半潜式海工生活平台摇荡运动与居住舒适性研究
2022-01-27胡开业王寿军韩荣贵
胡开业, 王寿军, 韩荣贵, 陈 默
(1.哈尔滨工程大学 船舶工程学院, 黑龙江 哈尔滨 150001;2.中集海洋工程研究院有限公司, 山东 烟台 264000)
0 引 言
半潜式海工生活平台为人们的海上活动提供休闲住宿和餐饮娱乐等服务,这些服务对平台的舒适性有极为严格的要求[1]。例如中集来福士海洋工程有限公司自主开发的半潜式生活平台CR600(见图1),其生活区的居住条件超过陆地上的五星级酒店,满足美国船级社移动式钻井平台舒适性标准HAB+和英国安全与健康执行局对舒适性的要求,振动和噪声满足挪威NORSOK标准的要求。
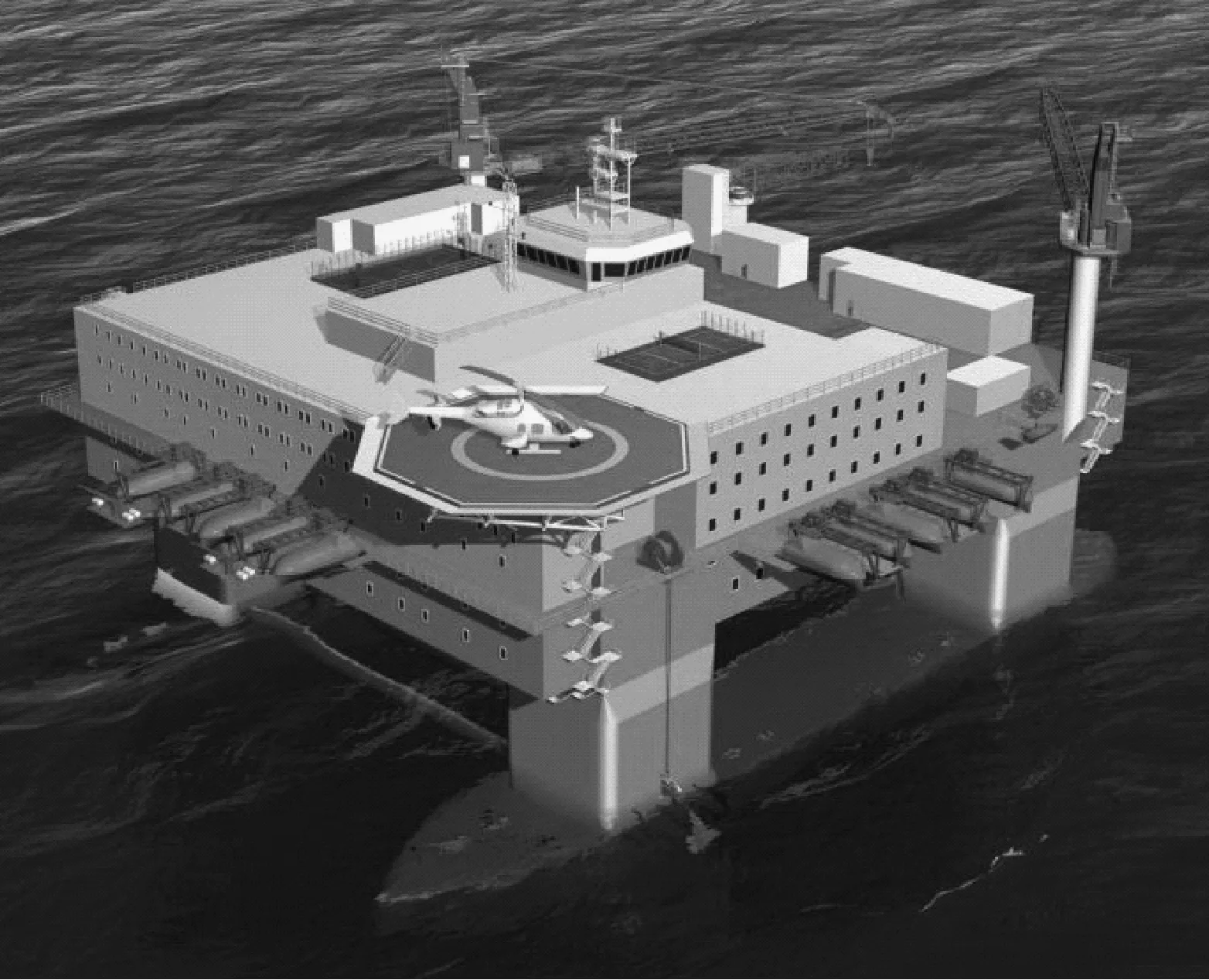
图1 半潜式生活平台CR600
在深水开阔海域,平台在复杂的海浪环境下剧烈摇荡对平台上人员居住的舒适性不利,易导致人员出现晕动症,从而影响其工作效率和平台的舒适性。目前对半潜式平台运动性能的研究多集中在水动力性能方面,例如:丁凯等[1]研究了半潜式生活平台与生产平台并靠泊时的水动力载荷特性,研究发现,纵浪比横浪更易引起两平台之间产生明显的水动力作用;赵静[2]采用海洋工程水动力分析软件SESAM分析了半潜式生活支持平台不同关键位置处的运动响应;徐静雯等[3]采用商业软件AQWA对半潜式平台模型在生存海况和作业海况下的运动进行了频域分析,结果发现,平台在生存海况下的运动响应比作业海况下的运动响应剧烈很多;EZOJI等[4]研究了波浪参数对平台运动响应的影响,基于莫里森理论和衍射理论计算了某平台的波浪载荷,结果表明,随着波浪周期的増大,垂荡运动谱和波浪谱越来越接近;王世圣等[5]采用三维势流方法对横撑结构不同的2种典型深水半潜式平台的波浪载荷进行了分析研究。目前的研究缺乏对平台摇荡运动和海洋环境与平台舒适度之间的关系[6-9]的分析,本文对某典型半潜式海工生活平台在不同海况下的摇荡运动和关键位置处的加速度进行分析,考察该平台的舒适性。
1 半潜式平台水动力模型
1.1 理论基础
由刚体动力学基础中的质心动量定理和动量矩定理可得出,在经过线性化处理之后,浮体的运动方程[10]为
(1)
式(1)中:Mjk为平台的质量矩阵;Ajk为平台的附加质量矩阵,Bjk为平台的阻尼矩阵;Cjk为平台的回复力刚度矩阵;fdj为平台受到的外激励力;ηk为平台的运动幅值。
当求解出浮体在波浪中运动时的附加质量和受到的阻尼及平台受到的外激励力值之后,即可通过式(1)求解得到平台的运动响应。在分析大型浮体结构在波浪中的运动时,基于势流理论[11]进行分析是一种比较常用的方法,浮体与波浪相互作用的情况可很好地体现出来。在进行浮体绕射和辐射水动力分析时,自由面格林函数边界元法(即三维脉动源格林函数法)已得到广大研究人员的认可。该方法是基于三维势流理论得到的,目前有多个利用该方法开发的软件程序可用。本文采用基于三维面元法的水动力分析软件AQWA分析平台的水动力性能。
1.2 半潜式生活平台建模
本文的研究对象为半潜式生活平台CR600,其作业水深为1 500 m,水动力计算主要针对作业工况,该工况下平台的参数见表1。

表1 作业工况下半潜式生活平台的参数
利用ANSYS软件建立该平台的面元模型,通过该软件分析水下主体部分的水动力性能,利用Morison方程[12]对作用在水平横撑上的拖曳力进行计算。单位长度横撑受到的波浪力为
(2)
式(2)中:CM为拖曳力系数;CD为惯性力系数;M为拖曳力;D为惯性力。一般情况下,对于圆柱体,CM=1.0,CD=2.0。基于上述势流方法和Morison方程黏性理论,即可预报半潜式生活平台的运动响应。
该平台的作业水深为1 500 m,采用12点锚泊定位系统,锚缆设计为链-缆-链复合型式,分成4组,每组3根,每组在水平方向上以90°夹角布置。锚索采用链-缆-链组合形式,其中中间段采用钢丝绳。
2 半潜式生活平台在波浪中的运动响应数值模拟
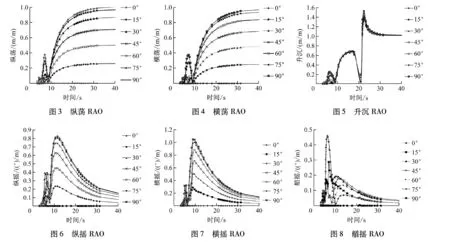
为计算平台摇荡运动的幅频响应函数RAO,需在AQWA-LINE中设置一系列波浪频率和入射方向。入射频率范围为0.05~1.90 rad/s,共设置45个波浪频率。由于平台关于xOy平面与xOz平面对称,入射方向设置为0°~90°,每隔15°取1个浪向角,共设置7个波浪方向。在AQWA中定义波浪入射角为波浪入射方向与x轴的夹角,以绕x轴逆时针方向的夹角为正,见图2。经过AQWA-LINE模块的计算,得到该平台的幅频响应函数RAO计算结果(见图3~图8)。
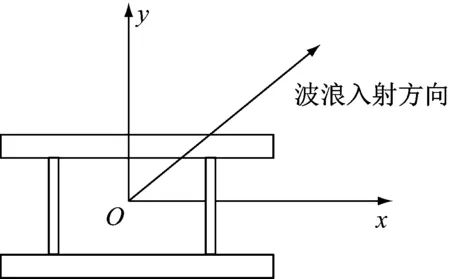
图2 AQWA波浪方向定义
3 半潜式生活平台上人员舒适性分析
3.1 确定舒适度衡量标准和最大加速度可能点
半潜式海工生活平台上居住人员的工作能力主要受平台摇荡运动的加速度的影响。加速度过大会引起人员晕船,一般晕船率随加速度的增加而增加[13]。业界曾在北欧合作项目“船舶耐波性能”中探讨过船舶舒适性的分级标准,详细列出了与不同等级的特殊类型作业和乘客舒适度相对应的摇荡运动加速度。借鉴到半潜式海工生活平台上,考虑到上述衡准仅计入垂向加速度和横向加速度的影响,增加平台纵向加速度响应的影响,可确定平台的舒适度衡量标准,具体见表2。半潜式海工生活平台符合表2中的轻型劳动等级标准。当平台的垂向加速度小于1.96 m/s2,横向加速度和纵向加速度都小于0.98 m/s2时,满足舒适性要求。

表2 半潜式海工生活平台舒适度衡量标准
在微幅波理论和平台作微幅摇荡运动的前提下,平台上任意关键位置的加速度可由重心处加速度和两者之间的相对坐标关系转换得到。
(3)
根据浮体上任一点的加速度,结合半潜式生活平台的总体布置图,可确定平台上人员经常活动的范围内最大加速度可能出现的位置。根据所得位置,结合平台的完整网格化模型,可确定最大加速度位置的坐标,在模型上标记出相应节点,具体数据见表3。
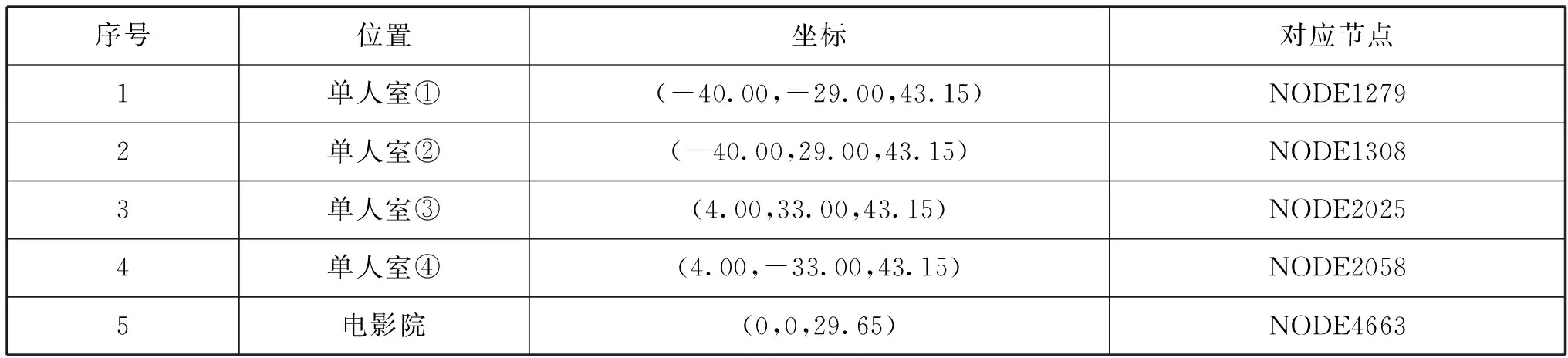
表3 最大加速度可能点数据
3.2 平台舒适度的极限波浪条件
设计一系列波高从小到大变化的JONSWAP谱作为该平台波浪的输入参数,浪向角取0°、45°和90°,在计算文件中设置表3所示的5个标记点,结合AQWA-LINE计算得到平台的运动响应RAO,利用AQWA-DRIFT对平台进行时域分析,得到平台在不同波浪条件下的加速度响应值。以垂向加速度为例,给出有义波高为13.48 m、谱峰周期为13.14 s、浪向角为45°时,单人室①(标记节点NODE1279)的垂向加速度时历结果见图9。对时历结果进行统计分析,可得到在该波浪条件下,单人室①(标记节点NODE1279)的最大横向加速度为0.548 m/s2,最大纵向加速度为0.545 m/s2,最大垂向加速度为1.890 m/s2。
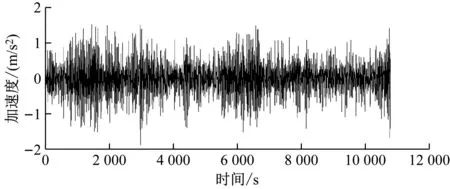
图9 平台运动的垂向加速度时历曲线(单人室①)
用波高从小到大变化的一系列JONSWAP谱作为检索平台最大波浪条件的输入谱,统计分析各标记节点的最大加速度,结合半潜式海工生活平台舒适度衡量标准(见表3)得到满足平台舒适度要求的最大波浪条件为:有义波高13.48 m;谱峰周期13.14 s。对其他关键位置作上述计算分析,即可得到3 h短期海况内,输入最大波浪条件下,平台上经常活动范围内的最大加速度值,见表4。
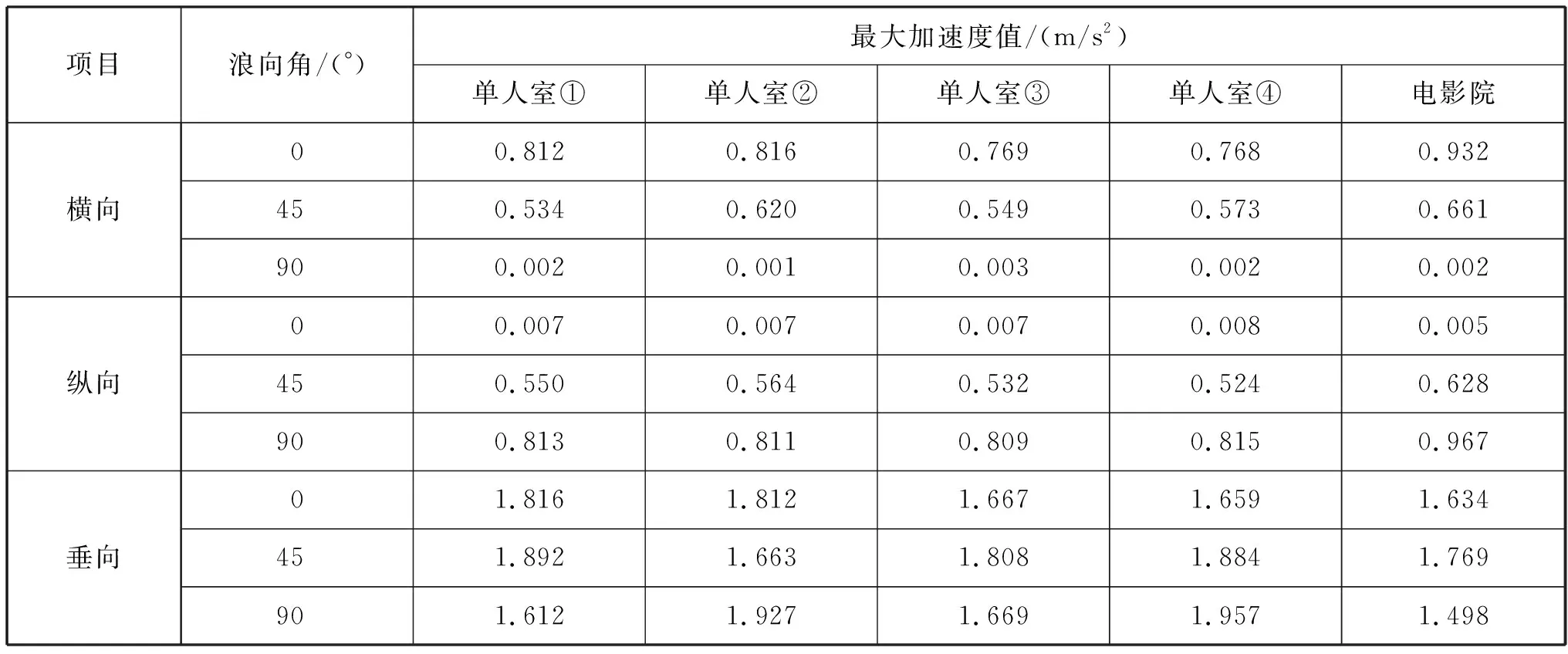
表4 最大波浪条件下平台的最大加速度值
从表4中可看出:当有义波高为13.48 m、谱峰周期为13.14 s时,该平台的舒适性满足轻型劳动等级标准的要求,平台的舒适性较好;当平台所在海域的海洋环境超过此值时,平台的舒适性将不满足轻型劳动等级标准的要求,平台的舒适性将受到影响。
4 结 语
本文以三维势流理论为基础建立半潜式生活平台的数值分析模型,研究平台在波浪中的摇荡运动,以浮体上任一点的运动公式为出发点,分析得出平台上工作人员主要活动范围内最具代表性的位置,并尝试以标记关键点的方式研究这些位置的运动响应,以此分析平台的舒适性。
本文尝试借鉴船舶舒适性分级标准,在考虑船舶横向和垂向运动加速度的基础上,考虑平台纵向加速度响应对平台舒适性的影响,建立半潜式海工生活平台舒适性衡量标准,并以此分析生活平台在不同海浪环境下的舒适性,搜索满足平台舒适性要求的最大波浪条件。本文的研究可为半潜式生活平台设计提供参考。