基于Logistic-Fisher的老龄陪伴机器人外观形态评价方法
2022-01-27王秋惠张倩男
王秋惠,张倩男
基于Logistic-Fisher的老龄陪伴机器人外观形态评价方法
王秋惠1,2,张倩男1
(1.天津工业大学 机械工程学院,天津 300387;2.天津工业大学经济与管理学院,天津 300387)
提出一种基于眼动追踪的老龄陪伴机器人的外观形态评价方法。首先借助眼动实验,获得老年人观看陪伴机器人时的眼动特征,提取眼动指标、心率指标与被试变量,利用SPSS23.0软件平台对变量信息进行描述统计和二元Logistic回归分析;其次根据老年人的生理和心理的特殊性将老龄陪伴机器人的外观形态评价定义为二分类问题,以影响显著性最强的几个因子作为判别因子建立Fisher判别函数模型,并进行实验验证。性别、年龄、文化程度、心率指标均对陪伴机器人外观关注度无显著影响;总注视时间对其产生显著负向影响,平均注视时间、注视次数产生显著正向影响,判别模型预测样本与实际样本相比准确度为91.0%。Logistic-Fisher方法准确度较高,为构建老龄陪伴机器人的外观形态设计评价体系提供了一种可行的技术途径。
老龄陪伴机器人;外观评价;眼动跟踪;二元Logistic回归;Fisher判别模型
在中国老龄化的背景下,全社会养老负担日益加重[1],老年人作为特殊群体,受到了社会的广泛关注。由于子女经常不在身边,以及照顾老年的劳动力相对短缺,老龄服务问题已成为我国迫切需要研究解决的重大课题之一,而智慧养老则成为解决这一问题的有效途径。养老智慧平台系统、智能家居、养老机器人等智慧产品的开发,能够满足多样化需求,为老年人提供方便、高效、高质量的生活[2]。因此,通过智能机器人代替人来从事老年照顾服务有着广阔的市场前景[3]。老龄陪伴机器人作为智能机器人的一种,能够给予老年人陪伴及日常照顾,并作为商品出现在消费市场中。为了能够从众多竞争品中迅速吸引消费者注意力,产品外观形态则成为了能够激发用户产生期望及使用意向的重要指标[4]。因此,外观造型是主要决定因素。陪伴机器人能否被老年人接受且喜爱很大程度上取决于其造型设计能否符合消费者的需求。有学者对老龄机器人的外观形态问题进行了研究,其中杨悦[5]等结合质量功能展开(QFD)方法和粗糙层次分析(RAHP)方法将餐馆服务机器人的用户需求转化为可用的设计参数;朱彦[6]用感性工学结合层次分析法对家庭服务机器人形态的感性认知进行系统量化分析,提出新的家庭服务机器人的外形设计;YA-HUEI W[7]等通过焦点小组的方法探索老年人对机器人外貌的感知;DEUTSCH I[8]等通过对老年人深度访谈探索其关于机器人外形的态度和关注度,王秋惠[9-10]等在康复机器人界面设计、老龄服务机器人界面等领域进行了深入研究。
尽管上述学者从不同层面提出了老龄服务机器人的外观造型设计方法,但是这些方法仍存在以下不足:(1)虽然产品造型可以通过意象词汇来进行定量化,但它是用户基于平时的认知对产品进行的一种模糊性描述,这种主观性的评价因具有个体差异,并不能很好地描述产品外观形态的好坏;(2)老年人认知弱化,审美比较直截了当,更注重陪伴机器人外观形态的直观感受,判定偏向于两极化,即好看与不好看,目前并没有很多文献针对老年人简单的造型喜好判断做相关研究。
针对上述问题,本文提出一种基于眼动追踪的老龄陪伴机器人外观形态评价方法,建立以眼动与心率为主的代表性指标体系。运用二元Logistic回归对其进行定量化处理,确定外观形态因素对机器人设计偏好影响的权重,得到与老年人关注度显著性最强的指标因子。在老年人认知审美方面,将老龄陪伴机器人外观形态评价定义为二分类问题,建立判别函数,以及客观性标准,为日后老龄陪伴机器人的外观设计提供技术支持及理论实践依据。
1 理论与算法
1.1 二元Logistic回归分析
本文使用二元Logistic回归模型将影响老年人对陪伴机器人关注度的指标因子进行定量分析,它是一种对二分类因变量进行回归分析时经常采用的非线性分类统计方法[11-12],刘荣辉[13]等学者建立Logistic回归模型以改进反映家庭成员关系的边权模型,姜广辉[14]等使用Logistic回归模型对北京山区农村居民点变化的内部及外部驱动力进行深入分析。其中“二元”指因变量为二分类变量,在本实验中为“关注度高”和“关注度低”,Logistic指对目标概率进行Logit变换[15]。设为二分类因变量,取值“1”代表关注度高,“0”代表关注度低,自变量(i)为各指标因子值。记关注度高的条件概率为,对进行Logit变换,公式如下:
(1)
则Logistic线性回归模型如下:
(2)
式(2)中:0为截距,1,…,β为回归系数,即代表的是各指标因子的相对贡献率。如果系数为正,则对应因子和老年人关注度呈正相关;反之,系数为负,则因子和老年人关注度呈负相关。各指标因子对关注度结果影响越显著,表明其在老年人对陪伴机器人外观偏好的影响程度越大。
1.2 Fisher判别
Fisher判别分析借助投影的方式对样本进行降维,把多维数据点投影在一条直线上,见图1。这样可以最大限度地缩小同类样本的距离,同时扩大不同类样本间的距离,使得两类样品的差异得以显著区分,尤其适用于二分类判别分析,且最优方向的投影线,需要通过样本训练得到[16]。清华大学的卢兆麟等提取热点图颜色特征和灰度直方特征,将其作为判别因子建立Fisher判别函数模型,提出新的汽车造型评价方法。李长兴[17]等为有效对煤与瓦斯突出进行预测,建立了Fisher逐步判别分析模型。
令={1,2,…,x}为属性集,在维向量中描述为=((1),(2),…,(x)),属性的范围被称为特征空间[18]。对原始数据统一处理,得出维空间下的样本均值向量,将其变换到1维空间后的均值向量为M:
(3)
图1 Fisher判别法基本原理
Fig.1 Basic principle of Fisher discriminant
式(3)中,n为样本个数,样本组内离散度为,计算如下:
(4)
Fisher判别的准则函数如下:
(5)
公式(5)得出的即为Fisher判别函数的线性判别式,也是最佳解向量。
1.3 基于Logistic-Fisher的老龄陪伴机器人外观形态评价方法
建立Logistic-Fisher判别模型的主要步骤如下。
1)挑选实验样本,做眼动实验。
2)提取眼动与心率数据并建立眼动数据与心率指标体系。
3)对指标因子进行二元Logistic回归模型构建。
4)得出对关注度结果影响最显著的指标因子。
5)将得出的指标因子作为判别因子建立Fisher判别模型,经过样本训练,得到最后的Logistic-Fisher判别模型。
基于Logistic-Fisher的老龄陪伴机器人外观形态评价方法流程见图2。
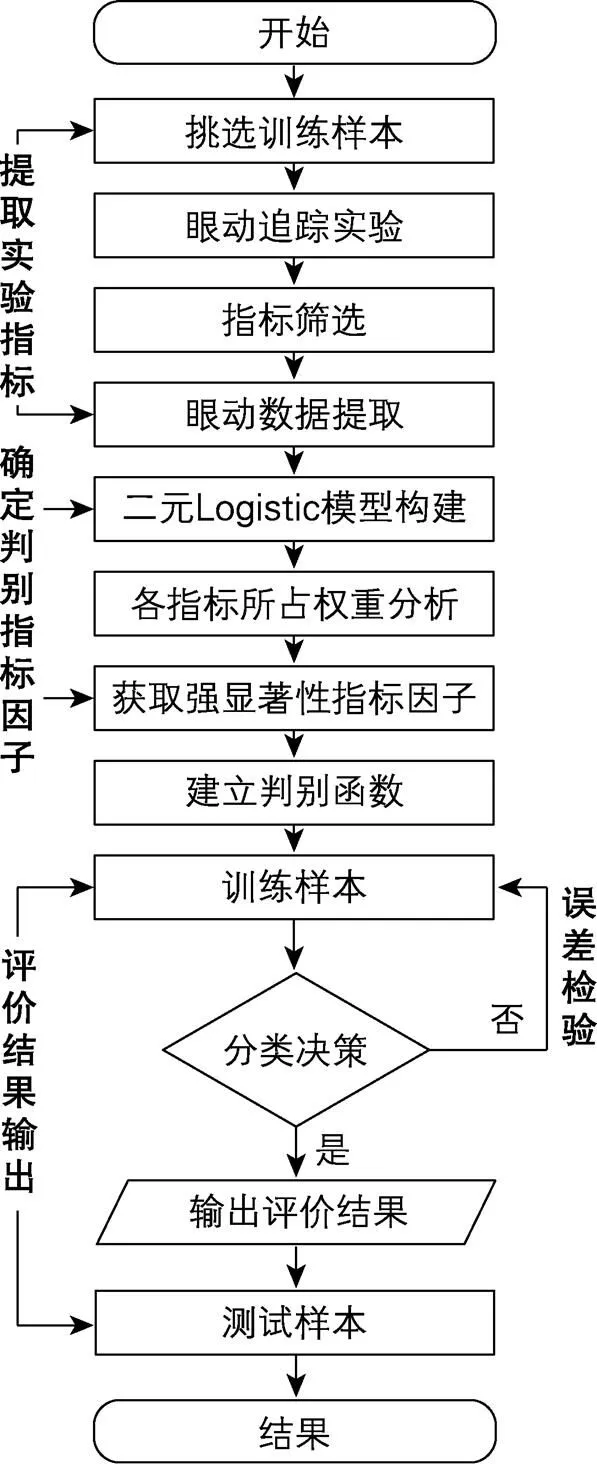
图2 基于Logistic-Fisher的老龄陪伴机器人外观形态评价方法流程
2 老龄陪伴机器人外观形态评价的Logistic-Fisher判别模型
2.1 确定评价指标
2.1.1 指标因子分析与提取
1)眼动指标。眼动指标主要分为图画知觉指标(直观性指标)与统计分析指标(基本指标与合成指标),图画知觉指标主要包括热点图、轨迹图、峰值图、视频回放;统计分析指标主要包括注视类、眼跳类、凝视时间、扫描路径等,见图3。本文采用第一次注视时间、首次注视时长、总注视时间、平均注视时间、注视次数、第二注视时间作为眼动数据指标。其中,平均注视时间越长,表明产品越能引起注意或信息越不易被解读;总注视时间越长,表明目标产品需要更多信息来进行解读或更吸引人,即产品对于老年人的吸引度越高。
2)心率指标。心率变异性(HRV)可以反映连续R-R间隔之间的细微变化。目前,HRV被认为是反映自主神经对心律调控的一种简单且无创的有效指标[19]。常用心率指标一般分为时域分析法指标和频域分析法指标,时域分析法指标主要包括24 h正常窦性RR间期总体标准差(SDNN)、正常相邻窦性RR间期差值均方根(rMSSD)、RR间期平均值标准差(SDANN)、正常RR间期的标准差(SDNNI)、相差>50 ms相邻RR间期的总数(NN50)[20-21]等;频域分析法指标主要包括超低频(ULF)、极低频(VLF)、低频(LF)和高频(HF)[22-23]。本文采用24 h正常窦性RR间期总体标准差(SDNN)作为心率数据指标,可以看出老年人对于感兴趣和不感兴趣的图片的即时反映。
3)被测试者变量指标。为探究老年被测试者的不同程度的持续性特征差异对于老年陪伴机器人的外观喜爱程度是否有影响,本文将性别、年龄、文化程度列入指标因子群当中,因所有被测试者均在家中居住,故居住情况不被列入本次指标群中。
2.1.2 面向老年群体陪伴机器人外观的样本分类
老龄陪伴机器人外观评价本质上是样本分类问题,即通过实验或日常审美认知,将陪伴机器人外观形态分为类似“好”“一般”“差”的评级。由于老龄产品的“老龄”功能被过度标榜,所以使老年人的外形需求等逐渐被忽视[24]。在实际生活中,老龄群体的视觉、记忆、推理等能力都会随年龄增加而下降[25],审美评价单一直观,因此可将研究对象分为两类,即二分类问题[26]。例如,将陪伴机器人外观形态分为两类,“好看”的为一类(1),“不好看”的为另一类(2);其次可对两类外观形态进行比较,归纳出适合老年人群体认知审美的设计方法,有助于后续老龄陪伴机器人外观形态评价进行预测分析。建立面向老年群体陪伴机器人的外观形态线性判别函数,计算如下:

图3 眼动指标分类
(6)
公式(6)中,()为判别值;1,…,X为基于眼动追踪与心率测试的老龄陪伴机器人外观形态的几项评价指标,即为本方法中前期二元Logistic回归得出的强显著性指标因子;1,…,ω为判别系数,即各指标相应权重;0为常量。对于陪伴机器人二分类问题判别,采取以下决策规则:
(7)
2.1.3 进行眼动追踪实验
本文将老龄陪伴机器人分为“好看(1)”和“不好看(2)”两类。从企业官网、相关产品图册等途径搜集到68个样本,通过多元尺度和聚类分析,并根据专家组的意见来对其进行提炼,主要划分为4类代表性陪伴机器人,如果划分类别单一,则不能完全表述老年人对陪伴机器人外观形态的评价结果,见图4。具体分为真人型、宠物型、拟人型、拟物型。并通过不同排版处理来产生32张刺激样本图片。被测试者共18名,其中男性7人,女性11人,平均年龄70岁,居住环境皆在家中,文化水平为小学毕业及以下6人,初中毕业5人,高中毕业2人,中专毕业4人,大学毕业1人。
本实验使用中国津发科技公司生产的Tobii Pro X3-120眼动追踪仪进行实验,其采样率120 Hz,该眼动仪通过双眼采集,以及明瞳和暗瞳结合的方式来进行追踪。将眼动仪安装在14英寸DELL笔记本电脑显示器下方,实验开始前,每位被测试者都阅读了知情同意书并签字,测试前对每位被测试者分别进行调校。为老年人穿戴眼动传感器及脉搏传感器,采用正确坐姿并与显示器保持平视,视距为60 cm,分别让其观察32张图片,每张图片刺激时长为10 s,每位老人完成全部测试任务预计时间为10 min。眼动及心率数据由ErgoLAB V3.0软件进行统计处理。
眼动实验测试后,对每位老年人进行问卷调查,问题为“您是否喜欢这款机器人的外观形态”,答案为“喜欢”与“不喜欢”两项选择,同时也是“关注度高”与“关注度低”的直接反映。
2.2 二元Logistic回归分析
提取上述实验中8款老龄陪伴机器人外观形态指标数据,共18位老年人,144组数据,分析各指标因子对老年人关注度高低的影响情况,将老年人关注度高取值为“1”,老年人关注度低取值为“0”。首先对模型整体有效性进行分析,见表1。表中模型检验的原定假设为:放入自变量两种情况的模型质量是否均一致;因<0.05,说明拒绝原定假设,即说明本次构建模型时,放入的自变量具有有效性,因而模型构建有意义。

图4 选取训练样本

表1 二元Logistic回归模型似然比检验结果
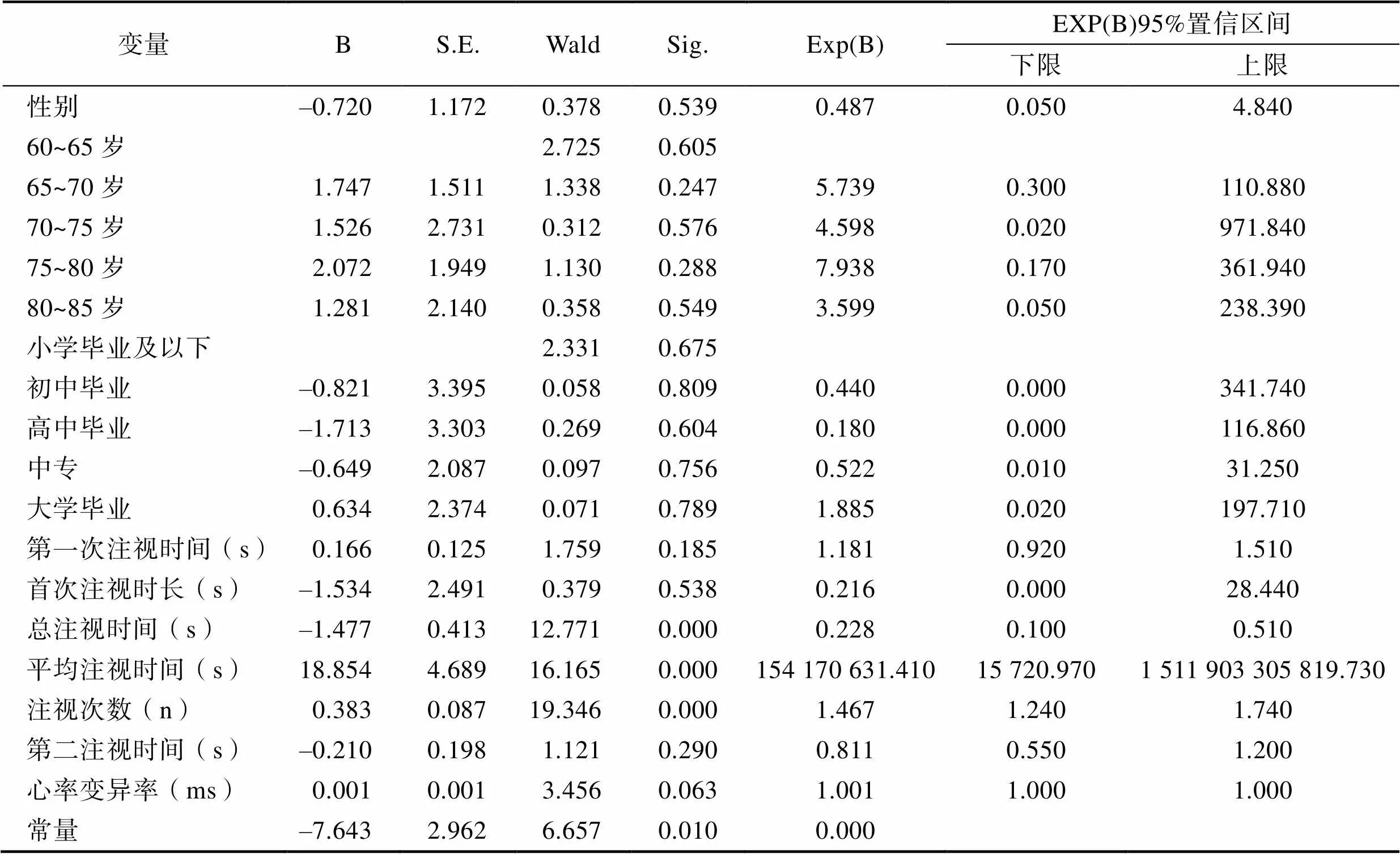
表2 二元Logistic回归模型变量参数
注:B为回归系数;S.E为标准差;Wald为Wald卡方值;Sig.为显著性;EXP(B)为置信区间
为了得出显著性最强的几项指标因子,本文利用二元Logistic回归分析,回归结果,见表2。可见,性别(=0.539>0.05),并没有呈现出显著性表现,意味着性别并不会对关注度产生影响关系;年龄分为5个级别(60~65岁、65~70岁、70~75岁、75~80岁、90~85岁),将其按无序多分类变量作哑变量处理,各级别都和其中的第一个级别(60~65岁)进行比较,均无显著影响。同理,文化程度作相同哑变量处理,也均无显著影响。同样,第一注视时间(=0.185> 0.05)、首次注视时长(=0.538>0.05)、第二注视时间(=0.290>0.05)、心率变异率(=0.063>0.05)都不会对关注度产生影响。
总注视时间的回归系数值为–1.477,并且呈现出0.01水平的显著性(=0.000<0.01),意味着总注视时间会对关注度产生显著的负向影响。优势比(Exp(B)值)为0.228,意味着当总注视时间增加一个单位时,关注度的变化(减少)幅度为0.228倍。同理,平均注视时间(=0.000<0.01)、注视次数(=0.000<0.01)会对关注度产生显著的正向影响。
结果表明,总注视时间、平均注视时间、注视次数三项指标与老年人对于陪伴机器人外观形态关注度的影响关系显著性最强,并作为判别因子1、2、3在后期建立判别模型。
2.3 判别函数模型的建立与检验
2.3.1 建立判别函数模型
将二元Logistic回归分析得出的1(总注视时间)、2(平均注视时间)、3(注视次数)作为训练样本的Fisher判别指标因子输入SPSS中的Fisher判别模型,18位老年人为训练样本(Train),另找两位老年人为测试样本(Test),见表3。变量共提取了一个判别函数,特征值(即组间平方和与组内平方和之比)为1.005,典型相关系数为0.708,且可以解释100%的方差,因此说明一个判别函数就足够了。在对判别函数是否有效的检验中,得出sig小于0.05,说明提取的判别函数有效,可以使用,见表4。Fisher判别函数系数见表5。

表3 Fisher判别函数信息

表4 Fisher判别函数有效性检验结果

表5 Fisher判别函数系数
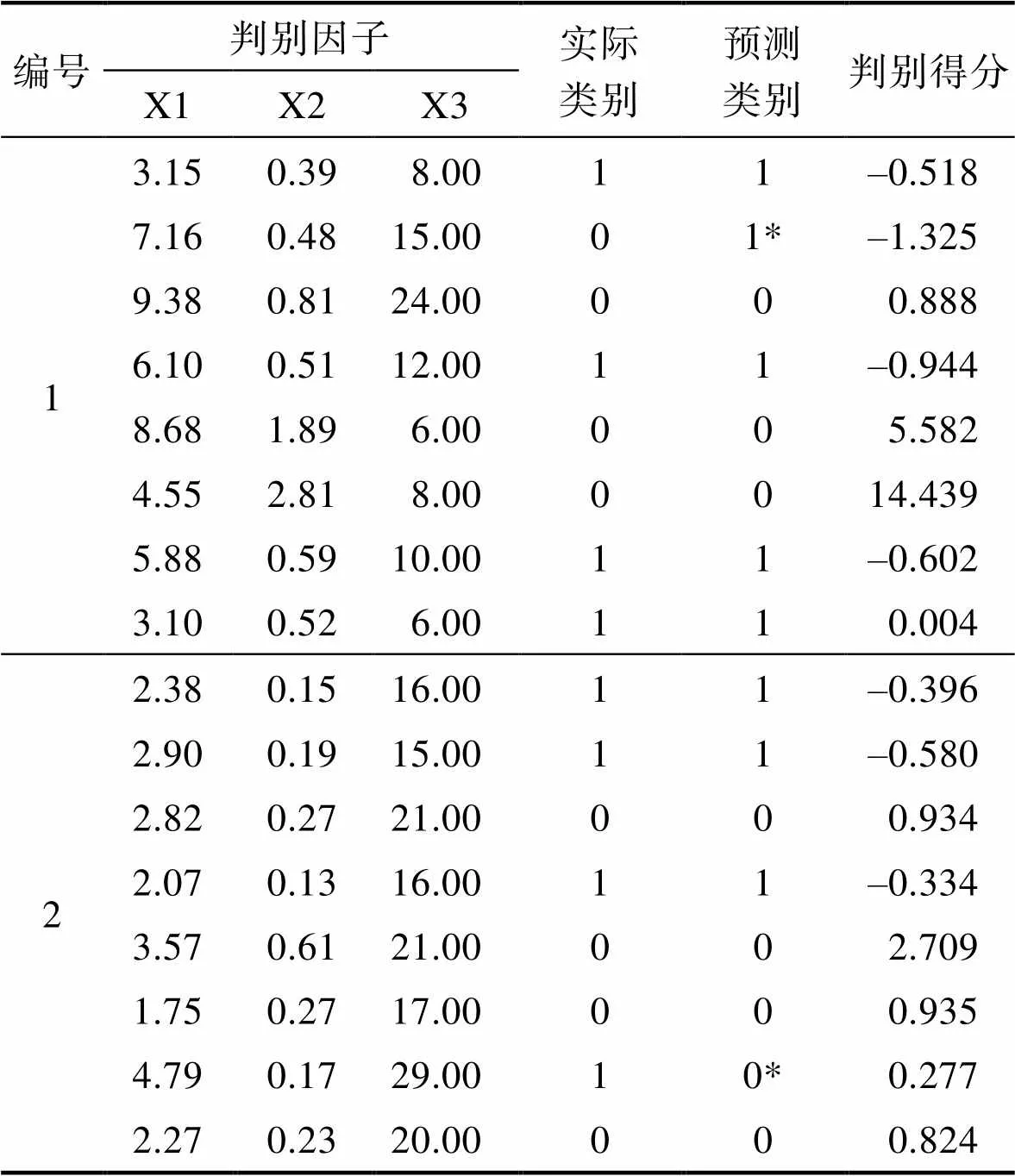
表6 测试样本预测结果
注:*为误分类个案
经计算得到其判别函数的系数及常量,最终Fisher判别函数计算如下:
(8)
2.3.2 判别函数模型检验
为了检验建立的Logistic-Fisher判别分析模型的有效性,请18名被测试者作为训练样本进行判别模型计算,并选取另外两名老年人对上述函数模型进行检验,见表6。将调查问题进行简化,以获得判别函数在老年人群体二分类问题上的直观表现。

表7 Fisher判别函数分类结果
注:正确分类的91.0%个原始已分组个案
Fisher判别函数分类结果见表7,待测样本的预测结果与实际测评结果情况比较相符,判别的正确率为91.0%,表明Logistic-Fisher判别模型具有较高的可信性。因此,可认为基于Logistic-Fisher的老龄陪伴机器人外观形态判别模型的正确率较高,比较可靠,可以运用到实际的老龄陪伴机器人的外观设计中。
3 结语
为更好地设计出符合老年人喜爱的老龄陪伴机器人的外观形态,本文以眼动追踪技术为基础,构建Logistic-Fisher判别模型。将18组老龄用户眼动数据作为训练样本,2组用户数据作为测试样本,对老龄陪伴机器人外观形态评价模型进行预测,得到以下结论。
1)本文运用二元Logistic回归模型,探究影响老龄陪伴机器人外观形态设计的显著因子。对眼动实验数据进行提取,得到8个眼动、心率变异性、被试变量等初始因子,再通过二元Logistic回归对其进行分析,得出1(总注视时间)、2(平均注视时间)、3(注视次数)三个指标因子在眼动实验中对机器人形态有显著影响。
2)本文通过分析老年人的心理特征,将“老年人对老龄陪伴机器人的外观评价”定义为二分类问题。将二元Logistic回归模型得到的3个指标作为Fisher判别因子,构建判别函数,预测正确率达91.0%。
综上所述,本研究通过提取老年人生理指标,运用二元Logistic回归模型、Fisher判别模型等方法,得出老年人对老龄陪伴机器人外观形态的评价。此研究流程简化了实验数据分析步骤,对日后老龄陪伴机器人外观形态的设计具有指导意义。
[1] 武汉大学“十四五”时期人口相关政策研究课题组. 十四五”时期人口相关经济社会政策的思考与建议[J/OL]. 中国人口·资源与环境, 2020, 30(6): 20-28.
Research Group on Population Related Policies in the 14th Five-year Plan Period of Wuhan University. Suggestions on Population-related Economic and Social Policies During the 14th Five-year Plan period[J/OL]. China Population, Resources and Environment, 2020(6): 20-28.
[2] 孙梦楚, 高焕沙, 薛群慧. 智慧养老产品开发现状研究[J]. 经济师, 2016(4): 36-38.
SUN Meng-chu, GAO Huan-sha, XUE Qun-hui. Research on the Development Status of Smart Elderly Care Products[J]. China Economist, 2016(4): 36-38.
[3] 李贵卿, 文革, 段黔冰. 智能机器人从事中国老年照顾服务的迫切性研究[J]. 四川劳动保障, 2017(S1): 64-66.
LI Gui-qing, WEN Ge, DUAN Qian-bing. Research on the Urgency of Intelligent Robots Engaging in China's Elderly Care Services[J]. Labor and Social Security, 2017(S1): 64-66.
[4] 郭伏, 丁一, 张雪峰, 等. 产品造型对用户使用意向影响的事件相关电位研究[J]. 管理科学, 2015, 28(6): 95-104.
GUO Fu, DING Yi, ZHANG Xue-feng, et al. The Impact of Product Forms on User's Usage Intention with Event Related Potentials[J]. Journal of Management Science, 2015, 28(6): 95-104.
[5] 王秋惠, 杨悦. 基于QFD与RAHP的餐馆服务机器人人因工程设计[J]. 图学学报, 2019, 40(4): 739-745.
WANG Qiu-hui, YANG Yue. Methods of Human Robot Ergonomics Design of Restaurant Service Robot Based on QFD and RAHP[J]. Journal of Graphics, 2019, 40(4): 739-745.
[6] 朱彦. 基于感性工学的家庭服务机器人外形设计研究[J]. 包装工程, 2015, 36(14): 50-54.
ZHU Yan. The Form Design of Home Service Robots Based on Kansei Engineering Theory[J]. Packaging Engineering, 2015, 36(14): 50-54.
[7] YA-HUEI W, CHRISTINE F, ANNE-SOPHIE R. Designing Robots for the Elderly: Appearance Issue and Beyond[J]. Archives of Gerontology & Geriatrics, 2012, 54(1): 121-126.
[8] INBAL D, HADAS E, MICHAL P, et al. Home Robotic Devices for Older Adults: Opportunities and Concerns[J]. Computers in Human Behavior, 2019, 98.
[9] 王秋惠, 魏玉坤, 刘力蒙. 康复机器人研究与应用进展[J]. 包装工程, 2018, 39(18): 83-89.
WANG Qiu-hui, WEI Yu-kun, LIU Li-meng. Review of Rehabilitation Robot on Research and Application[J]. Packaging Engineering, 2018, 39(18): 83-89.
[10] 王秋惠, 张一凡, 刘力蒙. 老龄服务机器人人机界面设计研究进展[J]. 机械设计, 2018, 35(9): 105-113.
WANG Qiu-hui, ZHANG Yi-fan, LIU Li-meng. Advance in Human-Robot Interface design of service robot for the elderly[J]. Journal of Machine Design, 2018, 35(9): 105-113.
[11] 王济川, 郭志刚. Logistic回归模型—方法与应用[M]. 北京: 高等教育出版社, 2001.
WANG Ji-chuan, GUO Zhi-gang. Logistic Regression Model: Methods and Applications[M]. Beijing: Higher Education Press, 2001.
[12] 孟庆坤. 成安县农户秸秆还田意愿及影响因素研究[D]. 河北工程大学, 2018.
MENG Qing-kun. Study on Willingness and Influencing Factors of Straw Returning to Farmland in Cheng An county[D]. College of Landscape and Ecologlcal Engineering, 2018.
[13] 刘荣辉, 高阳, 张湛梅. 复杂电信社交网络中家庭群体的识别与应用[J]. 工业工程与管理, 2016, 21(5): 105-110.
LIU Rong-hui, GAO Yang, ZHANG Zhan-mei. Family Group Recognition and Application in Complex Telecom Social Network[J]. Industrial Engineering and Management, 2016, 21(5): 105-110.
[14] 姜广辉, 张凤荣, 陈军伟, 等. 基于Logistic回归模型的北京山区农村居民点变化的驱动力分析[J]. 农业工程学报, 2007(5): 81-87.
JIANG Guang-hui, ZHANG Feng-rong, CHEN Jun-wei, et al. Analysis of the Driving Forces of Change of Rural Residential Areas in Beijing Mountainous Areas Based on Logistic Regression Model[J]. Transactions of the Chinese Society of Agricultural Engineering, 2007(5): 81-87.
[15] 杜谦, 范文, 李凯, 等. 二元Logistic回归和信息量模型在地质灾害分区中的应用[J]. 灾害学, 2017, 32(2): 220-226.
DU Qian, FAN Wen, LI Kai, et al. Geohazard Susceptibility Assessment by Using Binary Logical Regression and Information Value Model[J]. Journal of Catastrophology, 2017, 32(2): 220-226.
[16] 卢兆麟, 李升波, 徐少兵, 等. 基于眼动跟踪特征的汽车造型评价方法[J]. 清华大学学报(自然科学版), 2015, 55(7): 775-781.
LU Zhao-lin, LI Sheng-bo, XU Shao-bing, et al. Automobile Style Evaluation Based on Eye Tracking[J]. Journal of Tsinghua University(Science and Technology), 2015, 55(7):775-781.
[17] 李长兴, 辛程鹏, 李回贵, 等. 基于Fisher-逐步判别法的煤与瓦斯突出预测[J]. 中国矿业, 2020, 29(7): 106-111.
LI Chang-xing, XIN Cheng-peng, LI Hui-gui, et al. Prediction of Coal and Gas Outburst Based on Fisher- stepwise Discriminant Analysis Method[J]. China Mining Magazine, 2020, 29(7): 106-111.
[18] 代雪珍, 卫军超, 常在斌. 基于Fisher判别分析的分类模型研究[J]. 价值工程, 2018, 37(26): 211-213.
DAI Xue-zhen, WEI Jun-chao, CHANG Zai-bin. Research on Classification Model Based on Fisher Discriminant Analysis[J]. Value Engineering, 2018, 37(26): 211-213.
[19] 许亮, 彭屹. 心率变异性在反映心脏自主神经损伤和重构中的应用[J]. 中国生物医学工程学报, 2007(4): 618-622.
XU Liang, PENG Yi. Heart Rate Variability Assessment of Cardiac Autonomic Nerve Damage and Remodeling[J]. Chinese Journal of Biomedical Engineering, 2007(4): 618-622.
[20] 吴佳佳. 参麦注射液治疗气阴两虚型不稳定型心绞痛的疗效观察[D]. 南京中医药大学, 2011.
WU Jia-jia. The Clinical Observation on Treating Auxiliary of Unstable Angina of Qi and Yin Deficiency by Shenmai[D]. Nanjing University Of Chinese Medicine, 2011.
[21] 葛宏, 吕晓东, 范军, 等. 飞行员飞行生理参数记录检测仪数据分析系统的研制[J]. 医疗卫生装备, 2009, 30(2): 15-16.
GE Hong, LV Xiao-dong, FAN Jun, et al. Research of Data Analytic System of Physiological Parameters Detecting Device for Pilots[J]. Chinese Medical Equipment Journal, 2009, 30(2): 15-16.
[22] 李陈璇, 丁晓梅, 朱红军. 心率变异性分析在心血管疾病中应用的研究进展[J]. 中西医结合心脑血管病杂志, 2020, 18(1): 82-84.
LI Chen-xuan, DING Xiao-mei, ZHU Hong-jun. Research Progress of Application of Heart Rate Variability Analysis in Cardiovascular Diseases[J]. Chinese Journal of Integrative Medicine on Cardio-Cerebrovascular Disease, 2020, 18(1): 82-84.
[23] 李龙. 血压变异性与冠脉狭窄程度及急性冠脉缺血事件的相关性研究[D]. 安徽医科大学, 2018.
LI Long. Study on the Relationship between Blood Pressure Variability, Coronary Artery Stenosis and Acute Coronary Ischemia[D]. Anhui Medical University, 2018.
[24] 陆泉.老年歧视在老龄产品设计中的多维解构[J]. 包装工程, 2017, 38(2): 101-104.
LU Quan. The Multidimensional Deconstruction of Age Discrimination in the Design of Products Made for the Elderly[J]. Packaging Engineering, 2017, 38(2): 101-104.
[25] 刘畅, 郭伏, 刘玮琳, 等. 老年人购物网站首页界面感知可用性评价及预测[J]. 工业工程与管理, 2018, 23(6): 101-107.
LIU Chang, GUO Fu, LIU Wei-lin, et al. Evaluation and Prediction of the Elderly's Perceived Usability of Shopping Website Homepage Interface[J]. Industrial Engineering and Management, 2018, 23(6): 101-107.
[26] 刘征宏, 潘伟杰, 吕健, 等. 基于因子分析和聚类分析的情感维度提取[J]. 组合机床与自动化加工技术, 2016(3): 4-8.
LIU Zheng-hong, PAN Wei-jie, LV Jian, et al. Affective Dimensions Selection Based on Factor Analysis and Cluster Analysis[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2016(3): 4-8.
Appearance Evaluation Method of the Elderly Companion Robot Based on Logistic-Fisher
WANG Qiu-hui1,2, ZHANG Qian-nan1
(1.School of Mechanical Engineering, Tiangong University, Tianjin 300387, China; 2.School of Economics and Management, Tianjin Polytechnic University, Tianjin 300387, China)
The purpose of this paper is to propose a method for evaluating the appearance of an elderly companion robot based on eye tracking. Obtain the eye movement characteristics of the elderly when watching the companion robot through eye movement experiments, extract eye movement indicators, heart rate indicators and test variables, and use SPSS23.0 software platform to perform descriptive statistics and binary Logistic regression analysis on the variable information. Secondly, the appearance evaluation of the companion robot is defined as a two-category problem based on the physiological and psychological particularity of the elderly. Several factors with the strongest influence in the regression are used as the discriminant factors to establish a Fisher discriminant function model and perform experimental verification. Gender, age, education level, and heart rate indicators have no significant effect on the appearance attention of the companion robot; the total fixation duration has a significant negative effect, and the average fixation duration and the number of fixations have a significant positive effect. The accuracy of the discriminant model prediction sample compared with the actual sample is 91.0%. The Logistic-Fisher method is generally highly accurate, and it provides a feasible technical way to realize the appearance design evaluation of the elderly companion robot.
the elderly companion robot; appearance evaluation; eye tracking; binary Logistic regression; Fisher discriminant model
TB472
A
1001-3563(2022)02-0082-08
10.19554/j.cnki.1001-3563.2022.02.011
2021-09-20
教育部人文社会科学规划基金项目(19YJAZH093)
王秋惠(1969—),女,山东人,博士,天津工业大学机械工程学院教授,主要研究方向为工业设计、智能人因学、设计人因学、机器人人因工程及人机界面设计。
