自抗扰控制器在水下机器人中的应用
2022-01-25翟光雯吴贞犇
翟光雯 吴贞犇
摘 要:针对水下机器人模型不确定性,且在实际运行过程中会受到各种不确定的干扰,因此利用自抗扰控制器不依赖于系统模型的参数,其可以实时评估和补偿内外部扰动的特点,对水下机器人进行控制。通过对水下仿机器人系统的仿真验证,从仿真结果中可以看出,所设计的控制器取得了较为优良的控制性能,具有较好的鲁棒性和抗干扰能力,具有一定的实用价值及借鉴意义。
关键词:水下机器人;自抗扰控制;扩张状态观测器
Abstract:Aiming at the problem that underwater bionic robots are susceptible to external uncertain interference and difficult to accurately model,the use of auto disturbance rejection controllers does not depend on the parameters of the system model,which can real-time evaluate and make up for the distinguishing features of internal and external obstructs in real time,and perform the dominate,thereby improving the control performance of the underwater robot.Through the simulation verification of the underwater robot system,it can be seen from the simulation results that the designed controller has achieved relatively good control effects,has good robustness and anti-interference ability,and has certain practical value and Reference meaning.
Keywords:underwater bionic robot;active disturbance rejection control;extended state observer
水下機器人是海洋资源勘测和开发的重要工具之一,所以要提升水下机器人系统的控制精确度[1]。然而,由于存在死区、模型不确定、外界干扰等,使得控制系统的控制性能降低[2-4]。
自抗扰不仅不依靠对象的模型,而且能够实时估计和补偿内部和外部故障,抵制扰动的效果好,这种优点使ADRC在一些工程项目中发挥出了很好的效果[5]。首先给出了水下机器人的数学模型,然后通过扩张状态观测器实时观测水下机器人的各种扰动,最后通过MATLAB仿真验证了ADRC作用于水下机器人的良好性能。
1 水下机器人系统的建模
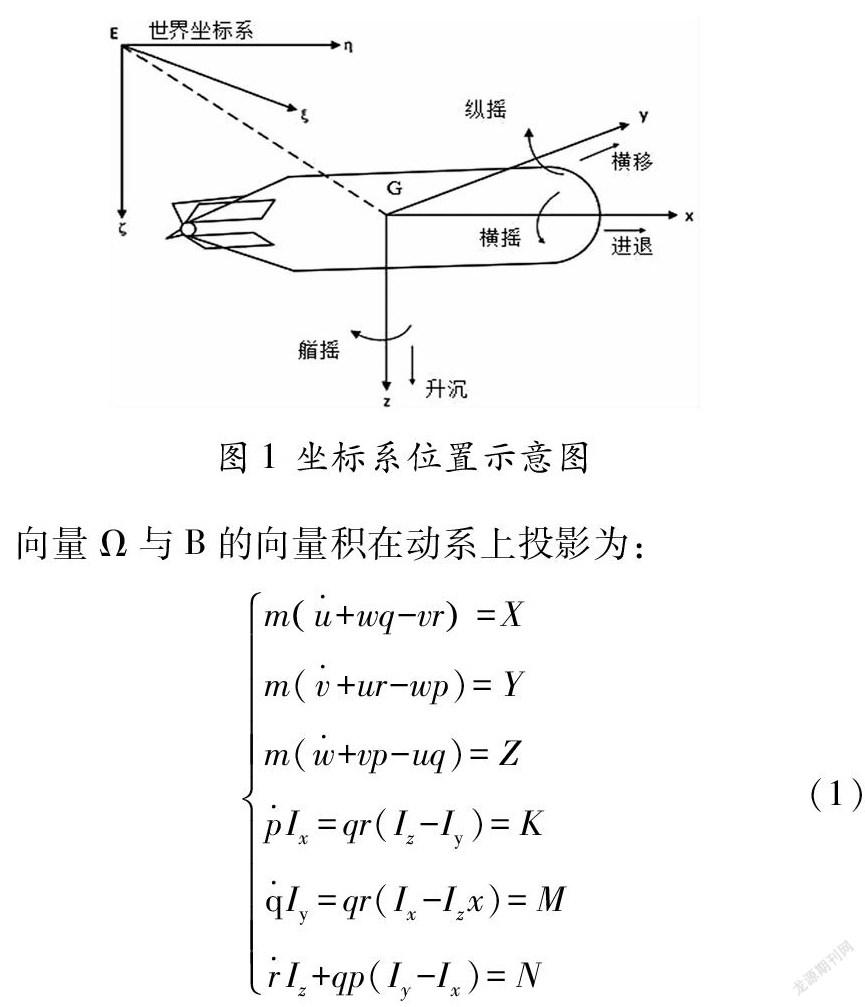
AUV在坐标系中位置如图1。
设AUV以速度V沿着动系Gx轴运动,其夹角设为β称漂角,AUV在某个时刻的位置需要参数确定,根据V在各个方向的分速度,可以得到速度V在动系的投影,动系的转动惯量。
向量Ω与B的向量积在动系上投影为:
式中:u·表示速度u的加速度,其他同理。P为AUV的动量,M表示其相对于动系的动量矩。Ix、Iy、Iz分别表示AUV相对于式(1)为AUV在水中的六自由度运动学方程。对运动方程进行简化,通常会在水平面内研究AUV航向的变化[6]。在水平面内w=p=q=0,且对应的加速度也为0,水动力方程进行泰勒展开时,由于二阶及以上的水动力系数项比较小,可以忽略不计。同时不考虑环境因素引起的干扰力,可得到水平面的简化模型:
在垂直方向主要研究AUV作定深时的运动状态,根据式(7)可对应写出AUV在垂直面的简化方程:
2 自抗扰控制器的设计
2.1 TD结构
系统的动态响应是研究系统的重要指标,引入TD[6],使输入信号不发生突变,能够更为平缓变化,对提升系统的性能有很大的帮助。输出信号是输入信号的跟踪信号差分.TD可以补偿系统的速度和超越,使之达到平衡。
2.2 NLSEF结构
在自抗扰控制系统中,NLSEF为控制提供了控制策略[7-11]。NLSEF表示是跟踪差分(TD)的输出与扩展状态观测器(ESO)产生的状态变量估计之间的非线性连接。
其具有良好的适应性和鲁棒性,只需选择合适的参数即可。
NLSEF模块输入信号是y1与z1和y2与z2两者的偏差。对于fal函数而言,α的不同取值会导致其形状不同,δ的不同取值会导致函数的非线性,可以通过改变δ防止函数在初位置发生晃动。
2.3 扩张状态观测器的结构
ADRC的核心组成结构就是ESO,ESO可以对动力学以及外部环境造成的总干扰进行消除。通过扩张状态观测方程对与系统输入状态变量无关的不确定因素监测出来,从而在系统的反馈回路设计控制器抵消干扰[12]。
式中:β01,β01,β03为反馈系数,b为控制系数,fal为非线性函数,具体可写成以下形式:fal(e)为非线性函数,具体方程如下所示:
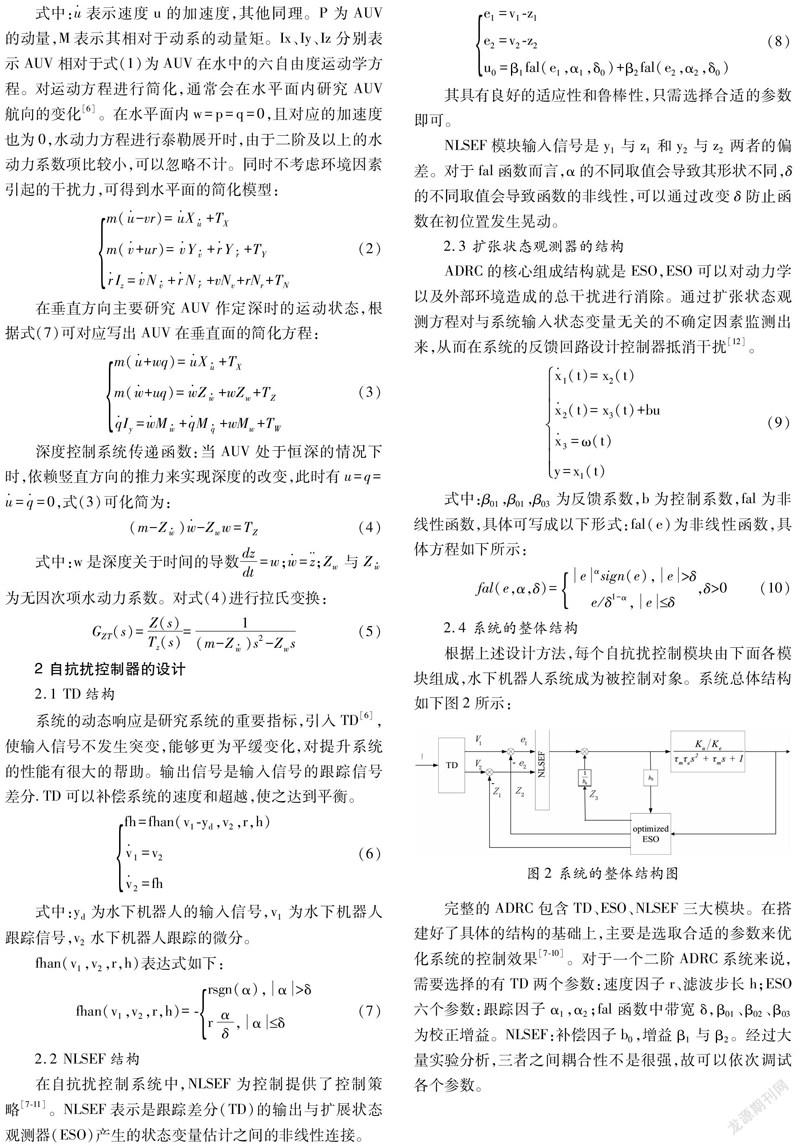
2.4 系统的整体结构
根据上述设计方法,每个自抗扰控制模块由下面各模块组成,水下机器人系统成为被控制对象。系统总体结构如下图2所示:
完整的ADRC包含TD、ESO、NLSEF三大模块。在搭建好了具体的结构的基础上,主要是选取合适的参数来优化系统的控制效果[7-10]。对于一个二阶ADRC系统来说,需要选择的有TD两个参数:速度因子r、滤波步长h;ESO六个参数:跟踪因子α1,α2;fal函数中带宽δ,β01、β02、β03为校正增益。NLSEF:补偿因子b0,增益β1与β2。经过大量实验分析,三者之间耦合性不是很强,故可以依次调试各个参数。
3 仿真分析
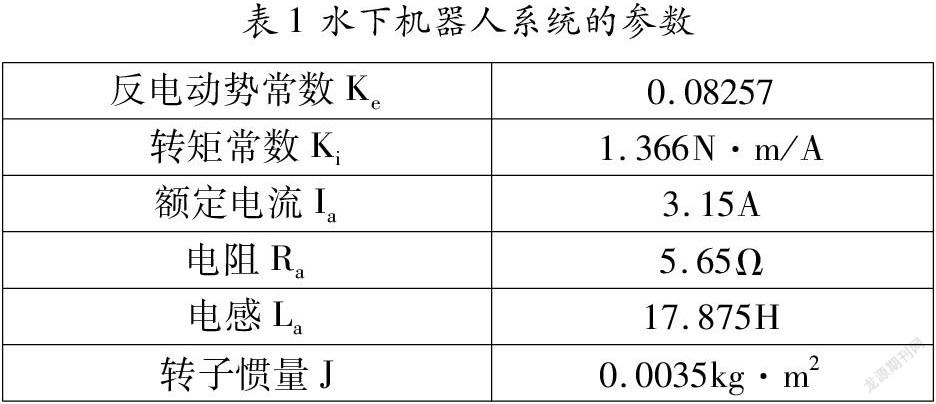
仿真水下机器人系统参数如下表1所示:
MATLAB中进行仿真实验,结果如下图所示:
基于自抗扰控制器的水下机器人具有更高的精度,较小的超调量,自抗扰控制器应用于水下机器人中可以达到令人满意的控制效果。
结论
随着科技的发展,为了加快对海洋资源开发的进度,水下机器人是海洋资源勘测和开发的重要工具。传统的是基于线性控制理论的建模和控制器设计,无法处理系统的非线性。本文介绍了一种水下机器人系统的建模与控制方法,并给出了控制算法。该控制策略提高了水下仿真机器人的操纵性能。模拟显示,该控制算法有效地提高了水下机器人的跟踪性能。该方法的提出对实际工程问题有很好的效果。
参考文献:
[1]Shen Q I,Olsen Z,Stalbaum T,et al.Basic design of a biomimetic underwater soft robot with switchable swimming modes and programmable artificial muscles[J].Smart Materials and Structures,2020,29(3).
[2]贺培.仿生机器人运动控制理论与方法研究[J].科技风,2019(17):206.
[3]閆勇程,王扬威,兰博文,赵东标.水下机器人CPG控制方法研究现状综述[J].微特电机,2017,45(11):72-77+80.
[4]张玮康,王冠学,徐国华,刘畅,申雄.腹部作业型水下机器人控制系统研制[J].中国舰船研究,2017,12(02):124-132.
[5]Yang Q,Ren X,Zhao W,et al.Optimal adaptive parameter estimation-based tracking control of motor turntable servo system[C].International Conference on Modelling,Identification and Control.IEEE,2018.
[6]马伟锋,胡震.AUV的研究现状与发展趋势[J].火力与指挥控制,2008(06):10-13.
[7]秦洪德,孙延超.AUV关键技术与发展趋势[J].舰船科学技术,2020,42(23):25-28.
[8]余明刚,张旭,陈宗恒.自治水下机器人技术综述[J].机电工程技术,2017,46(08):155-157.
[9]李硕,刘健,徐会希,赵宏宇,王轶群.我国深海自主水下机器人的研究现状[J].中国科学:信息科学,2018,48(09):1152-1164.
[10]Tobias Stapleton.THE FUTURE OF AUV DEVELOPMENT[J].Ocean News&Technology,2020.
[11]Zhengzheng Zhang,Bingyou Liu,Lichao Wang.Autonomous underwater vehicle depth control based on an improved active disturbance rejection controller[J].International Journal of Advanced Robotic Systems,2019,16(6).
[12]SUN Mingwei,WANG Zenghui,WANG Yongkun,et al.On low-velocity compensation of brushless dc servo in the absence of friction model[J].IEEE transactions on industrial electronics,2013,60(9):3897-3905.
作者简介:翟光雯(1982— ),女,汉族,安徽当涂县人,硕士,工程师,研究方向:电子信息;吴贞犇(1996— ),男,汉族,安徽宿州人,硕士,研究方向:电子信息。
