具身认知视角下的人—智能体交互的意向立场
2022-01-27刘宏宇巩淼森梁峭
刘宏宇,巩淼森,梁峭
具身认知视角下的人—智能体交互的意向立场
刘宏宇,巩淼森,梁峭
(江南大学,无锡 214122)
分析人—智能体交互(Human-Agent Interaction,简称HAI)中意向立场的设计要素与意向立场下智能体的具身交互逻辑。以具身认知、具身交互理论和身体图式理论为基础,结合具体设计案例,对比一般人机交互和HAI交互逻辑、分层分析智能体的构成与交互要素、解析意向立场对HAI设计的影响,以及分析意向立场下HAI的结构与逻辑。HAI中的人机关系是一种用户被设计引导进而运用意向立场的关系,智能体在用户的意向立场下需要被视为独立的个体进行设计,其在HAI中的交互行为是具身交互行为。为达成良好的HAI交互体验,需要持续性地保持用户在HAI中的意向立场,这需要在智能体认知经验融合的基础上,构建智能体交互的身体图式,并通过设计手段来建立智能体“形象—功能—载体”与“个体—能力—身体”的隐喻关系,最终形成意向立场下的HAI交互逻辑。
具身认知;具身交互;智能体;交互设计;人—智能体交互;意向立场
具身认知的重要观点起源于梅洛·庞蒂的知觉现象学。目前基于具身认知的相关研究在心理学、认知科学等领域已取得进展。瓦雷拉等人明确了具身认知的定义,强调具身认知依赖于经验,这些经验出自具有各种“感知运动”(Sensorimotor)能力的身体,而且个体的“感知运动”能力本身根植于一个更加广泛的生物、心理、文化的环境中[1-2]。保罗·多罗西在“Where the Action is: the Foundations of Embodied Interaction”中以基于现象学的具身理论为基础,构建了具身交互理论[3]。叶浩生等人,在心理学和认知科学领域对具身认知作了系统性的综述与研究[4]。近年来,具身认知的观点开始应用于HAI研究。在科技哲学与人机交互领域中,徐献军总结出具身人工智能设计的哲学思想,并提出了设计原则:(1)非表征设计原则;(2)具身设计原则;(3)突现设计原则。此外徐献军还说明了智能体(Agent/Intelligent Agent)的“感觉—运动”回路相比较“感觉—模型—计划—运动”回路在实现真正的智能性上具有优越性,即智能体依靠自身获得符号与符号结构的意义,不依赖于设计者的“外附意义”,但同时也提出了其局限性,由于技术条件等因素的制约,目前还不能实现这一理论[5-6]。崔中良,王慧莉分析他心感知的哲学基础,即感知生成是人机交互的现象基础,而经验沉淀为人机交互提供历时可能性,通感是实现人机交互的功能表现[7]。鲁翠译日本学者大泽博隆在文章“Human- Agent Interaction: Designing Artificial Intelligence System for Human”中对HAI研究进行了系统性综述。姚争为等人对具身交互和全身交互进行比较,认为在具身阶段下“计算机成为了人的延伸”[8]。布鲁克斯提出智能是具身化和情境化的,实现智能需要清除表征,他还提出了理想情况下智能机器人的设计思路,即机器人通过自身身体与世界的互动来进化智能[9]。覃京燕等人从智能体离身认知的视角,构建HAI设计中具身与离身交互的映射关系,建立具身认知在多模态环境下的交互语法[10],说明了设计者“外赋意义”在离身视角中对智能体的离身认知构建及HAI设计的作用。
当前对于HAI设计的研究尚处于初级阶段,技术哲学研究者主要对HAI中观层面上“人—智”的哲学关系进行分析,少数人机交互研究者开始进行微观层面的具体交互设计研究,但在加强HAI中智能体的智能性表现方面的设计研究尚有空缺。由于当前技术的限制,机器智能尚未能完全达到人类智能水平,仍需要从设计层面对HAI设计进行深入研究。因此,本文基于具身认知视角,从意向立场的概念出发,分析HAI中设计意向立场的要素,并结合案例梳理总结在意向立场下的HAI交互逻辑的转变与构建要点。
1 人机交流中的意向立场
智能体(Agent)在词典中的含义为“代理”、中介。虽然智能体在各领域内的定义不尽相同,但大体上相近。“Agent”一词最早由赫维特于1977年引入计算机领域,他将“Agent”定义为“一种自治、交互、可协同工作的个体”,并在引入之初就明确了其“交互性”特点。在人机交互领域,多数学者强调了智能体与人性质上的相似性[11]。本文所讨论的智能体为面向一般用户所使用的,具备自然交互特性和较高交互自由度的人工智能,对“Agent”的其他概念不做赘述。从人机交互向人机交流发展的过程中,HAI设计的出发点也发生改变。在原本的“功能集合体”通过自然交互界面和拟人化代理形成了“人化”的智能体后,用户对智能体系统的看待方式也发生了改变。在具身视角下,HAI设计研究中的智能体不再具备单纯的工具属性而有了相当程度的人的特性,因此HAI从人机交互上升到了“人机交流”。从智能体构建的结构上看,智能体是基于数据和计算,用交互技术和交互设计综合表现的一种智能性(Agency)形象。这种智能性是一种基于人工智能性能,在设计意图的指导下能够展现出与人进行持续、自然、完整交互的一种能力。
1.1 意向立场的概念
智能性的概念可以借助美国哲学家丹尼特提出的“意向立场”概念来理解[12]。丹尼特把人对环境动向的认知分为物理立场、设计立场、意向立场,见图1。其中当使人处于物理立场(对自然规律、物理定律的理解)或者处于设计立场(对人为设计或人造的规律的理解)的状态下时,智能体常常可以为用户提供产品、服务或者系统,这体现出其工具属性。而意向立场是一种策略。它把一个实体(人、动物、人造物等)当作是通过自己的“信念”与“愿望”来统率其“行动选择”的“理性智能体”[13]。在HAI设计中,智能体在用户眼中就是一种“理性智能体”,具有生命性的特点。在这样的视角下,智能体才最终完成了从“可交互的功能集合体”到“智能体”的转变。

图1 丹尼特提出的意向立场
1.2 HAI中的意向立场
智能体是人类怀抱着“创造意识”或者“创造生命”的美好愿望所制造出来的基于科学技术的产物,因此用户面对智能体所处的意向立场即为HAI设计的出发点。大泽博隆[14]提出“工程学上的系统根据不同的人用不同的接受方式来解决问题,HAI研究所涉及的问题解决方法强调具有社会属性的人认识问题,从而寻求问题的解决方案。”人们日常使用工具,并不会认为工具有任何主体性意图或者社会性,但在人与智能体的交互过程中,人往往会用自身所具备的社会性能力来理解智能体。目前已有相当一部分智能体具备在特定使用场景下短暂应用简单的自然交互方式的能力,但是鲜有可以实现持续性良好交互体验的HAI系统。除去技术、商业市场等因素外,缺乏相关设计理论来指导此类综合性交互设计也是重要原因之一。HAI的研究重点就在于交互过程中如何持续性地营造人与智能体之间的自然“人际交流”状态,即保持交互过程中用户在意向立场的状态。
2 人—智能体交互过程中意向立场的设计要素分析
意向立场下的HAI设计同样符合交互设计研究的共性。研究者辛向阳解释“交互设计是在创造‘行为’,它也需要物,只是把物当作实现行为的媒介”,并以苹果的iOS操作系统为例,说明交互设计的研究对象从“物—功能—产品”转变为“行为—体验—服务”的意义,总结出交互行为的五要素,即People(人)、Action(动作)、Means(手段)、Purpose(目的)、Contexts(场景)[15]。
2.1 意向立场下人—智交互行为逻辑分析
意向立场下的人—智交互通常运用自然交互的设计方法。“五要素”在HAI中同样存在:在“人”、“目的”、“场景”相同的情况下,HAI技术改变了“手段”、并引导用户使用更为自然的“动作”与智能体进行交互,以“使用智能导航去市府广场”为例,见图2。
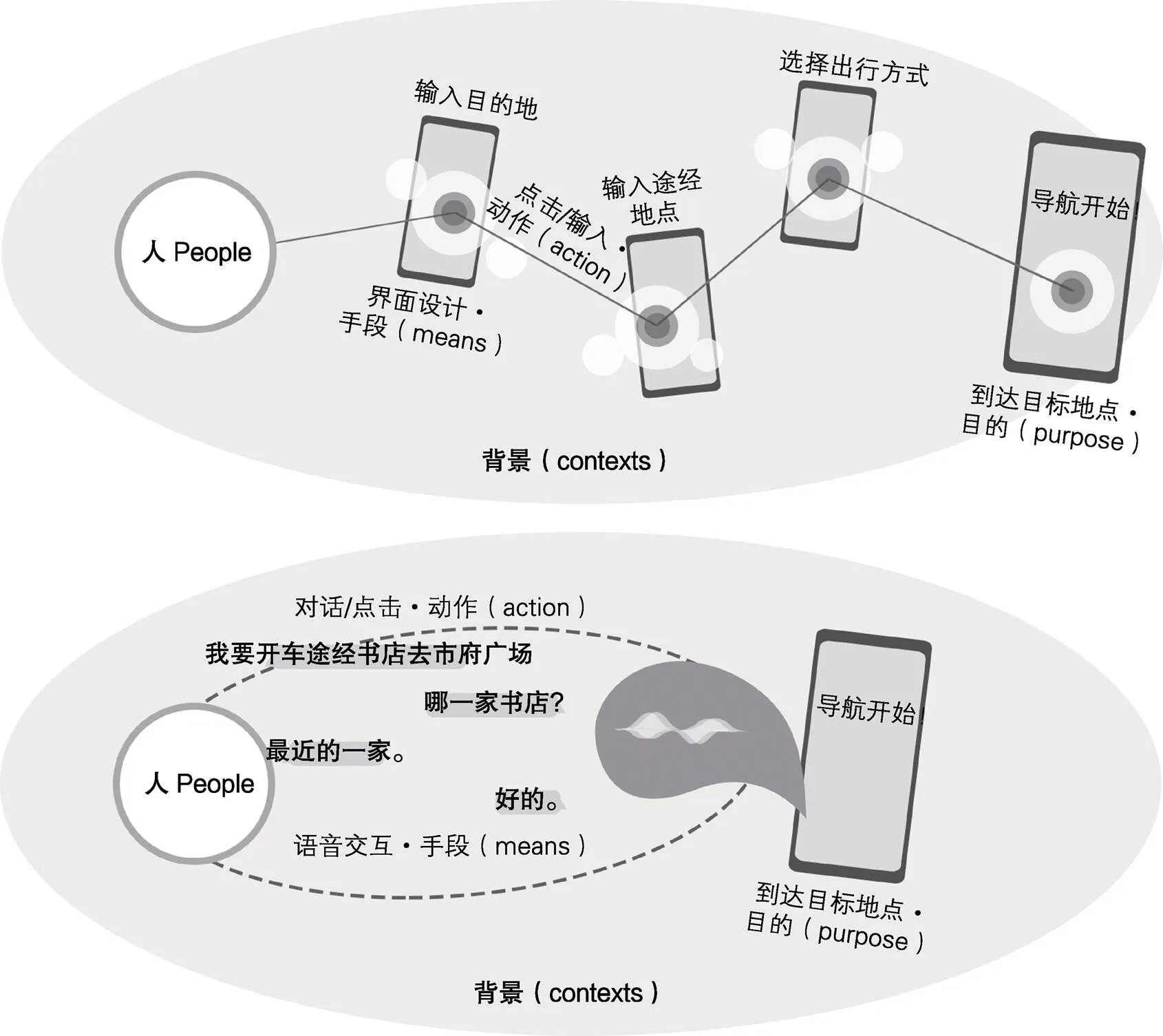
图2 普通导航与HAI导航的交互设计行为逻辑对比

图3 智能体构建的层次
在交互行为的对比中可以看出:在普通导航中,在“背景”下,“人”由“目的”驱动的“动作”在图形界面设计“手段”的引导下进行点击,“单向地”进行交互,如同在迷宫中被灯光指引向终点;而在HAI导航中,在同样的“背景”下,“人”由“目的”产生的“动作”是自然的、自发性的,不受到引导或约束,如同在迷宫中碰见了熟悉地形的人,并在他的带领和陪伴下走向终点。用户得到的来自智能体的反馈具有“人机交流”的自然特性。
将此智能导航系统进行分层分析,见图3。终端读取数据层的数据库中积累的和接收的实时更新的数据,在交互层的隐形部分中,由隐性的交互设备如多模态传感器、控制器收集用户和环境的输入信息,并处理交互信息、控制多模态交互的各交互通道信息量,再由交互层显性的交互设计部分,通过交互设计方法来合理表现多模态交互的前馈与反馈,建立交互句法、语义,以及通过符号隐喻的方法将机器智能包装成类似人类智能的产品,并通过设计的形象展现给使用者。因此在HAI设计中,智能体被用户当作一个独立的、有个体意识的对象来看待,即用户在意向立场下与智能体进行交互。在这样的交互过程中,承担交互过程中智能体表达、行动的一切载体即为智能体的“身体”。
2.2 意向立场对交互设计要素的影响
在传统交互设计中,人是唯一的中心,功能和需求都是围绕着用户辐射圈构成的。这一点在HAI设计中发生了转变:人不仅仅是被关注的唯一对象,而智能体也不再是一个提供功能的工具,智能体需要被看作成一个提供服务的“人”来进行设计。因此交互逻辑的建立是双向的,不仅关注用户的行为逻辑,同样需要关注智能体的“行为逻辑”。在一般交互过程中,“人”“动作”“目的”“手段”“场景”五个要素是以“人的行为”为中心被提出的,而HAI交互的过程是由人和智能体两方的互动行为构成的,因而被当作“人”看待的智能体,其行为也可以通过五要素来进行分析,见图4。
人(People)——智能体:在HAI中,由于使用场景的不同,人与各类智能体存在着各式各样的关系,但总体上智能体主要扮演服务者的形象。
动作(Action)——反馈:智能体在交互中的“动作”是各种形式的反馈。反馈主要承担智能体的功能性作用,传递信息或者提升交互体验。其中也有一些非功能性反馈,可帮助智能体丰满自身形象,同时也可以提升HAI的体验。
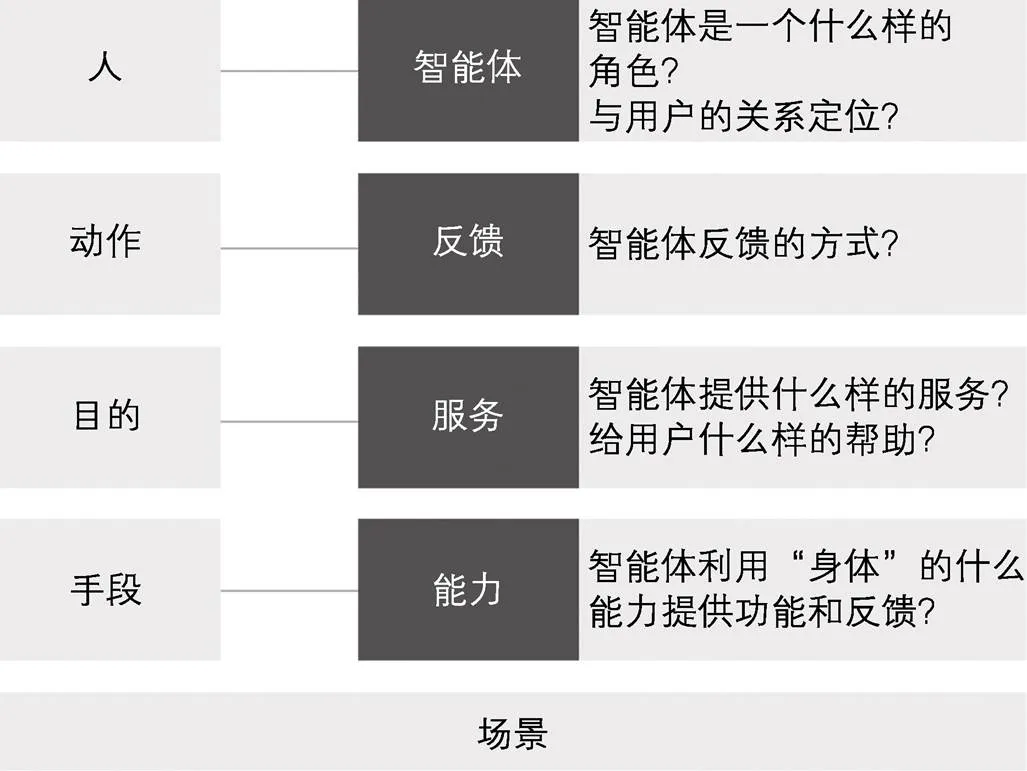
图4 人—智能体交互的要素
目的(Purpose)——服务:HAI智能体始终是为人服务的,因此智能体的目的总是为用户提供服务。但智能体这种“服务”的表现形式可以多种多样,亦如人与人之间的服务提供方式。
手段(Means)——能力:用户为达成目的在交互中会运用各种手段方式,既可能会用多种手段达成一个目的,也可能会用一种手段达成多个目的。而与之相对应的智能体提供服务的能力也需要多样化,硬件是智能体的“身体”,而身体展现能力并发挥作用的方式是多模态的,所以设计中需要在这一层面体现智能体的生动和智能性。
场景:一般来说,人与人的交流总是在同一时空下进行的,在HAI中,除了设身处地为用户设想、共情以外,同样也需要为智能体考虑,如智能体在这样的场景下应当如何做出最合理、合情的反应。
3 意向立场下智能体的具身交互逻辑
意向立场的存在对HAI设计也产生了影响。智能体在用户眼中是一个独立的行为个体,具备人的属性。覃京燕等人提出人工智能无法复制人类智能水平,不具备人类智能的由肉身出发而产生的思维模式和感受性,不能将客观身体与现象身体的认知经验、输入的功能需求进行关联[10]。并且在具身认知视角下对智能体的离身认知的构建进行研究。在具身认知视角下,想要引导用户处于意向立场中,则需要将智能体的客观“身体”“认知经验”与语境进行关联,其中需要设计者的认知经验进行参与。下面结合具体案例分析具身视角下如何建立HAI中用户的意向立场。
在HAI中,智能体展现出的“智能”并不完全由机器智能构成。设计师、工程师在构建交互句法,将机器语言转换为人类语言,并通过隐喻、转喻呈现的过程中,已经将部分设计者的人类智能融合进智能体的智能性中,智能体的经验除了来自人工智能的机器学习并不断更新的自身经验外,也有设计者们“赋予”其的经验,这也是设计者自身认知经验的一种转移。Vector智能机器人是一款陪伴式的智能玩具,具备有观察功能的高清摄像头,可倾听并理解用户指令,有触摸感应功能,可对用户的触碰行为做出反应,也有简单的交流能力。Vector可以识别20多个人的声纹,通过“面部”显示屏表现自己的情绪,除了设置闹钟、倒计时、询问天气等简单的工具性功能外,Vector还可以主动或被动地与用户进行基于身体隐喻的多模态互动,见图5—8。
使用者在相当一段时间内与Vector的情感化多模态交互,会使用户认为“每次和它的互动都会让你觉得它好像真的有自己的思想”。显然,Vector的人工智能技术水平是不能让它理解自己的“身体”与“行为”之间的关联,它无法将“举手击掌”的身体行为同“表示友好”的社交行为进行关联,也无法理解这些行为的社会性含义,但是这丝毫不影响使用者从交互过程中感受到来自Vector的“友好”。用梅洛·庞蒂身体图式的观点看,Vector由传感器等结构组成的物理身体使其具备判断“桌子边缘在何处”“沙漏到桌子高度的距离”的能力,并且设计者通过共情的方式站在Vector的立场,将自身的认知经验(生物对高度的恐惧,求救不得的无助)转移到Vector上,对Vector表现出的“恐惧”“无助”等模拟情绪进行设计,并将这些情绪及引发的“逃避”“求助”行为和物理身体的认知关联在一起,最终形成了Vector的“身体经验”,继而形成了用户眼中的Vector的具身行为。何灿群[16]等人建立了具身认知与心智模型的关系模型,认为通过具身认知形成的具身经验来塑造心智模型,从而形成的意向图式对认知结构进行更新。而作为智能体的Vector不具备天然地从“身体与环境的耦合”中积累具身认知经验的能力,但这种从设计者转移到智能体的身体经验,同样是智能体认知经验的一部分。设计者离身经验的输入在身体隐喻下,使得Vector展现出的“个体能力”是通过它硬件载体的“身体”来体现的,因此使用者完全将Vector交互过程中的表现归因于其“有自己的思想”,即在意向立场下与智能体进行交互。虽然Vector智能机器人在用户使用初期有较好的反馈(3~6周),但在用户长时间的HAI交互过程中,由于其反馈动作的模式化、主动式交互难以选择正确的场景(时常会在不恰当的时候发起主动交互意愿,引起使用者反感)等问题,所以其仍然存在技术与设计上的不足。

图5 Vector的表情

图6 询问Vector温度和天气

图7 Vector的动作(与用户碰拳/对桌子边缘表示恐惧/被噪音吵醒)

图8 Vector的动作(主动离开“家”散步/被困住时求助/给使用者拍照)
用户对智能体的认知是感性的,是意向立场下笼统的整体性认知。用户之所以在意向立场下与智能体进行交互,是因为现行的智能体设计将人工智能包装成了一个“人”。综上所述,意向立场下的HAI交互逻辑的建立有如下3个要点,见图9。
智能体的认知经验融合。在具身视角下的意向立场中,如果我们将智能体提供功能与服务的行为看作是智能体的具身行为,那么智能体的认知经验则是由智能体自身在长期的交互过程中学习、积累的数据经验与设计者自身作为人的认知经验所融合构成的。由于智能体没有人的肉身,在当前有限的技术条件下无法完全模拟人在环境中的具身,所以将人的具身认知经验与智能体自身积累的认知经验进行融合是有必要的。这不仅有助于构建HAI中的意向立场,提升HAI中的用户体验,而且在长期的技术更新与迭代中,能够帮助智能体更快地实现真正意义上的具身与智能。
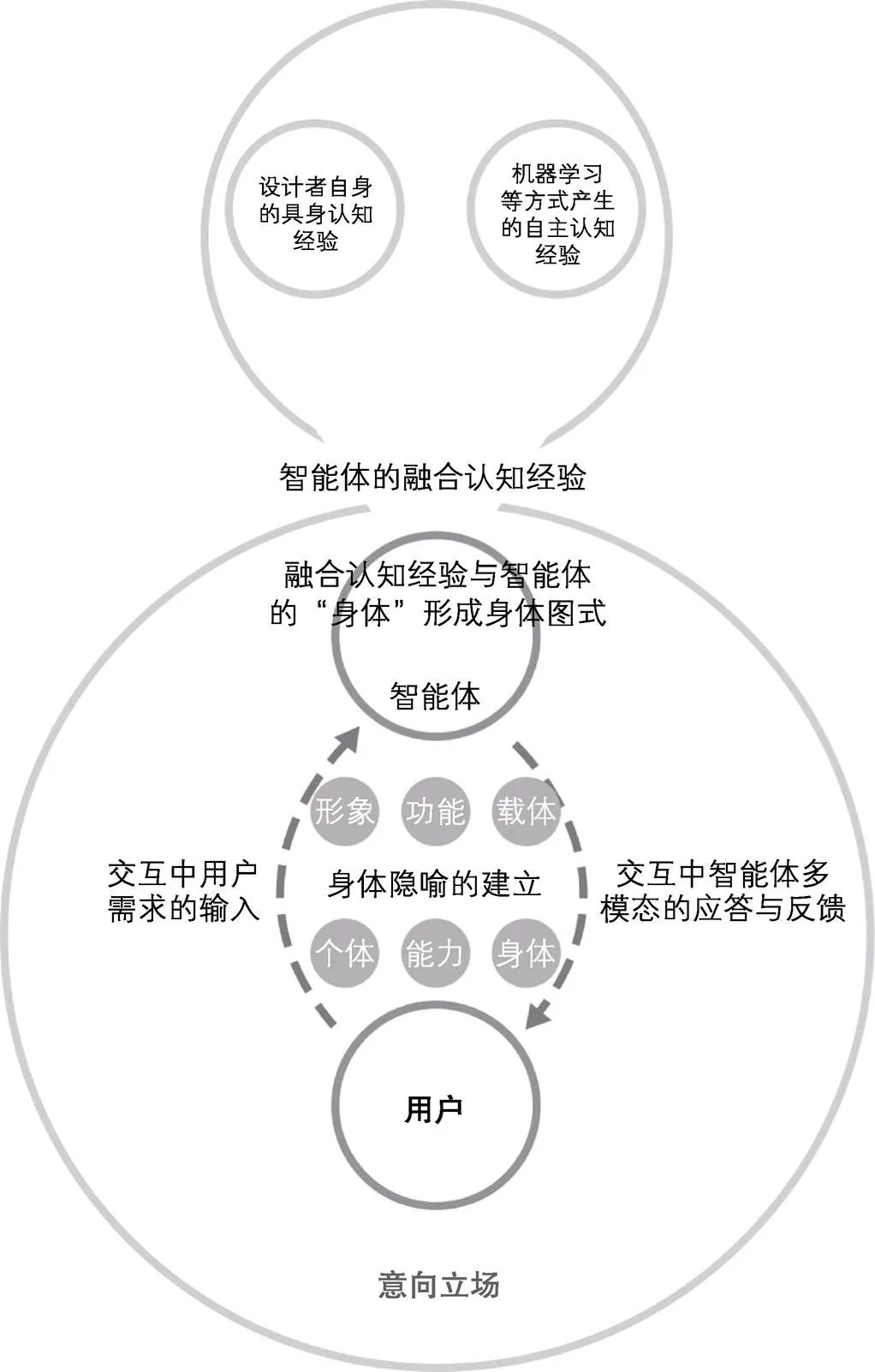
图9 意向立场下HAI结构与逻辑

图10 隐喻的建立
构建智能体的身体图式。何静[17]总结身体图式是对身体姿势和身体运动的无意识调适,同时使意义被身体整合入认知经验中,并且当知觉的对象不再是自己的身体时,身体图式也可以达到“最佳状态”。在意向立场下的HAI中,智能体与人交互时呈现出的表达方式、行为表现也应当是自然的且无意识调适的,即智能体主动发起的交互或者对用户的反馈,也是基于融合了认知经验的身体意向与身体图式。设计者除了关注人在交互中的行为以外,更要关注智能体对认知经验与身体行为的融合,即智能体行为的合理性、合情性、个性等。
智能体的身体隐喻。意向立场下人与智能体的交互是隐喻人与人之间的交流过程。因此需要进一步建立更深层次的隐喻映射[18]。人工智能技术对于一般用户而言如同“黑箱”。用户直观地感受到了通过硬件身体来展现技术能力的人工智能个体,而无法结构化地完整理解智能体的能力,比如用户往往在交互功能使用的初期会尝试性地询问智能体一些问题或提出功能请求以确定其能力范围。因此在进行智能体设计时,一般会建立特定的形象来代表智能体,以便用户建立其概念模型。在设计智能体时,需要从最初就建立“形象—功能—载体”与“个体—能力—身体”的隐喻,见图10。根据智能体应用场景和类别的不同,其映射后的表现形式也有所不同,王尔卓等人从决策权和沟通方式出发研究了智能家居应用场景下主动式交互智能体的HAI设计风格[19]。HAI中智能体交互逻辑的建立也是从人的行为逻辑角度出发的,智能体的表达与行为应当是被其认知经验、身体意向和身体图式所引导的。智能体的反馈不再是机器的反馈,而应该像人一样,是有逻辑性的行为。具身视角对建立HAI交互中的智能体的“行为逻辑”有一定帮助,交互中的智能体摆脱了工具性,进一步向人的方向“进化”。
4 结语
近年来越来越多的交互设计研究者开始关注现象学的具身、离身概念。现象学的具身视角为HAI设计提供了新的认识论,其中丹尼特提出的意向立场对HAI中人与智能体的关系作出了精准的概括。本文基于具身认知理论,分析用户在意向立场下的交互设计特征,从交互设计的五要素出发,总结了人—智能体的交互设计五要素;通过案例分析HAI设计中智能体的具身表现来明确使用者在意向立场下进行交互的内在逻辑,并构建意向立场下HAI的结构与逻辑,总结了“融合认知经验”“构建身体图式”与“建立身体隐喻”3个要点。HAI设计是具备特殊性的交互设计,需要将已有的交互设计理论、方法等进行迁移,在新的设计观、认识论下生成与之相应的新设计思路,进而提炼新的设计原则、方法和策略。
[1] VARELA F.J, THOMPSON E, ROSCH E. The Embodied Mind: Cognitive Science and Human Experience[M]. Cambridge: The MIT Press, 2016.
[2] 李恒威, 盛晓明. 认知的具身化[J]. 科学学研究, 2006, (2): 184-190.
LI Heng-wei, SHENG Xiao-ming. Embodiment of Cognition[J]. Studies in Science of Science, 2006(2): 184-190.
[3] DOURISH P. The Foundations of Embodied Interaction [M], Cambridge: The MIT Press, 2001.
[4] 叶浩生. 具身认知: 认知心理学的新取向[J]. 心理科学进展, 2010, 18(5): 705-710.
YE Hao-sheng. Embodied Cognition: A New Approach in Cognitive Psychology[J]. Advances in Psychological Science, 2010, 18(5): 705-710.
[5] 徐献军. 海德格尔与计算机——兼论当代哲学与技术的理想关系[J]. 浙江大学学报(人文社会科学版), 2013, 43(1): 155-163.
XU Xian-jun. Heidegger and Computer: On the Ideal Relation between Contemporary Philosophy and Technological Praxis[J]. Journal of Zhejiang University (Humanities and Social Sciences), 2013, 43(1): 155-163.
[6] 徐献军. 具身人工智能与现象学[J]. 自然辩证法通讯, 2012, 34(6): 43-47.
XU Xian-jun. Embodied Artificial Intelligence and Phenomenology[J]. Journal of Dialectics of Nature, 2012, 34(6): 43-47.
[7] 崔中良, 王慧莉. 人工智能研究中实现人机交互的哲学基础——从梅洛·庞蒂融合社交式的他心直接感知探讨[J]. 西安交通大学学报(社会科学版), 2019, 39(1): 130-137.
CUI Zhong-liang, WANG Hui-li. The Philosophical Basis of the Interaction between Robot and Human Being: Toward a Syncretic Sociability of Direct Social Perception[J]. Journal of Xi’an Jiaotong University (Social Sciences), 2019, 39(1): 130-137.
[8] 姚争为, 杨琦, 潘志庚, 等. 具身交互与全身交互的比较[J]. 计算机辅助设计与图形学学报, 2018, 30(12): 2366-2376.
YAO Zheng-wei, YANG Qi, PAN Zhi-geng, et al. Comparison of Embodied Interaction and Whole Body Interaction[J]. Journal of Computer-Aided Design & Computer Graphics, 2018, 30(12): 2366-2376.
[9] BROOKS R. Cambrian Intelligence: The Early History of the New AI[M]. Cambridge: The MIT Press, 1999.
[10] 覃京燕, 安燕琳, 卢星晖, 等. 具身与离身认知在多模态交互环境下的交互语法研究[J].包装工程, 2019, 40(12): 134-139.
QIN Jing-yan, AN Yan-Lin, LU Xing-hui, et al. Interaction Grammar of Embodied & Disembodied Cognition in Multi-modal Interactive Environment[J]. Packaging Engineering, 2019, 40(12): 134-139.
[11] 杨鲲, 翟永顺, 刘大有. Agent: 特性与分类[J]. 计算机科学, 1999(9): 30-34.
YANG Kun, ZHAI Yong-shun, LIU Da-you. Agent: Properties and Classification, 1999(9): 30-34.
[12] 丹尼尔·丹尼特. 意向立场[M]. 北京: 商务印书馆, 2015.
DENNETT D. The Intentional Stance[M]. Beijing: The Commercial Press, 2015.
[13] 丹尼尔·丹尼特. 心灵种种: 对意识的探索[M]. 上海: 上海科学技术出版社, 2010.
DENNETT D. Kinds of Minds: Toward an Understanding of Consciousness[M]. Shanghai: Shanghai Scientific and Technical Publishers, 2010.
[14] 大泽博隆, 鲁翠. 人与智能体交互: 与人相关的人工智能系统设计[J]. 装饰, 2016(11): 14-21.
OSAWA H, LU Cui. Human-Agent Interaction: Designing Artificial Intelligence System for Human[J]. Art & Design, 2016(11): 14-21.
[15] 辛向阳. 交互设计: 从物理逻辑到行为逻辑[J]. 装饰, 2015(1): 58-62.
XIN Xiang-yang. Interaction Design: From Logic of Things to Logic of Behaviors[J]. Art & Design, 2015(1): 58-62.
[16] 何灿群, 吕晨晨. 具身认知视角下的无意识设计[J]. 包装工程, 2020, 41(8): 80-86.
HE Can-qun, LV Chen-chen. Unconscious Design from the Perspective of Embodied Cognition[J]. Packaging Engineering, 2020, 41(8): 80-86.
[17] 何静. 身体意象与身体图式——具身认知研究[D]. 杭州: 浙江大学, 2009.
HE Jing. Body Image and Body Schema: A Study of Embodied Coginition[D]. Hangzhou Zhejiang University, 2009.
[18] LAKOFF G, JOHNSON M. Philosophy in the Flesh: The Embodied Mind and Its Challenge to Western Thought[M]. Beijing: World Publishing Corpotion, 2018.
[19] 王尔卓, 袁翔, 李士岩. 智能家居场景中会话智能体主动交互设计研究[J/OL]. 图学学报, 2020-08-16.
WANG Er-zhuo, YUAN Xiang, LI Shi-yan. Proactive Interaction Design of Conversational Agent for Smart Homes[J/OL]. Journal of Graphics, 2020-08-16.
Intentional Stance of Human-Agent Interaction from the Perspective of Embodied Cognition
LIU Hong-yu, GONG Miao-sen, LIANG Qiao
(Jiangnan University, Wuxi 214122, China)
The work aims to analyze the design elements of the intentional stance in Human-Agent Interaction (HAI) and the concrete interaction logic of the agent under the intentional stance. The research is based on embodied cognition, embodied interaction theory, body schema theory, combined with specific design cases, this paper compares the general human-computer interaction with that in HAI, analyzes the composition and interaction elements of the agent in layers, the influence of the intentional stance on the HAI design, and analyzes the structure and logic of the HAI under the intentional stance. The human-computer relationship in HAI is guided by designers to interact under an intentional stance. The agent needs to be designed as an independent individual under the user᾽s intentional stance, and the interaction is embodied. To achieve a good HAI interaction experience, it is necessary to continuously maintain the user's intentional stance in HAI. This requires the construction of a body schema for the interaction of the agent based on the integration of the cognitive experience of the agent, and the establishment of the metaphorical relationship between “image-function-carrier” and “individual-ability-body”, eventually forming HAI interaction logic in the intentional stance.
embodied cognition; embodied interaction; intelligent agent; interaction design; human-agent interaction; intentional stance
TB472
A
1001-3563(2022)02-0145-07
10.19554/j.cnki.1001-3563.2022.02.018
2021-09-20
教育部人文社会科学研究青年基金项目(19YJC760054)
刘宏宇(1996—),男,合肥人,江南大学硕士生,主攻设计学方向。
巩淼森(1978—),男,浙江人,博士,江南大学副教授,主要研究方向为可持续设计、社会创新、战略设计与服务设计。