跨座式轨道梁不平顺检测系统设计与试验
2022-01-22冯济桥丁军君晋军辉颜永风黄运华
冯济桥 丁军君 晋军辉 颜永风 黄运华
(1. 西南交通大学机械工程学院 四川 成都 610031;2. 株洲中车特种装备科技有限公司 湖南 株洲 412005)
跨座式单轨交通系统是一种典型的中运量交通系统,最早用于19世纪初的货物运输系统和旅游观光设施,后随着科技发展多应用于城市轨道交通运输[1]。跨座式单轨交通具有转弯半径小、爬坡能力强、噪音低、占地面积小、安全性高等特点,适用于山地地形、复杂地形和高密度建筑群的城郊及城区[2]。在跨座式单轨车辆行车过程中,车辆的走行轮、导向轮、稳定轮直接与轨道梁接触,轨道梁表面的不平顺会引起车辆系统的各种动态响应,从而对单轨系统动力学特性产生影响[3]。
跨座式单轨交通车辆的走行轮、导向轮和稳定轮均为橡胶轮,轨道梁多为混凝土结构,其轮轨关系不同于传统钢轮钢轨系统,也不完全等同于轮胎路面系统。由于跨座式单轨交通的车辆结构与钢轮轨道交通类似、走行方式与公路交通类似,所以对轨道梁表面不平顺的研究分析应结合轨道不平顺以及路面不平度的概念和特点。
1 不平顺检测原理
目前轨道不平顺检测与路面不平度检测的方法主要有固定基准法、弦测法与惯性基准法三种。
综合分析各检测方法的优缺点,本文选用固定基准法作为轨道梁表面不平顺检测原理,使用同步带滑台作为检测基准,利用激光传感器获取轨道梁表面高程数据,使用步进电机保证传感器的连续稳定运行。在保留固定基准法检测精度高、重复特性良好等优点的情况下,使用自动化程序控制检测流程,以求提高检测效率的同时,降低人为误差对检测结果的影响。
2 不平顺检测系统设计
跨座式轨道梁不平顺检测系统采用固定基准作为测量原理,系统基于Arduino和Python平台开发,利用激光传感器采集不平顺高程数据,并利用蓝牙技术实现数据间的无线通信。系统设计主要分为主体结构设计、测控系统程序设计与上位机程序设计三个部分。
2.1 检测设备主体结构设计
检测设备主体采用长度为2 m的同步带模组作为固定基准杆,基准杆上设有滑台,位于端部的步进电机可带动滑台前后移动。同步带模组的滑块与导轨为零间隙配合,能够保证检测过程中传感器移动的稳定性,减小误差;同步带模组电机选用57式步进电机,该步进电机尺寸小巧、运行平稳、振动幅度小,在2.8 A的额定电流下可提供1.3 N·m的最大扭矩,满足设计要求。
由于轨道梁的结构特殊,检测设备需要对轨道梁顶面和两侧面同时进行不平顺测量,设计了一种鸥翼式结构支架安装激光传感器,支架整体固定在滑块上,随滑块的移动而移动。设置三个激光位移传感器分别位于支架的顶部和两侧,顶部传感器对走行轮行驶线路不平顺进行测量,两侧传感器对导向轮行驶线路不平顺进行测量。
为保证检测设备在移动过程中不发生偏移侧倾,确保激光传感器始终在正确的检测位置,参照跨座式转向架的结构,在检测设备两侧设计稳定杆,以稳定设备。在稳定杆与两侧轨道接触部位安装预压缩弹簧轮,确保检测设备运行在轨道中间。为了不影响传感器支架测量时的移动,稳定杆部分安装在检测设备前后端部。检测设备主体结构三维模型如图1所示。

1—稳定杆;2—基准杆;3—弹簧轮;4—激光传感器;5—传感器支架。图1 检测仪器结构三维设计图
2.2 单片机测控系统程序设计
按照功能主要将测控系统分为两大部分,两部分相互独立,分别用两套系统控制,在上位机中统一发送命令,实现对两套系统的控制。图2为测控程序流程图。
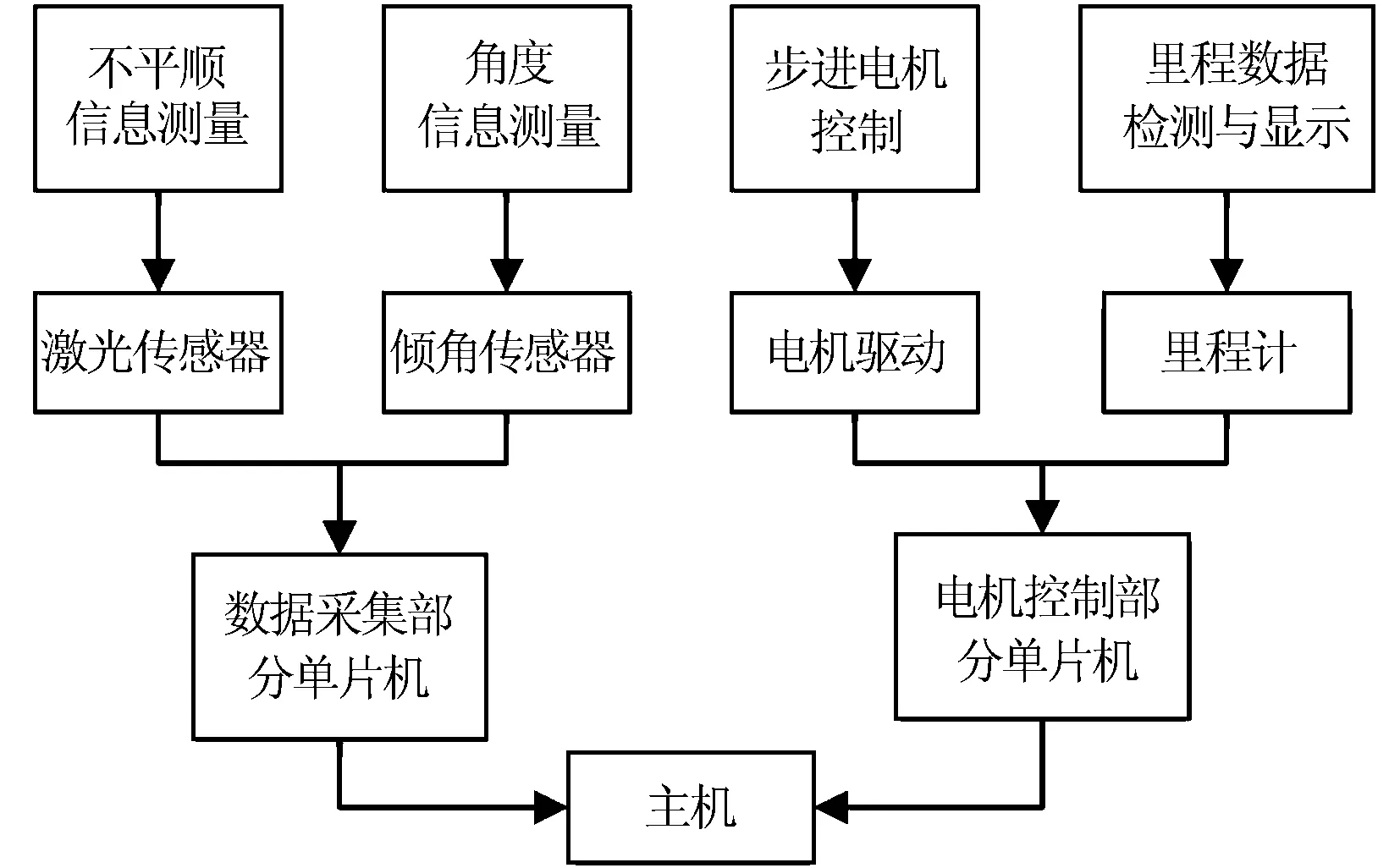
图2 测控程序流程图
数据采集部分整体安装在传感器支架上,负责采集不平顺高程数据与倾角信息。电机控制部分位于设备后端位置,主要的功能是接收用户命令,根据要求驱动步进电机以实现对同步带模块的控制,带动数据采集模块进行测量工作。本设计选择Arduino Nano开发板作为数据采集部分的主控模块,其结构小巧,质量轻,相比于其他开发板,在尺寸相同的情况下拥有更多的IO口以及更丰富的FLASH存储空间,满足采集系统对轻量化以及对接口数量的要求[4]。
2.3 基于Python的上位机程序设计
在常用的测试系统中,单片机成本较低、使用方便、实现功能较多,通常作为下位机完成各项工程需求;PC机运算速度快,分析能力强,通常作为上位机总体控制系统的运行[5]。设计采用Python作为上位机程序语言,利用pyserial库实现上位机与单片机之间的串口通信。上位机程序中主要功能包含对单片机测控部分采集的不平顺数据进行处理、分析、展示、保持,对步进电机转动角度的控制,对里程计模块发送激活命令等。
3 不平顺数据预处理方法
在跨座式轨道梁不平顺检测过程中,由于外部干扰因素影响以及仪器自身结构设计原因,往往会使测量结果出现偏差。这些偏差通常在数据分析中有所体现,如果不对其进行修正和补偿,将会对后续的数据分析处理工作造成较大的影响。因此,下文分析不平顺数据可能出现误差的原因,并通过相应的处理方法对数据进行预操作,提高数据的精确性与完整度。
3.1 异常数据修正
采用激光传感器采集不平顺高程数据,激光传感器基于光线反射原理进行距离检测,在移动过程中,轨道梁上的异物往往会导致采集数据出现异常,本设计使用绝对值修正法对其进行判定修正。绝对值修正法在莱茵达准则的基础上对异常数据进行修正,该方法对数据是否符合正态分布无特殊要求,处理规则可信度较高[6]。以下为绝对值修正法计算过程。
假设一组均值不为零的数据如下所示:
(1)

x0(i)=x1,x2,…,…xi,…,xn
(2)
根据统计原理可得,xi的值通常在一个阈值W之间波动变化,故当xi的绝对值超出W时,判定此值为异常值。阈值W根据零均值数据序列x0(i)样本的绝对平均值确定,计算公式如下所示:
(3)
其中:k为经验系数,取值通常在4~5之间。
在修正过程中,异常值xi通常用绝对平均值代替,公式如下:
(4)
利用上述方法对异常数据进行处理,对尖点数据消除有较好的效果,图3为数据处理前后对比图。

图3 异常数据处理前后对比图
3.2 平滑滤波处理
在测量过程中,由于步进电机自身的转动会引起检测设备整体的轻微抖动,同时传感器本身会受到温度、天气等影响,这些干扰因素叠加在一起往往会使检测数据包含大量周期性振动信号,导致不平顺数据在时域中的波形并不平滑,不能准确还原轨道。因此,本文对此类干扰信号进行平滑滤波处理,削弱上述因素对不平顺数据造成的影响,使检测数据更加准确。
采用Savitzky-Golay平滑滤波算法对不平顺数据进行滤波处理,Savitzky-Golay平滑滤波又称为卷积平滑滤波,是一种常用的时域平滑去噪滤波算法。S-G滤波基于区域性多项式最小二乘法拟合算法,在平滑滤波的同时又能够保持信号的波形和宽度不变[7-8]。
在计算过程中,首先对原始曲线进行测量,定义一个窗口,窗口长度为n=2m+1。将原始曲线假设为以某一数据点为中心的n个数据,并对这一组数据进行k-1次多项式拟合,公式如下所示:
y=a0+a1·x+a2·x2+…+ak-1·xk-1
(5)
其中:一般令n大于k。由多项式原理可知,存在2m+1个数据和方程,拟合方程也可以表示为矩阵形式。方程可以写为:
Y=X·A+ε
(6)
其中:Y为数值向量,A为系数矩阵,X为自变量矩阵,ε为残值。
(7)

(8)
随着窗口向右滑动,每一个数据点会得到一个拟合值,拟合后的数据被去除了高频分量。平滑滤波前后效果对比如图4所示。
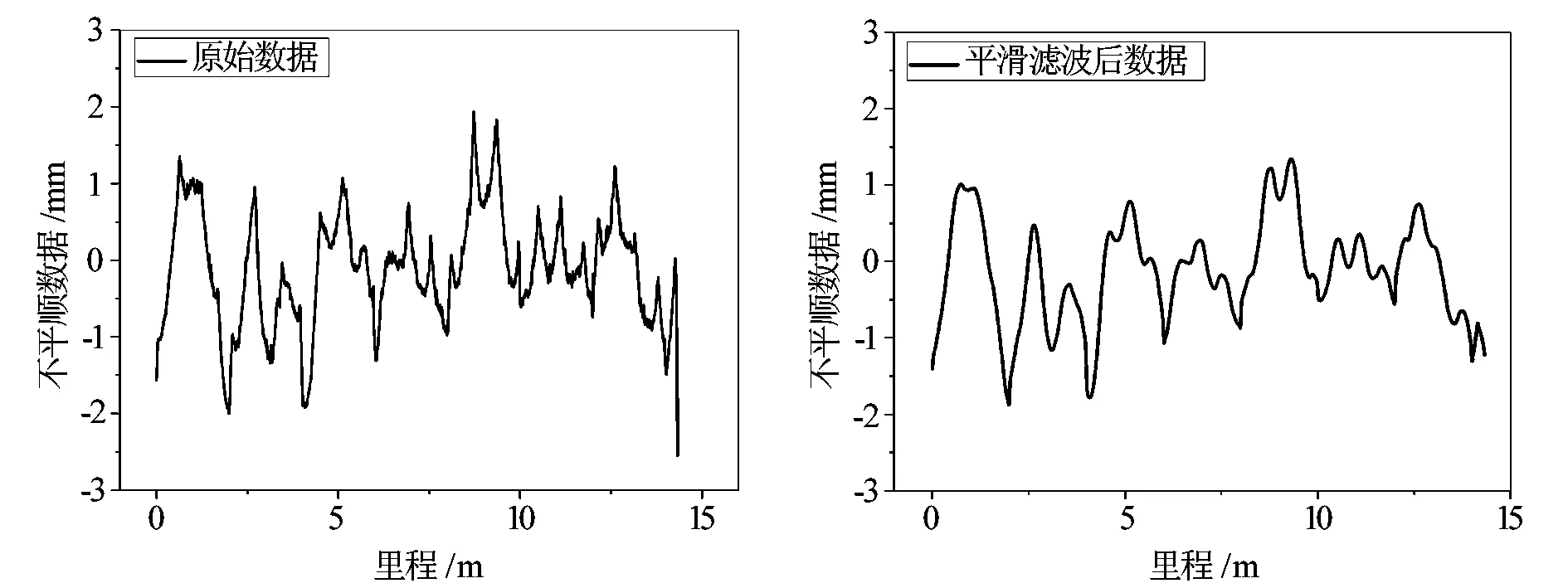
图4 平滑滤波前后对比图
4 线路试验测试结果
为检验设备测量效果,对轨道梁进行线路试验测试,同时为了进行对比仿真试验,还采集了车体与转向架的振动加速度数据。线路试验选在贵州省习水县一跨座式单轨线路上一个在无风、晴朗的天气下进行。试验现场如图5所示。

图5 线路试验现场
该线路轨道梁采用工字型钢梁结构,单跨长度约为15 m,轨道梁之间用连接器进行连接。在分析数据时,对每跨轨道梁分别进行统计,以其中两跨轨道梁为例,其轨道梁不平顺数据如图6所示。

图6 单跨轨道梁不平顺
5 车辆动力学仿真及数据对比
使用SIMPACK软件建立车体动力学模型,在建模过程中将车辆简化为车体、构架、摇枕与走行轮几大部分。该跨座式车辆转向架为两轴、有摇枕的结构,采用中心斜对称布置;转向架与摇枕间通过沙漏弹簧和斜向安装的减振器传递垂向力与横向力,通过斜对称布置的牵引拉杆传递纵向力;车体通过摇枕上的回转支承与摇枕连接;走行轮为单悬臂支撑方式,采用无内胎的橡胶充气轮胎;导向轮和稳定轮均采用聚氨酯实心轮。
在仿真计算中,将实测轨道梁不平顺数据导入模型作为线路激励,计算转向架横向与垂向加速度数据,与实测加速度数据进行频谱分析对比,以验证实测不平顺数据的准确性。
车辆运行速度设置为15 km/h,采样频率设置为1 000 Hz,采集车辆运行15 s的数据。数据后处理过程中,由于高频振动信号通常由车辆自身或传感器本身引起,对车辆动力学影响较小,故对加速度数据进行0.5~50 Hz带通滤波,去除高频信号,再对加速度数据进行傅里叶变换,分析其振动频率分布特性。转向架振动加速度数据仿真与实测结果对比如图7所示。
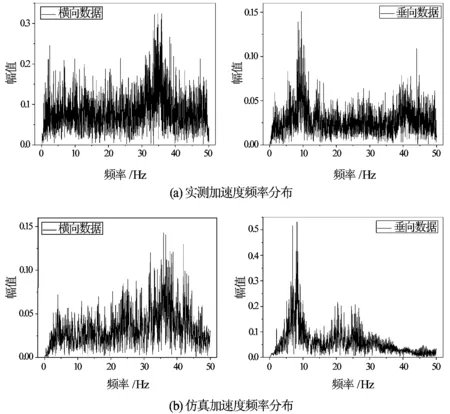
图7 加速度频率分布对比图
由上图可以看出,转向架横向加速度频率分布较为均匀,在30~40 Hz部分频率相对突出;垂向加速度振动主频主要位于5~10 Hz之间;仿真数据与实测数据振动频率分布类似,证明实测不平顺数据准确性良好。
6 结束语
以上利用固定基准作为测量原理,基于Arduino和Python平台,设计了一种针对跨座式轨道梁表面不平顺的检测系统。设备主体以同步带模组作为固定基准,使用步进电机带动激光传感器采集不平顺高程数据,并利用蓝牙技术实现数据间的无线通信,该系统具有精度高、重复特性好、操作简易、结构可靠等优点。通过实测数据与仿真数据对比,证明系统测量数据准确性良好,能够还原中低速跨座式轨道梁表面不平顺真实情况,对于推进跨座式单轨动力学性能研究具有积极作用。