空间相机重复展收机构薄膜防护罩设计及分析
2022-01-24王洪洋郭宏伟刘荣强
肖 洪,王洪洋,郭宏伟*,张 赛,刘荣强,范 斌,边 疆
(1.哈尔滨工业大学 机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150001;2.天地科技股份有限公司,北京 100020;3.中国科学院光电技术研究所,四川 成都 610207)
1 引言
为满足深空探测的需求,空间光学相机正逐渐向大口径、轻量化和高成像精度方向发展[1]。可展开机构的应用大大提高了相机的尺度[2],空间相机的主镜由伸展机构支撑,在发射前折叠收拢,到达空间轨道后展开锁定,工作时进行多次展收[3-4]。机构展开后会受到微重力、热真空等环境条件的影响,为保证相机的成像质量,需要严格控制机构展开后的精度[5]。空间中来自太阳和地球的辐射、地球阳光反照的交替冷却和加热以及空间的杂散光等都对光学相机伸展机构的精度有影响[6],合理的热控方案对于提高相机伸展机构的精度至关重要。常用的热控方式可分为主动式热控和被动式热控,主动热控的优点是效果好、见效快,但是需要消耗能量;与主动热控相比,被动热控不需要提供能量,结构简单,设计方便[7]。多层隔热薄膜组成的防护罩属于被动热控组件,可以有效的降低伸展机构内部的温度梯度,维持伸展机构内部温度场的稳定,使相机系统的精度满足成像要求[8]。同时薄膜材料的质量非常轻,满足现代机构对于轻量化的要求[9]。
由于需求不同,薄膜防护罩结构形式多种多样,可根据遮光形式分为平面遮挡式和包围式。平面遮挡式防护罩用于阻挡来自特定方向的辐射,在如美国JWST 太空望远镜[10]、国产“高分七号”高分辨率遥感卫星上均有应用[11]。包围式防护罩用于辐射方向变化较大的光学系统,如AT⁃LAST 空间望远镜[12]和国际X 射线观测站[13]。但目前空间相机系统的伸展机构采用的防护罩多为一次性展开式,折展时易出现无序、干涉等问题,很少有可重复展收薄膜防护罩的相关研究及应用,并且现在的大多数防护罩很难实现构型的多样化,也难以满足内外包络尺寸的要求。
折纸是门艺术,通过对折叠形式的巧妙设计几乎能将平面折叠成任意二维形状或者三维结构。折纸与现代科学的结合应用于航空航天、建筑等众多领域,如太阳能电池[14]、折叠式和卷式太阳翼[15]等。本文基于Miura 折纸原理,开展了轴向可重复展收防护罩折叠方案设计,进行了运动学特性分析。针对防护罩的温控特性以及非均匀温度场下主镜安装面的热变形进行了参数影响分析,最后利用样机进行了可重复展开实验。
2 空间相机可重复伸展机构
图1 所示为空间相机可重复伸展机构原理图,机构由折展杆、张力索、主镜连接框、防护罩、控速组件等组成。整个机构可实现轴向的重复展收,薄膜防护罩起到遮光及被动热控作用,两端与上下板连接,在机构展开和收拢过程中,防护罩也要随着机构同步运动。
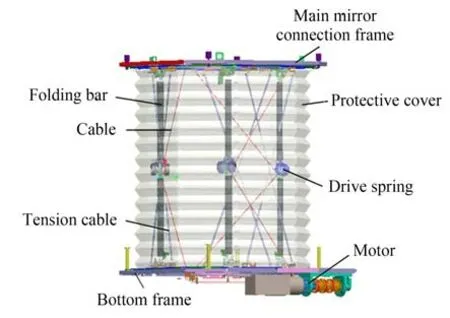
图1 空间相机可重复伸展机构Fig.1 Repeatable extension mechanism of space camera
空间相机的主镜由伸展机构支撑,伸展机构带动主镜实现展开收拢。初始时,机构处于折叠状态,涡卷弹簧驱动机构展开,电机释放拉索控速,当机构展开到位时锁定。机构收拢为展开的逆过程,电机需克服弹簧剩余力矩、张力索等效力矩及防护罩的变形阻力[16]。防护罩需配合机构完成重复展开和收拢动作,主要运动形式为轴向运动。具体的展收过程如图2 所示。

图2 重复展收机构展收过程Fig.2 Development and collapse process of the deploy⁃able development and collapse mechanism
防护罩是由平面材料折叠成的可重复展收柱状结构。防护罩构型的确定需综合考虑伸展机构内外包络尺寸、折叠难易程度、展开高度、展开刚度等要求,同时零件的包络尺寸也会限制防护罩的折叠构型,要求防护罩展开后能够以规则的形状包覆整个机构。在对比了Miura 折纸,Kresling 折纸以 及Yoshimura 钻石型折纸[17-18]等折纸结构后,发现Miura 折纸可满足上述可重复展收防护罩的要求,因此本文设计了基于Miura折纸的防护罩,并对其构型参数、运动学特性以及热控特性进行研究。
3 Miura 折纸型防护罩构型设计与分析
3.1 Miura 折纸型防护罩构型设计
基本Miura 单元的展开样式由三个参数确定:a,b,ϕ;其中a,b为折痕长度,ϕ为折痕夹角。Miura 单元的展开、折叠状态如图3 所示。折叠过程的状态可以使用4 个二面角参数来描述,分别为θA,θZ,ηA和ηZ。
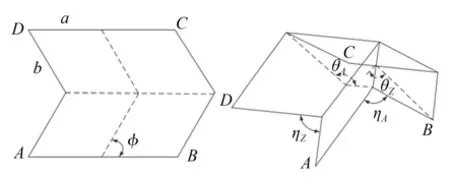
图3 Miura 折纸单元构型Fig.3 Miura origami unit structure
改变Miura 折叠模式中最小单元的几何特征,可以形成具有多种几何轮廓的折纸结构,如图4 所示。

图4 多种多面体柱式折纸结构Fig.4 Various polyhedral column origami structures
为了得到图4 中的多面体柱式折纸结构,需根据构型要求对平面材料进行设计,绘制出单元的折痕,柱式折纸单元平面图如图5 所示。
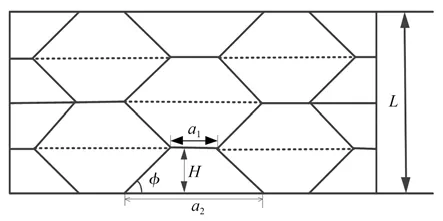
图5 柱式折纸结构部分折痕Fig.5 Partial folding structure of column origami unit
折叠成的柱式结构内外包络半径分别用r和R表示,如果三维柱式结构纵向共有n层,则有以下关系:
高度H与层数n、展开总高度L的关系为:

多边形边数N与折痕夹角ϕ的关系为:

不同的柱式折叠方式会带来内外包络半径的变化,外包络半径R为:
外包络半径R主要受内包络半径r以及单元高度H影响,影响关系分别如图6 和7 所示。由此可知,多边形截面边数N小于8 时,外包络半径大小受边数影响较大;当边数N大于8 时,边数对半径带来的变化很小,此时受内包络半径r影响较大。
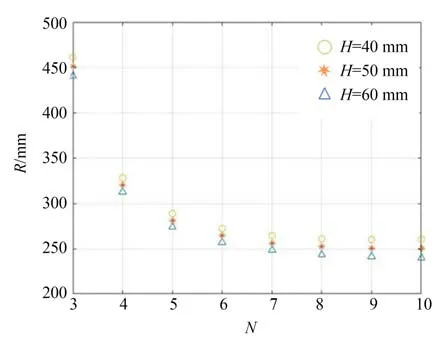
图6 高度不同时外包络半径随边数变化关系Fig.6 Relationship between the outer envelope radius and the number of edges at different heights
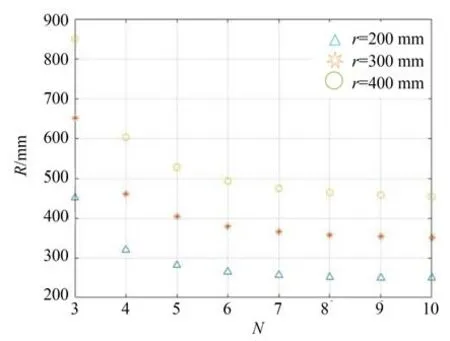
图7 内包络半径不同时外包络半径随边数变化关系Fig.7 Relationship between the outer envelope radius and the number of edges at different inner enve⁃lope radius
3.2 Miura 折纸型防护罩运动学分析
Miura 折纸柱式结构是由多个单元排列组成,其单元的主要展开方向为轴向和径向,因此针对单元进行运动过程分析时,以运动过程中轴向z和径向y两个方向的变形量与单元基本几何参数之间的关系为重点。基于Miura 折纸结构单元建立直角坐标系,其中点ABCD 位于y−z平面内,以A为原点建立的坐标系如图8所示。
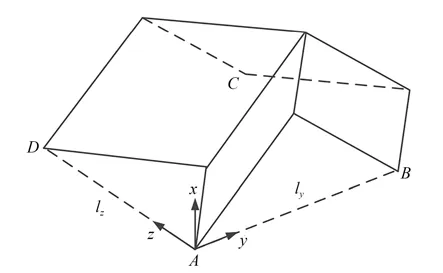
图8 基于Miura 单元的直角坐标系Fig.8 Cartesian coordinate system based on Miura unit
将单元在折叠时z,y方向的特征长度变化s与初始长度的比值定义为展收比f,f=1 表示机构处于完全折叠状态,f=0 时表示机构完全展开。因此,y方向变形量sy及展收比fy可表示为:
同理,z方向的变形量sz及展收比fz为:
展收比fy,fz随展开角度θA的变化分别如图9和图10 所示。当单元的展开角在0°~60°范围内时,径向展收比fy变化较小,在60°~100°范围内fy逐渐变小,在100°~180°之间变化迅速,展收比fy下降明显。轴向展收比fz随展开角度θA的增大而逐渐减小,当展开角度θA在140°~180°范围内时,fz基本保持不变。
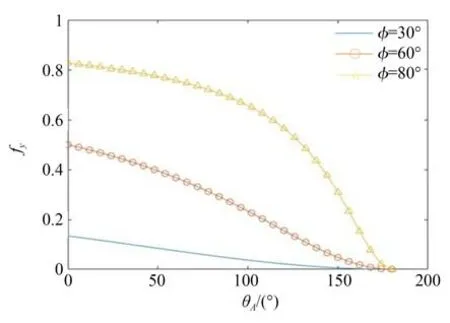
图9 径向展收比与角度的关系Fig.9 Relationship between the radial expansion and col⁃lapse ratio and the angle
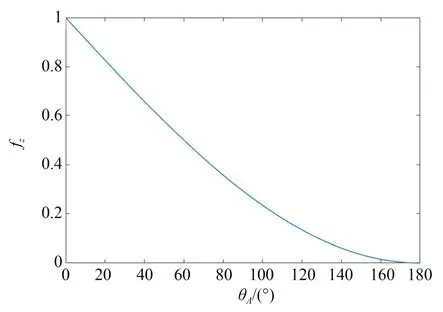
图10 轴向展收比与角度的关系Fig.10 Relationship between the axial expansion and col⁃lapse ratio and the angle
基于Miura 折纸型防护罩构型,对纸张进行了折叠,得到折纸模型如图11 所示。

图11 折纸模型Fig.11 Origami model
由以上分析可知,Miura 折纸结构简单,具有大折叠比和更少的参数限制,合理设计单元参数可以实现构型的多样化。无论是在空间利用率还是折叠难度方面,Miura 折纸结构都很适合应用于可重复伸展机构中。
4 防护罩对伸展机构热分布影响
4.1 多层隔热原理
为了提高防护罩的热控能力,防护罩使用了多层疏松、轻质多孔的隔热材料,热辐射在微小气孔中经过反射、散射和吸收被有效降低[19]。防护罩既可以起到隔热的作用又可以隔绝杂散光与外界热辐射。多层材料是由多层反射屏和间隔层组成,图12 为防护罩的具体组件。反射屏为6 μm 厚的镀铝薄膜,两层薄膜中间用涤纶网隔开,涤纶网可以防止薄膜之间发生接触带来热传导,一层反射屏和一层间隔层组成一个单元。各薄膜平行排列,采用尼龙固定,便于组装、拆卸。
图12 多层隔热组件(MLI)Fig.12 Multi-layer insulation components(MLI)
4.2 薄膜防护罩对伸展机构温度场影响分析
4.2.1 薄膜防护罩对伸展机构内部温度分布影响
图1 中伸展机构的防护罩为10 单元多层薄膜隔热材料,本文基于NX/SST 空间系统热分析模块,计算了空间光学相机在每个计算位置瞬态条件下的温度响应。如表1 所示为轨道的参数与姿态,调整空间相机视轴方向,并且设定轨道中的温度计算位置,以-269 ℃为空间环境温度,完成轨道加热、辐射、热耦合等边界条件设定。
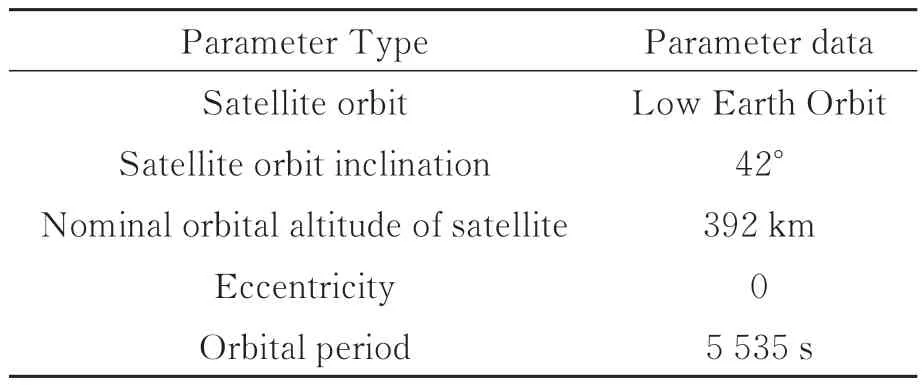
表1 轨道与姿态参数Tab.1 Orbital and attitude parameters
考虑相机会进入阴影区、光照区,整个轨道设置10 个计算位置。图13 为无防护罩时伸展机构内部三根支撑杆的温度变化。从图中可以看出机构温度呈周期性变化,温度到达峰值时,相机处于地球光照区和阴影区的分界线,此后温度迅速降低。无薄膜防护罩时,机构在经历两个周期后很快到达周期性热稳定状态,最高温度34 ℃,最低温度为-48 ℃,三根支撑杆在同一时刻最大温度差值为45℃,显然超过了光学相机的温度指标。图14 为有防护罩时伸展机构杆件温度随时间的变化关系。
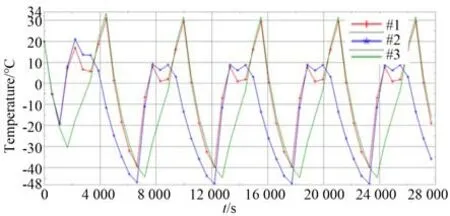
图13 无防护罩杆件温度随时间变化关系Fig.13 Relationship between rods temperature and time without protective cover
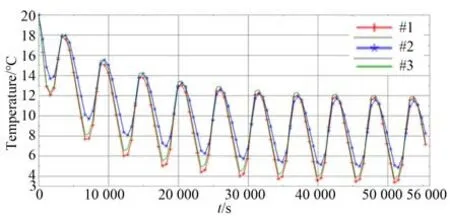
图14 有防护罩时杆件温度随时间变化Fig.14 Relationship between rods temperature and time with protective cover
从图14 中可以看出当伸展机构有防护罩包覆时,相机在轨6 个周期后,温度场趋于稳定。伸展机构内部支撑杆最高温度为12 ℃,最低温度为3.5 ℃;与无防护罩相比,最高温度降低了22 ℃,最低温度提高了51.5 ℃,有效提高了机构内部温度场的稳定性。
4.2.2 高低温工况对伸展机构的影响
有防护罩时,伸展机构内部温度场稳定性得到了显著提高,但是机构内部仍存在温度梯度,主要原因是机构内部存在多处热耦合,所以需要分析机构在高低温环境中的热分布。选取高温工况下的温度场加载到机构结构模型中,对其内部温度进行详细分析,伸展机构高温工况下的内部温度场如图15 所示。
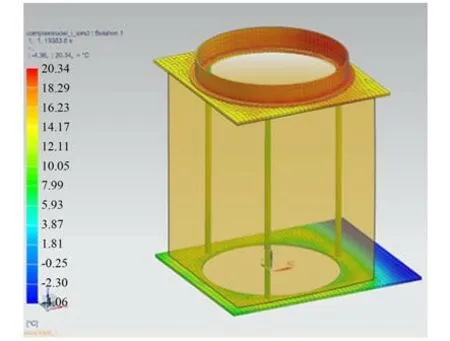
图15 高温工况下机构内部温度云图Fig.15 Internal temperature nephogram of mechanism under high temperature condition
提取高温工况下伸展机构内部杆件沿轴向的温度结果,可以发现机构在轴向上也存在一定的温度梯度。对相机内部的三根杆进一步实施热分析,三根杆件沿轴向的温度分布情况如图16所示。从图中可以看出单根杆件的最大温度梯度约为1.8 ℃,最小温度梯度约为0.8 ℃。
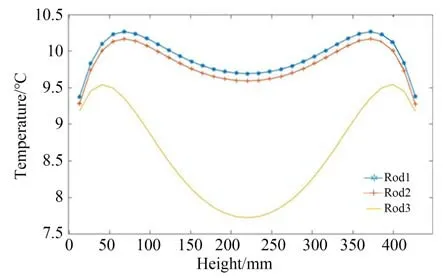
图16 高温工况下杆件轴向温度分布Fig.16 Axial temperature distribution of rods under high temperature condition
选取低温工况的节点温度映射到结构模型上,通过仿真分析就可以得到低温工况下机构内部温度场云图如图17 所示,最高温度为14 ℃,出现在主镜安装面,最低温度为-3.3 ℃,出现在安装下底板位置。
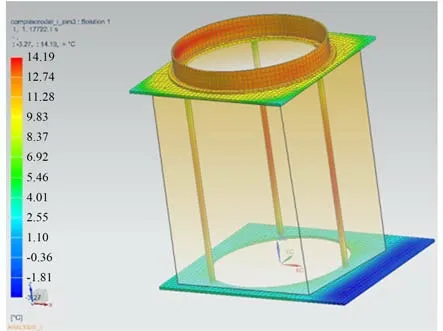
图17 低温工况下机构内部温度云图Fig.17 Internal temperature nephogram of the mecha⁃nism under low temperature condition
提取伸展机构杆件沿轴向的温度分布,利用仿真分析得到如图18 所示的低温工况三根杆件的轴向温度分布,可以发现在轴向上,单根杆件两端的最大温差约为1.8 ℃,最小温差约为0.8 ℃。
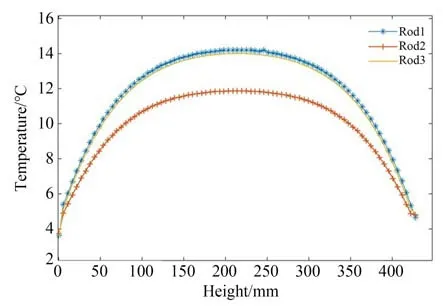
图18 低温工况杆件的轴向温度分布Fig.18 Axial temperature distribution of rods under low temperature condition
5 不均匀温度场下相机主镜安装面的热变形
前面分析表明有防护罩时,空间相机伸展机构内部仍存在不均匀温度场,导致机构产生热变形。主、次镜相对位置的变化对成像质量有很大的影响,为描述位置的变化,可通过研究相机主镜安装面的位移和倾斜来反应主镜、次镜相对位置关系的变化。
5.1 高低温对空间相机主镜安装面热变形影响
为得到高温工况下温度场对相机主镜安装面的热变形影响,使用空间系统热与Nastran 联合仿真的方法,将极端高温工况下的温度场作为结构热变形分析的边界条件。如图19 和图20 所示为高温工况下相机主镜安装环面变形量和相机主镜安装环面的变形情况。
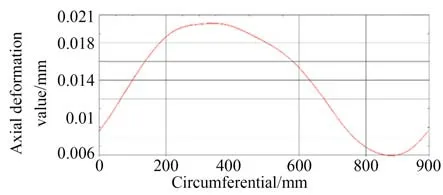
图19 高温工况下主镜安装环面轴向变形量Fig.19 Axial deformation value of the main mirror mounting ring surface under high temperature condition
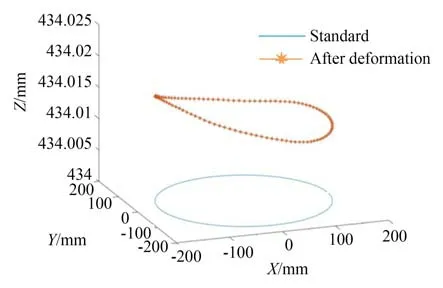
图20 高温工况主镜安装环面变形Fig.20 Deformation of the main mirror mounting ring surface under high temperature condition
在高温环境下,伸展机构各个杆件热变形量不同,导致主镜安装面同时发生了轴向位移和偏转,轴向最大位移及最小位移分别为0.019 mm和0.006 mm。
将所得到的极端低温工况下温度场作为热载荷加载到结构模型进行仿真分析,如图21 所示为低温工况下主镜安装环面的轴向变形量。由此可知主镜安装面的最大轴向变形量接近0.019 2 mm,最小轴向变形量为0.016 mm。如图22 所示为低温工况下相机主镜安装环面变形,可以看出不均匀温度场导致主镜安装面发生了轴向位移和偏转组合变形。

图21 低温工况下主镜安装环面轴向变形量Fig.21 Axial deformation value of the main mirror mounting ring surface under low temperature con⁃dition
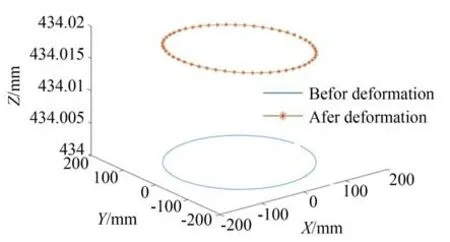
图22 低温工况下主镜安装环面变形Fig.22 Deformation of the main mirror mounting ring surface at low temperature condition
从上述分析可以看出空间相机受不均匀温度场影响较大,主镜安装环面发生了较大的轴向和偏转的组合变形,已接近相机所能允许的误差极限,因此有必要针对其内部的不均匀温度场对相机主镜安装环面热变形的影响进行更加详细的分析,以便对主动及被动热控设计进行指导。
5.2 不均匀温度场对相机主镜安装面的热变形影响
相机内部的不均匀温度场可简化为径向温差、轴向温差、周向温差及整体温度水平四种温度类型的叠加。为得到各类型温度梯度对光学相机主镜安装面热变形影响规律,将复杂温度场离散为典型状态,其中由于支撑杆件直径与整个机构外包络直径之比很小,主镜伸展机构各杆件与中心距离相同,因此忽略径向温差带来的影响。而为了达到光学相机的指标要求,温度场的轴向及周向温度梯度、整体温度水平要限定在一定范围内。
为分析不同温度梯度对主镜安装面的热变形影响,首先运用有限元软件对主镜安装面的变形情况进行分析。
5.2.1 轴向温度梯度对相机主镜安装面热变形影响
当光学相机内部伸展机构沿轴向存在温差时,内部杆件在轴向也会有温度梯度,导致其主镜支撑结构发生热变形。通常情况下,由于复杂的温度环境,防护罩内的温度分布是不均匀的,这样会导致主镜支撑结构的变化量不同,导致主镜的焦距发生改变。根据空间光学相机系统结构参数,在Workbench 软件中建立有限元模型,设置材料属性,如下表2。
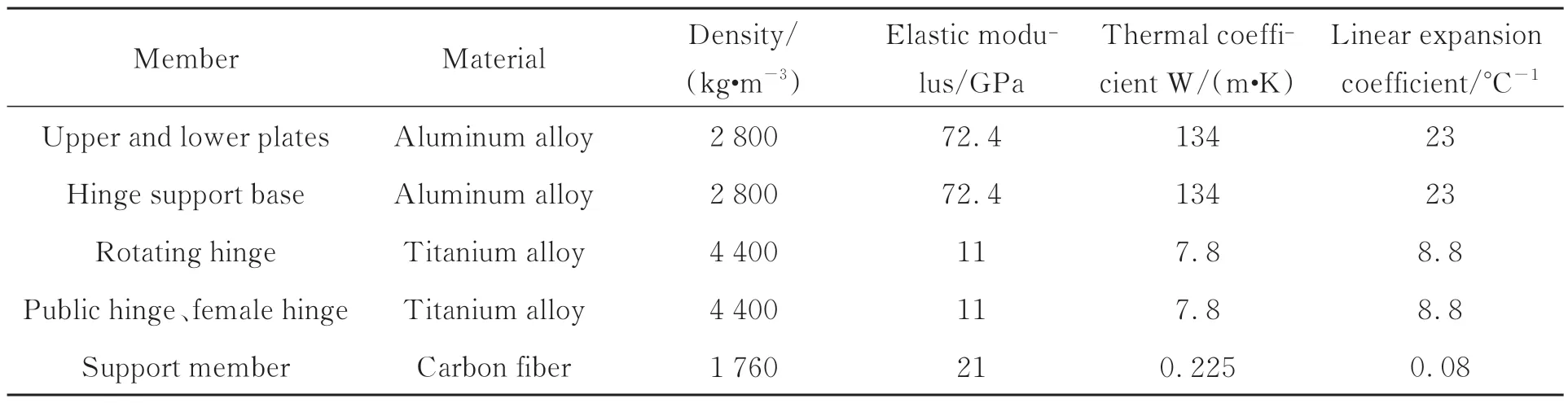
表2 伸展机构零件材料属性Tab.2 Material properties of stretch mechanism parts
为得到轴向温度梯度对相机主镜安装面的影响规律,分别假设轴向温度梯度为8 ℃、10 ℃时,进行热结构耦合分析。图23 为轴向温度梯度下的主镜安装面变形量及位形变化。
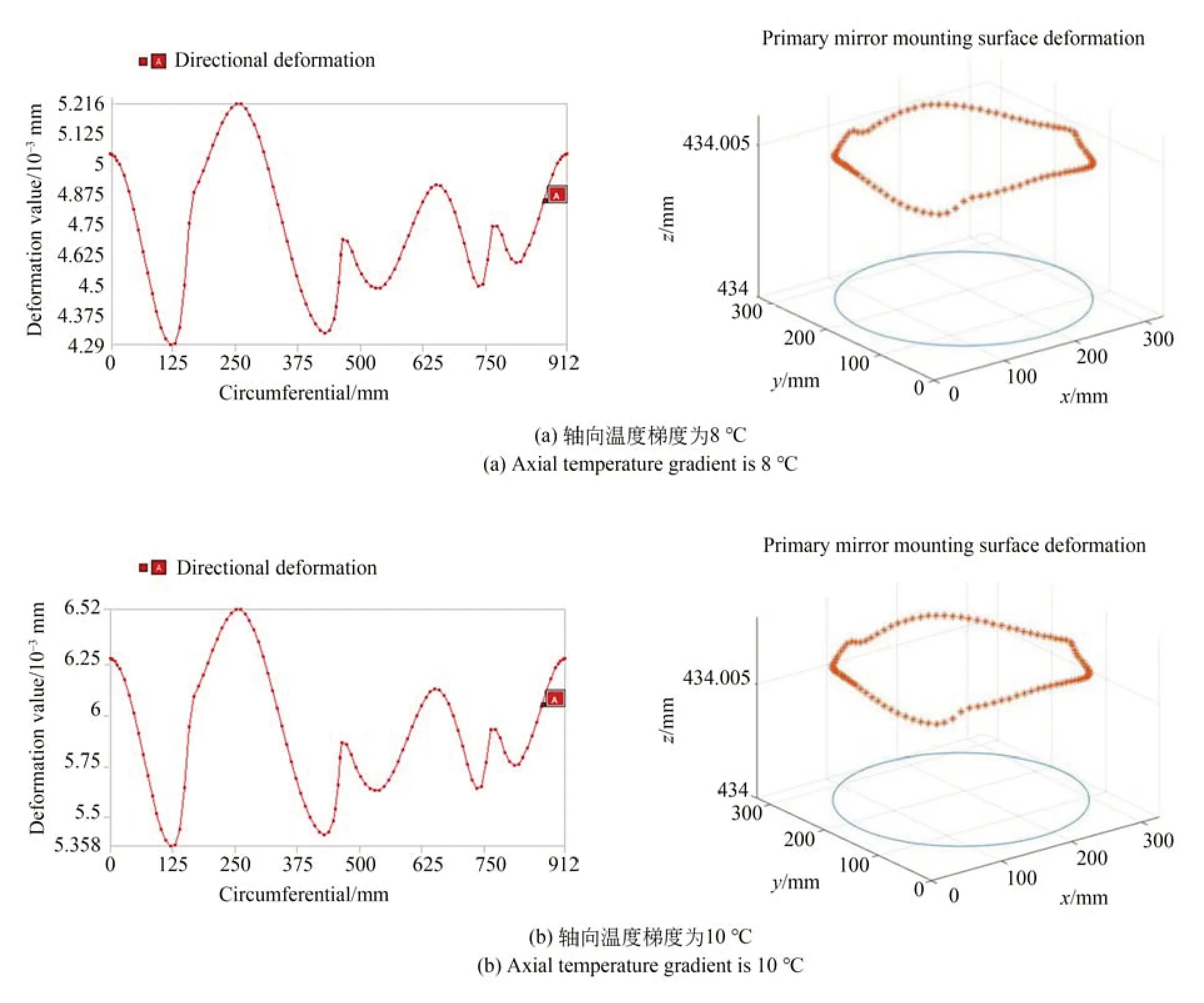
图23 主镜安装面变形量及位形变化Fig.23 Deformation and configuration changes of primary mirror mounting surface
当相机内部存在一定的轴向温差时,其主镜安装面会产生轴向位移,并且曲率半径也会有一定的变化,但安装侧面基本不存在角度变化,即无扭转变形。
5.2.2 周向温度梯度对相机主镜安装面热变形影响
周向温度梯度是指在光学相机所处的热环境中,温度沿周向是不均匀分布的。分别假设周向温度梯度为8 ℃,10 ℃时,采用与5.2.1 节相同的有限元模型,进行热变形分析,得到相机的主镜安装面的变形情况如图24 所示。
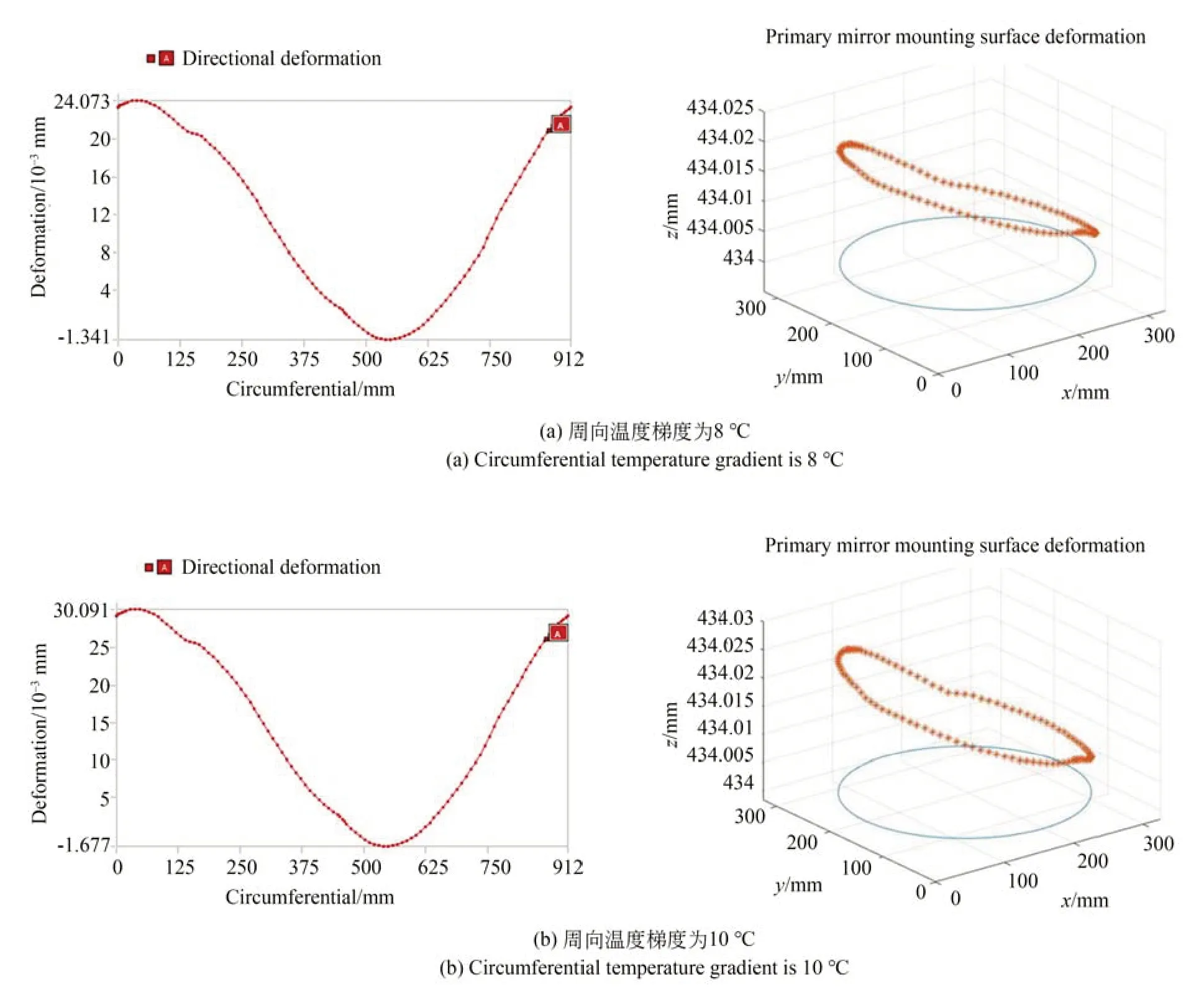
图24 主镜安装面变形量及位形变化Fig.24 Deformation and configuration changes of primary mirror mounting surface
当光学相机存在一定周向温差时,主镜安装面会产生轴向位移和角度偏转的组合变形,并且总是温度高的一侧弯向温度较低的一侧。其次,无论相机内部温度场最小值和最大值分布位置在哪里,产生的变形大小总是相同,即对光学相机周向温差正负要求是相同的。
5.3 空间相机主镜安装面热变形计算
为详细分析主镜安装面热变形大小,使用最小二乘法计算主镜安装面的具体变化量。图25为主镜安装面的变形示意图,主镜安装面节点位移主要包括3 个方向的平移和旋转。
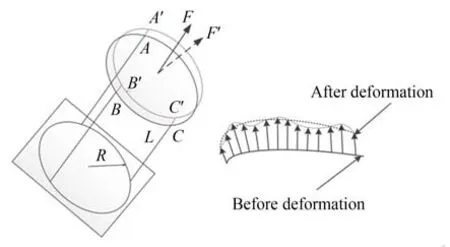
图25 主镜安装面变形示意图Fig.25 Deformation diagram of main mirror mounting surface
在主镜安装面上建立坐标系,z轴沿着安装面的轴向,x,y轴平行于安装面,各个节点的3 个方向位移表示为:

其中:Tx,Ty,Tz分别为反射镜沿x,y,z向的平移;Rx,Ry,Rz分别为反射镜绕x,y,z轴的旋转。
定义目标函数E 满足:
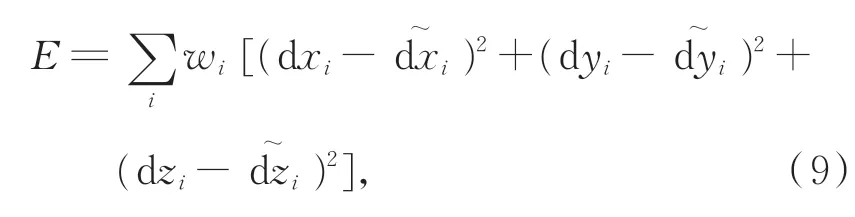
其中,wi为节点的权重因子。
定义拟 合系数(Tx,Ty,Tz,Rx,Ry,Rz),使E最小,可得:

基于最小二乘法对热变形离散点进行拟合,得到了各类型不均匀温度场对相机主镜安装面的变形影响规律,光学相机主镜安装面变形量随轴向温差、温度水平以及周向温差的函数关系分别为:
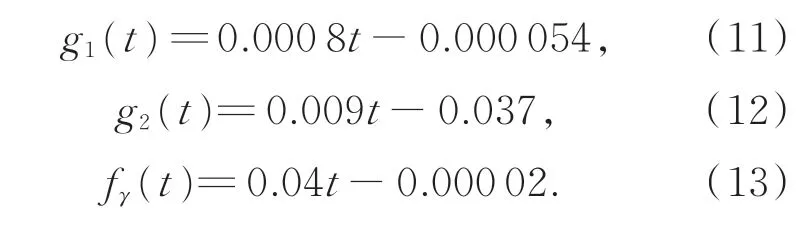
可以看出轴向温度每变化1 ℃产生的热变形为0.8×10-3mm,温度整体水平每变化1 ℃,产生的变形量绝对值为0.009 mm,周向温差每变化1 ℃,产生的角度偏转是0.04″。
经过上述分析发现,相机内部周向温差对空间相机热变形的影响要比轴向温差、温度水平的影响更大,因为周向温差不仅使伸展机构产生轴向位移使得光学相机离焦,还使得它产生了一定的偏转。因此,薄膜防护罩可起到的一定的被动热控防护作用,可有效的提高相机的成像质量。
6 试验验证
6.1 重复展收试验验证
为验证伸展机构的重复展收功能,根据设计模型参数研制了原理样机,样机展收过程如图26 所示。机构由涡卷弹簧驱动展开,电机反转带动拉索控速,机构展开到位后钢化锁定;机构的收拢过程由电机正转带动拉索实现解锁,拉索牵引上连接框向下运动,到位后实现系统的收拢。利用样机进行多次重复展收实验,样机均顺利的实现了轴向的重复展收,且展收过程稳定可靠。

图26 机构展收过程Fig.26 Mechanism development and collapse process
给定如表3 所示的防护罩参数,设计平面折痕并折叠出防护罩样机。
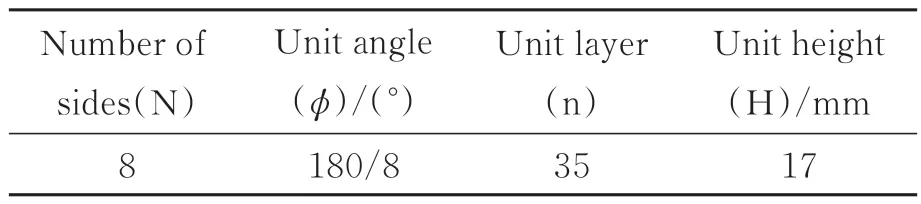
表3 防护罩参数Tab.3 Protective cover parameters
将防护罩样机与伸展机构连接组成空间相机可重复伸展机构样机,如图27 所示。对其进行多次重复展收试验,展收过程防护罩均保持规则的形状,从而验证了防护罩具有良好的重复展收功能。

图27 可重复伸展机构样机Fig.27 Repeatable extension mechanism prototype
6.2 伸展机构重复展收精度验证
为保证相机成像稳定,伸展机构的重复精度要得到保障,其精度与铰链重复展开后接触位置的随机分布,以及张力索等外部施力的一致性等因素有关,具有一定的概率性和随机性。因此通过样机的试验,实际测量机构的重复精度。
如图28 所示为机构重复精度测量方式,使用传感器的三个传感头同时测量伸展机构端部顶点X,Y,Z三个方向的重复精度,其中X,Y方向指向伸展机构径向,Z向指向轴向。伸展机构完全展开后,激光位移传感器的示数清零,此时使伸展机构完成一次重复收拢-展开过程,然后记录激光位移传感器的参数变化量,表征伸展机构三个方向的位移变化量。
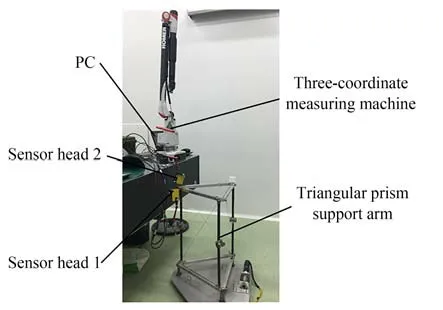
图28 机构重复精度测量Fig.28 Mechanism repeatability precision measurement
将上述过程重复10 次,测量结果如表4 所示。通过10 次重复测量得到伸展机构在X方向的重复精度最大值为0.009 2 mm,Y方向为0.009 7 mm,Z方向为0.009 6 mm,机构在X方向的重复精度平均值的绝对值为0.002 16 mm,Y方向为0.005 96 mm,Z方向为0.003 48 mm,机构的重复展收精度很高,可有效的保证相机的成像质量。
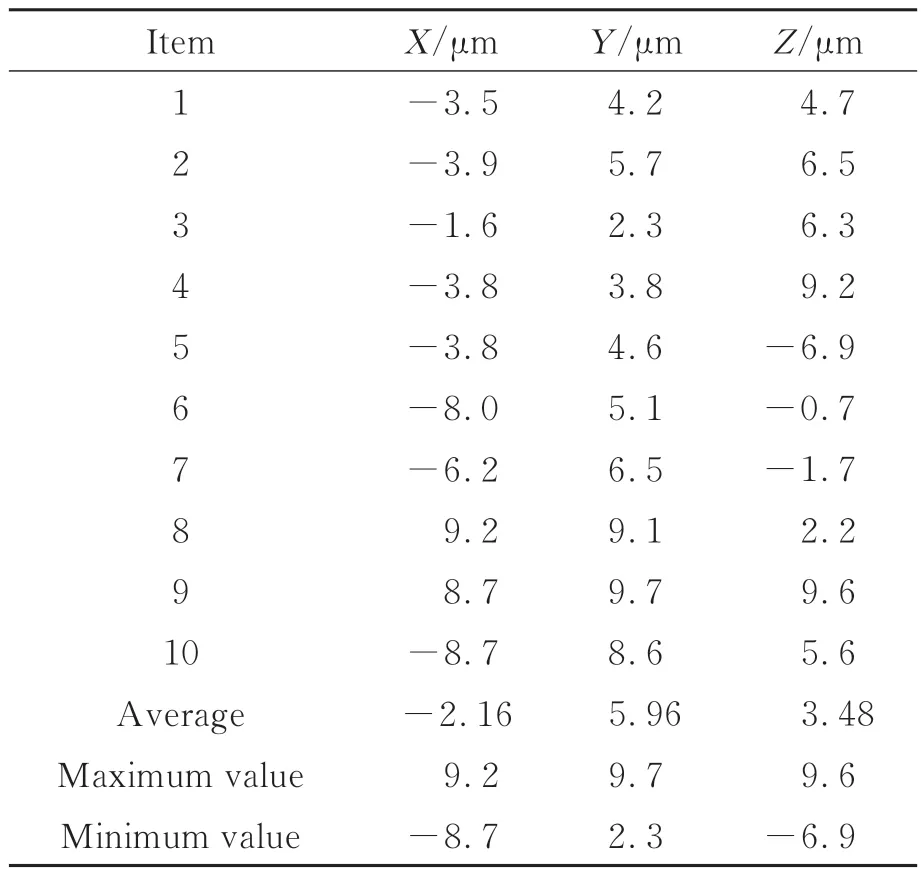
表4 测量结果Tab.4 Measurement results
7 结论
本文针对空间相机重复伸展机构进行了可重复展收薄膜防护罩的设计与分析,分析了伸展机构内部的热分布以及机构和主镜安装面的热变形,对相机可重复展收机构重复展收精度进行了实验验证。分析发现防护罩具有良好的重复展收效果,有防护罩时相机内部伸展机构杆件最高温度为12 ℃,最低温度为3.5 ℃,与无防护罩相比,最高温度降低了22 ℃,最低温度提高了51.5 ℃,有效的降低机构内部的温度梯度。通过热变形分析发现相机内部机构轴向温度每变化1 ℃,主镜安装面产生的热变形为0.8×10-3mm;温度整体水平每变化1 ℃,产生的变形量绝对值为0.009 mm;周向温差每变化1 ℃,产生的角度偏转是0.04″;周向温度梯度对相机的成像质量影响较大,所以使用防护罩可有效的提高光学相机的成像精度。实验结果表明,机构在X方向的重复精度平均值的绝对值为0.002 16 mm,Y方向为0.005 96 mm,Z方向为0.003 48 mm,机构具有很高的重复精度。