全面推广的条件。
1 传感器特性分析
■1.1 卫星轨道姿态预报
1.1.1 卫星精密轨道预报
卫星精密轨道预报是指利用一组轨道根数计算航天器在一定约束条件下未来时段内的准确运动状态(包括位置和速度)。需要考虑适合的动力学模型,利用数值积分外推就能得到卫星在不同时刻的位置速度。动力学模型包括考虑二体加速度、大气阻力摄动、地球非球形引力摄动、三体引力摄动、极移摄动、潮汐摄动、光压摄动。
将轨道动力学方程建立在标准历元J2000.0 平赤道地心惯性系(以下简称J2000 系,是地心惯性坐标系的更加具体化)中,此惯性系Oxyz 的原点O 为地心,基本平面(x-y平面)为历元J2000.0 对应的平赤道,x 轴指向该历元的平春分点,z 轴垂直基本平面,指向北天极,y 轴在基本平面上垂直x 轴,形成右手坐标系。航天器的轨道动力学方程为:

式中μ=GMe=3.986004418×1014m3/s2为地心引力常数,r是航天器地心位置矢量,等号右边第一项为地球的中心引力加速度。Ac为推力(即控制力)加速度,在本文中,仅研究各种摄动力对航天器轨道和姿态的影响,不添加任何控制力,取为零,AD为各种摄动力的加速度之和,按摄动源可以主要分为如下六大类:

式中,ANSE是地球非球形摄动加速度,在此,地球被视为一个形状和质量分布不变的不规则的天体;AN是第三体引力摄动,其中对航天器的影响包括太阳引力摄动加速度和月球引力摄动加速度;APN是后牛顿效应(爱因斯坦效应)摄动加速度;Adef地球形变摄动加速度,与地球非球形摄动不同,在此考虑了地球质量和形状的变化,主要可分为固体潮摄动、海洋潮摄动、大气变化摄动和地球自转形变摄动等;Aa是气动力摄动加速度;AR是太阳光压摄动加速度。以上六大摄动源中,前四项仅对航天器的轨道产生直接影响,在姿态动力学方程中将不会出现,后两项对轨道和姿态都有直接的影响,轨道预报处理流程如图2 所示。

图2 轨道预报处理流程图
1.1.2 卫星姿态预报

式中I为航天器惯性张量,h为动力轮相对航天器本体的角动量,为航天器相对惯性系的角速度矢量,与本体系相对轨道系的角速度及轨道系相对惯性系的角速度ωOI的关系为:

式中,

式(3)右端第一项为动量轮控制力矩,TE为环境干扰力矩,主要分为如下几部分:

式中,Tg是重力梯度力矩;Ta是气动力力矩;Tm是地磁力矩;TR是太阳光压力矩。
卫星姿态预报处理流程如图3 所示。
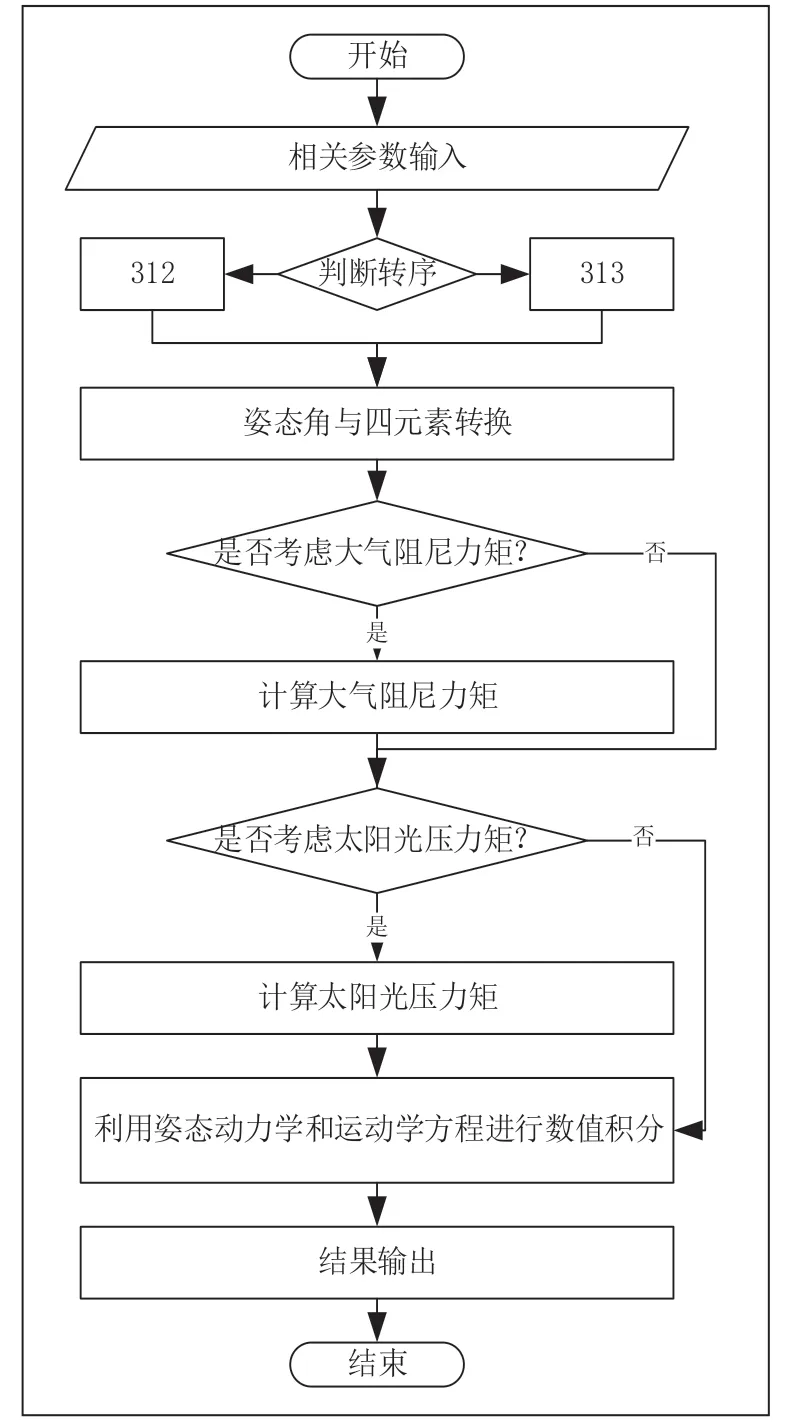
图3 姿态计算流程
■1.2 传感器覆盖范围分析
1.2.1 传感器对地作用范围定义
卫星传感器作为空间信息分析工具的核心对象,通常用来模拟展现各类光学、雷达、天线、激光收发机等设备。通过矩形传感器来模拟光学传感器和SAR 传感器,使用幅宽和测摆角影响垂直半角和水平半角。通过简单椎体传感器模拟电子传感器。矩形传感器作用范围由垂直半角参数、水平半角参数、中心视轴指向确定如图4 所示。圆锥传感器的作用范围由圆锥半锥角和中心视轴指向共同决定,如图5所示。

图4 矩形传感器示意图

图5 圆锥传感器示意图
考虑到卫星的轨道、姿态、传感器的安装位置和指向等因素的作用,传感器对地的作用范围由不相交、全相交、半相交和包地球四中情况[13]如图6 和图7 所示。

图6 传感器与地球相交及全相交图

图7 传感器与地球半相交及包地球图
1.2.2 传感器对地作用范围分析原理
矩形传感器和圆锥传感器范围原理相似,本文以圆锥为例进行描述。传感器对地作用范围分析包含作用范围与地球相交判断、计算作用范围与地球的交点和作用范围与地球切点的计算三个方面,计算原理如下:
(1)作用范围与地球相交判断
相交判断的原理是依据传感器作用范围与地球的相切角和实际角度对比,如图8 所示。判断的过程分为三步:

图8 作用范围与地图相交原理图
第一步,利用向量SO、地球半径R 和反正弦函数计算相切角α(图中的∠OSP2);
第二步,利用向量SO和向量SP(实际向量,例如SP1、SP2 和SP3 等)计算实际夹角β(图中∠OSP1);
第三步,利用α 和β 的大小关系判断相交情况,角α大于角β 时相交,角α <角β 时不相交,相等时相切。
(2)作用范围与地球交点计算
作用范围与地球交点计算步骤如下:
第一步,计算向量SP 与向量SO 的夹角β(图中∠SP1);
第二步,在三角形SOP1 中,利用三角几何关系求解边SP1 的长度;
第三步,利用向量SP1 和长度求解交点的坐标。
1.2.3 传感器作用范围所有点计算
传感器作用范围核心计算方法如下:
第一步,在全局坐标系统(J2000 坐标系)下根据不同类型的传感器参数计算传感器的作用范围,如图9 所示;

图9 圆锥传感器沿中心视轴旋转示意图
第二步,根据传感器位置和中心视轴指向,将原始作用范围旋转平移至传感器实际的位置和朝向;
第三步,判断传感器作用范围与地球相交情况;
第四步,根据相交情况计算实际作用范围,并进行可视化显示。传感器覆盖范围计算流程如图10。

图10 传感器覆盖计算流程图
2 不规则区域瞬时覆盖分析
对不规则区域瞬时覆盖分析时常采用格网法,首先要进行格网划分,如图11、图12 和图13 所示分别对不规则区域“面目标1”进行5°、2°和1°经纬度间隔格网进行划分,其中红色框表示的部分代表格网对不规则区域瞬时覆盖情况。可明显看到虽然采用格网划分随着间隔的越小越趋近于不规则区域,但是始终无法完好的表示,同时将造成覆盖分析的计算量和硬件消耗资源成倍的增加,而分析的精度没有明显的提高。

图11 按照经纬度间隔5°划分

图12 按照经纬度间隔2°划分

图13 按照经纬度间隔1°划分标记
针对网格法的不足,本文采用基于几何拓扑关系运算的方式解决传感器对不规则区域瞬时覆盖分析的问题。该算法由传感器对地的覆盖区域在二维平面的投影变换计算、不规则区域在二维平面的投影计算和几何拓扑关系运算等组成。首先将卫星传感器对地瞬时覆盖区域的二维投影与不规则目标区域的二维投影做交集运算。然后,将不同卫星传感器与不规则区域的求交集结果进行求并运算,即可以获得多颗卫星对不规则区域的高精度瞬时覆盖区域。以下将描述采用几何拓扑关系进行覆盖分析计算的处理流程。
传感器对不规则区域瞬时覆盖分析依赖于传感器覆盖范围和地面目标区域,通过覆盖范围和目标区域的地理信息以及几何拓扑关系进行覆盖分析,分析流程如图14 所示。具体步骤如下:

图14 覆盖分析处理流程图
第一步,将传感器的覆盖范围信息由J2000 坐标系下转换至地固系下;
第二步,将地固系下的范围坐标信息转换至墨卡托投影的二维平面,在二维平面上通过几何拓扑关系计算传感器覆盖范围与不规则区域的相交关系,获得相交区域;
第三步,如果有多颗卫星,计算每颗卫星传感器与地面区域的相交区域,然后将每个相交区域进行求并集运算,获得相关卫星传感器对地面区域的总覆盖;
第四步,在一重覆盖的基础上采用相似的几何拓扑运行计算二重覆盖,以此计算更多重覆盖;
第五步,在二三维场景中按照覆盖重数绘制覆盖分析结果。
3 仿真分析
为检验实施方案的正确性,采用“洞察者”进行分析显示,示例数据如下:
■3.1 卫星及载荷信息
(1)卫星1 相关信息(图15、图16)

图15 卫星1 轨道及姿态参数

图16 卫星1 传感器锥角和指向参数
(2)卫星2 相关信息(图17、图18)

图17 卫星2 轨道及姿态参数

图18 卫星2 传感器锥角和指向参数
(3)卫星3 相关信息(图19、图20)

图19 卫星3 轨道及姿态参数

图20 卫星3 传感器锥角和指向参数
(4)卫星4 相关信息(图21、图22)
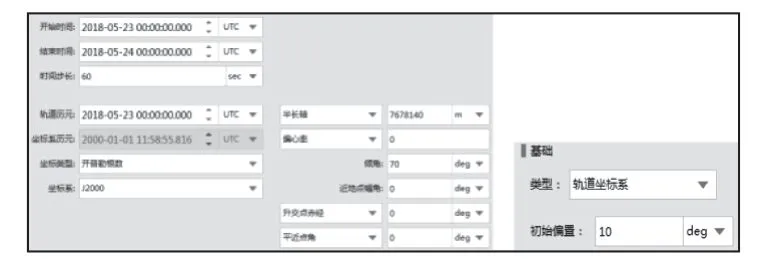
图21 卫星4 轨道及姿态参数

图22 卫星4 传感器锥角和指向参数
■3.2 区域信息
不规则区域信息如表1。

表1 不规则区域顶点坐标清单表
■3.3 处理流程
覆盖分析可视化从专业计算(卫星轨道预报、卫星姿态预报、传感器覆盖计算和多重覆盖分析等)组件获取相关态势数据和空间对象数据,然后根据仿真时间自动刷新二、三维场景,最终实现多重覆盖分析的可视化,实现流程如图23所示。

图23 覆盖分析可视化显示处理流程图
■3.4 效果展示
通过选择面目标和卫星进行参数配置,试验中选择所有的卫星参与瞬时覆盖分析计算,如图24 所示,然后点击计算即可实现卫星对区域的瞬时覆盖分析。

图24 覆盖分析可视
为了区分不同重述的覆盖分析,采用颜色进行区分。一重覆盖分析考虑了所有卫星传感器对区域的覆盖,采用拓扑运算中的求并集计算,效果如图25 所示。

图25 传感器对不规则区域一重覆盖
二重覆盖是在一重覆盖的基础上,首先对一重覆盖区域进行两两拓扑求交运算,然后对求交的结果进行拓扑求并运算,效果如图26 所示。
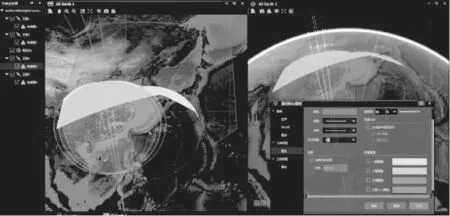
图26 传感器对不规则区域二重覆盖
三重覆盖是在二重覆盖的基础上,首先对二重覆盖区域进行两两拓扑求交运算,然后对求交的结果进行拓扑求并运算,效果如图27 所示。

图27 传感器对不规则区域三重覆盖
四重覆盖是在三重覆盖的基础上,首先对三重覆盖区域进行两两拓扑求交运算,然后对求交的结果进行拓扑求并运算,效果如图28 所示。
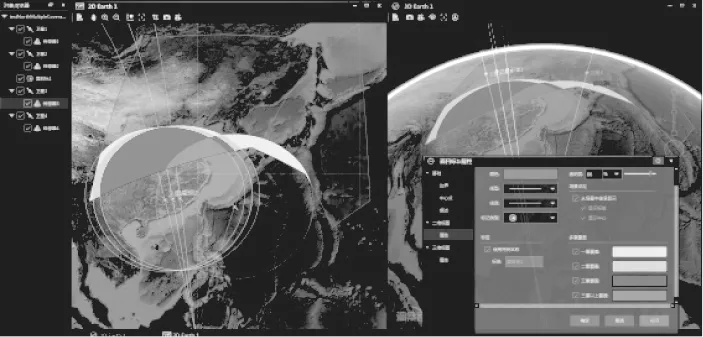
图28 传感器对不规则区域四重覆盖
从图25 传感器对不规则区域一重覆盖分析可以看出,采用几何拓扑关系进行传感器对不规则区域分析很好的解决了格网法无法覆盖不规则的部分,如图中红色圆圈部分。同时,采用几何拓扑关系运算分析大大提高了运算的效率,减少了硬件的消耗。覆盖分析的精度成倍的提高。
4 结束语
根据目前对不规则区域瞬时覆盖的研究现况,本文提出了基于传感器特性和几何拓扑关系对不规则区域的进行瞬时覆盖分析的方案。方案考虑了卫星的姿态和传感器的安装位置、指向等信息,对传感器作用范围与地球的关系进行了分析,并在“洞察者”基础上进行了实现和验证,实现了对不规则区域瞬时多重覆盖分析,其效率和质量明显优于网格法,满足了当前卫星的区域覆盖在普适性、高效性和高精度性方面的要求,具有很高的使用价值,为下一步实现卫星任务规划打下基础。
