3P悬臂式前列腺癌粒子植入机器人结构设计与仿真
2022-01-21张为玺张永德王立非
张为玺, 张永德, 王 彬, 王立非
(1.哈尔滨理工大学机械动力工程学院, 哈尔滨 150080; 2.南方科技大学第二附属医院, 广东 深圳 518055)
前列腺癌是男性生殖系统最常见的恶性肿瘤[1]. 放射性粒子植入技术具有靶向性强、无副作用、创伤小和疗效确切的特点. 传统放射性治疗过程中,医生直接操作尺寸庞大的手术器械,长时间的手术容易造成疲劳,质量下降,不能充分发挥医生的手术水平;并且手术操作复杂,年轻医生需要经过长期的学习和专业培训,成长周期长. 机器人技术和放射性治疗技术相结合会克服上述传统放射性治疗术的缺点.
近年来,Yu等[2]、Podder等[3]设计了单通道与多通道粒子植入机器人系统. Salcudean等[4]设计了一个4自由度的前列腺短距离放疗机器人. 文献[5]中Vaida等采用并联式结构,该结构设计不但具有导向板,还可以自由地调整植入针的进针角度. 姜杉课题组设计了一个6自由度基于核磁图像导航的前列腺针刺手术机器人[6]以及直角坐标式超声图像导航前列腺手术机器人[7]. 张永德等[8]提出了1P2R悬臂式及基于3-PCR并联式的前列腺癌粒子植入机器人系统,并进行了运动分析等相关工作. 现有机器人系统多为直角坐标式和并联式,但是直角坐标式体积庞大,运动灵活性较差;并联机构运动学反解复杂,控制难度大,具有运动奇异点;1P2R悬臂式机构需要进行重力补偿,局部结构变复杂且精准控制难度大.
本文基于模块化设计思想设计了杆件结构尺寸,得到了一种运动解耦的前列腺粒子植入机器人. 文中详细介绍各部分的结构设计,并对其运动学进行分析. 完成了机器人的运动学和动力学仿真,验证了所设计结构的合理可行.
1 前列腺粒子植入机器人结构设计
前列腺粒子植入过程中,患者采用膀胱截石位,可操作空间[9]如图1所示.

图1 可操作空间尺寸(单位: mm)Fig.1 Dimension of operable space (unit:mm)
采用模块化设计[10],分为3自由度的位置调整模块、2自由度的姿态调整模块、2自由度的粒子植入机构3个模块,彼此间的运动关系完全解耦,降低了控制难度.
1.1 位置调整模块设计
由图1可以看出:竖直方向工作范围较大,水平方向工作范围较小. 结合SCARA型[11]和直角坐标型2种结构的优点,并进行融合后得到图3所示的机构模型. 悬臂式位置调整机构的3自由度由3个移动副来实现. 其中Y轴运动与XOZ平面内的运动相互解耦,而XOZ平面内的运动关系未知,因此建立坐标系如图2所示,设各点坐标为:A(m,zA)、B(xB,zB)、C(xC,n)、G(xG,zG)、H(xH,zH).根据平行四边形的结构特点,可得如下几何关系:
BF=CG,BF‖CG;BC=FG,BC‖FG
令
AB=a,BF=CG=b,BC=FG=c,GH=d
则,B点的坐标可表达为如下2种形式:
(1)
(2)
式中:θ为末端H点与X轴的夹角;φ为C点与X轴的夹角;m为A点X轴坐标;n为C点Z轴坐标.
由式(1)(2)联立,并整理解得
(3)
又因为H点的坐标表示为
(4)
将式(3)代入式(4)中并整理得
(5)
直接求解等式(5)比较困难,在结构设计时可实现
(6)
解得
ad=bc
(7)
将式(6)代入式(5)解得
(8)
杆长参数取值应满足式(7),杆长参数具体取值如下:
(9)
将等式(9)代入式(8)中,得
(10)
式中m、n、a、b为常量,所以xH只与xC有关,zH只与zA有关.即C点的横坐标决定了末端点H的横坐标,A点的纵坐标值决定了H点的纵坐标,由于A、C两点运动独立,因此H点在X轴与Z轴的运动解耦.
将式(9)代入式(10)得
(11)
3个移动关节的有效行程取为100 mm,由式(11)可知,末端点H的工作空间为x×z×y=400 mm×300 mm×100 mm的长方体,如图2所示,可以满足会阴部狭小空间的要求.又由于前列腺体积约为25 mm×30 mm×40 mm,因此所设计的结构完全能够覆盖粒子植入目标区域,且有较大余量.

图2 工作空间示意图Fig.2 Workspace diagram
位置调整模块结构如图3所示.利用串联双平行四边形机构,来实现末端工作平台固定的水平姿态.串联双平行四边形机构由图中平台连杆a、b以及三脚架组成.

图3 位置调整模块Fig.3 Position adjustment module
1.2 姿态调整机构设计
姿态调整机构为改进的2自由度双平行四边形远程运动中心(remote center of motion,RCM)机构[12].原理如图4所示,双平行四边形为MNBD、ABFE.

图4 姿态调整机构原理图Fig.4 Schematic diagram of attitude adjustment mechanism
为避免机构奇异点,简化驱动源,降低结构质量.在原有的双平行四边形机构的基础上加入了第3个平行四边形MNHG,且保证NH⊥NB.在X轴方向引入1个旋转自由度,两者配合可实现一定空间椎体范围内的任意姿态调整.
前列腺假定为25 mm×30 mm×40 mm的长方体区域,见图5,前列腺的最前端距离人体会阴表面距离约为30 mm,假设姿态调整模块不动点位于图5坐标系原点O,为使粒子植入器能覆盖全部前列腺体,φ角必须满足
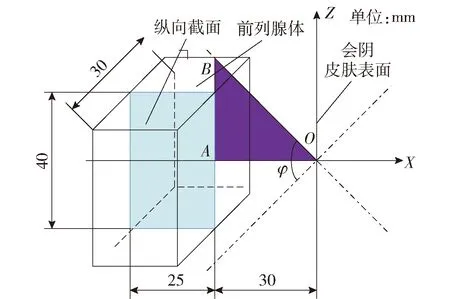
图5 椎体空间分析Fig.5 Spatial analysis of vertebral body
(12)
φ>79.6°
(13)
考虑在粒子植入过程中水肿的体积膨胀[13],选取角参数为90°.姿态调整模块结构见图6.

图6 姿态调整模块模型Fig.6 Attitude adjustment module model
1.3 末端植入器设计
设计采用齿轮齿条机构驱动外针,硬质摩擦槽轮驱动内针,设计一种近似恒定压力的摩擦轮机构,通过弹簧压紧机构来提供稳定压紧力,保证驱动内针的过程中保持稳定的摩擦力,原理如图7所示,其中,通过精确控制主动摩擦轮的转动角度和圈数加上一定的误差补偿可实现内针进给的精确控制.植入器的结构模型见图8.
1.4 弹匣结构设计
一次粒子植入的用量大约为100~200颗放射性粒子,现有的弹匣结构一般能提供10~20颗放射性粒子.本文采用盘形轨道结构并由涡卷弹簧提供动力设计了大容量自动粒子弹匣,提高了粒子植入效率.弹匣模型图如9所示.

1—粒子托盘;2—密封顶板;3—旋转导向板;4—中轴;5—滑块;6—滑动销;7—卷簧;8—螺钉. 图9 弹匣爆炸模型简图Fig.9 Schematic diagram of cartridge case explosion model
2 运动学分析
文中设计的粒子植入机器人是典型的混联机构.与一般的串联机构相比,虽然结构存在差异,但是运动学分析的实质是一致的[14],采用D-H法进行运动学求解[15].
2.1 粒子植入机器人正运动学分析
粒子植入机器人机构简图如图10所示.

图10 粒子植入机器人机构简图Fig.10 Mechanism diagram of particle implantation robot
基坐标系O0-X0Y0Z0固定在基座上,动坐标系O-XYZ与位置调整模块固连,其他坐标设立如图10所示.其中,m、n、d2、d3为常量,由设计要求确定;zA、xC、d1、θ、β为变量,由运动控制要求决定.将xH、zH、xC、zA理解为变化量,θ、β为相应关节处坐标的回转角度,故式(8)可简化为
(14)
由于Y0方向滑台独立运动,因此只考虑动坐标系O-XYZ下,ON点的坐标关系.
(15)
通过齐次坐标变换可知,目标点ON在基坐标系O0-X0Y0Z0下的坐标矩阵表示为
(xON,yON,zON,1)T=Trans(-m,d1,n)(xN,yN,zN,1)T
(16)
展开后即得到矩阵表达式
(17)
整理得
(18)
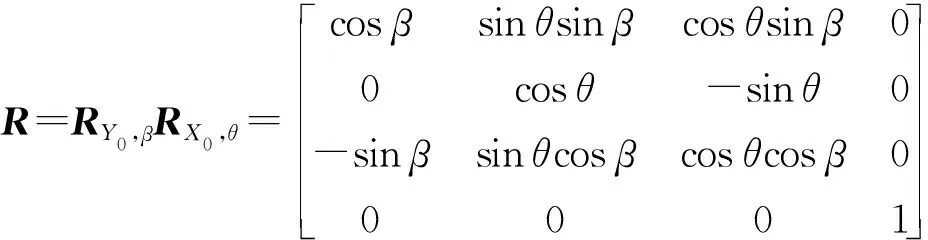
粒子植入器的姿态变化为绕X0轴旋转θ角和绕Y0轴旋转β角,得旋转矩阵R为
(19)
(20)
(21)
因此,机器人末端相对于基坐标的齐次变换矩阵为
(22)
2.2 粒子植入机器人逆运动学分析
由式(18)解得
(23)
式(23)为前列腺粒子植入机器人的位置逆解.
3 仿真分析
3.1 运动学仿真
通过ADAMS/View平台进行运动学仿真分析[16-17],输出定位模块末端的运动曲线,验证其在X、Z两个坐标轴方向运动解耦.驱动添加分为以下2种情况,同时在末端设定2个参考点,基于控制变量原则,分别研究在YOZ平面内Y、Z两方向的运动特点.
第1种情况:前后电机驱动为step(time,0,10,10,10),曲线如图11所示;竖直电机和横向电机的Function(time)选为0,驱动类型Type均选Velocity.

图11 第1种驱动函数曲线Fig.11 The first driving function curve
第2种情况:竖直电机驱动为step(time,0,10,10,10),曲线如图12所示;前后电机和横向电机的Function(time)选为0,驱动类型Type均选Velocity.
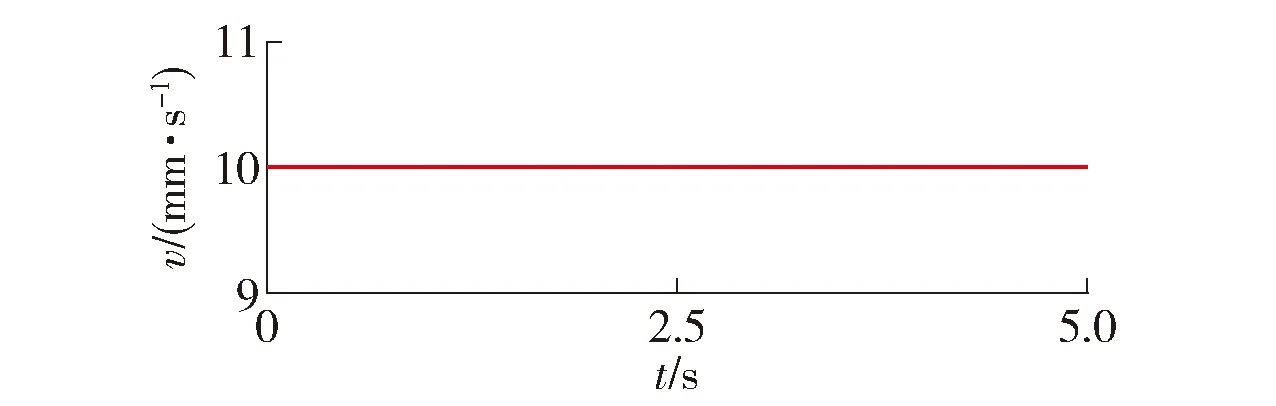
图12 第2种驱动函数曲线Fig.12 The second driving function curve
测量仿真模型末端所设置的参考点1、2速度曲线如图13、14所示. 对比其中参考点1、2的曲线特点可知,式(10)的分析计算结果是正确的,且定位模块在YOZ平面内的解耦,所设计的串联双平行四边形机构可保证该模块运动过程中末端姿态不变.

图13 情况一参考点1和参考点2速度曲线Fig.13 Velocity curve of reference points 1 and 2 in case 1
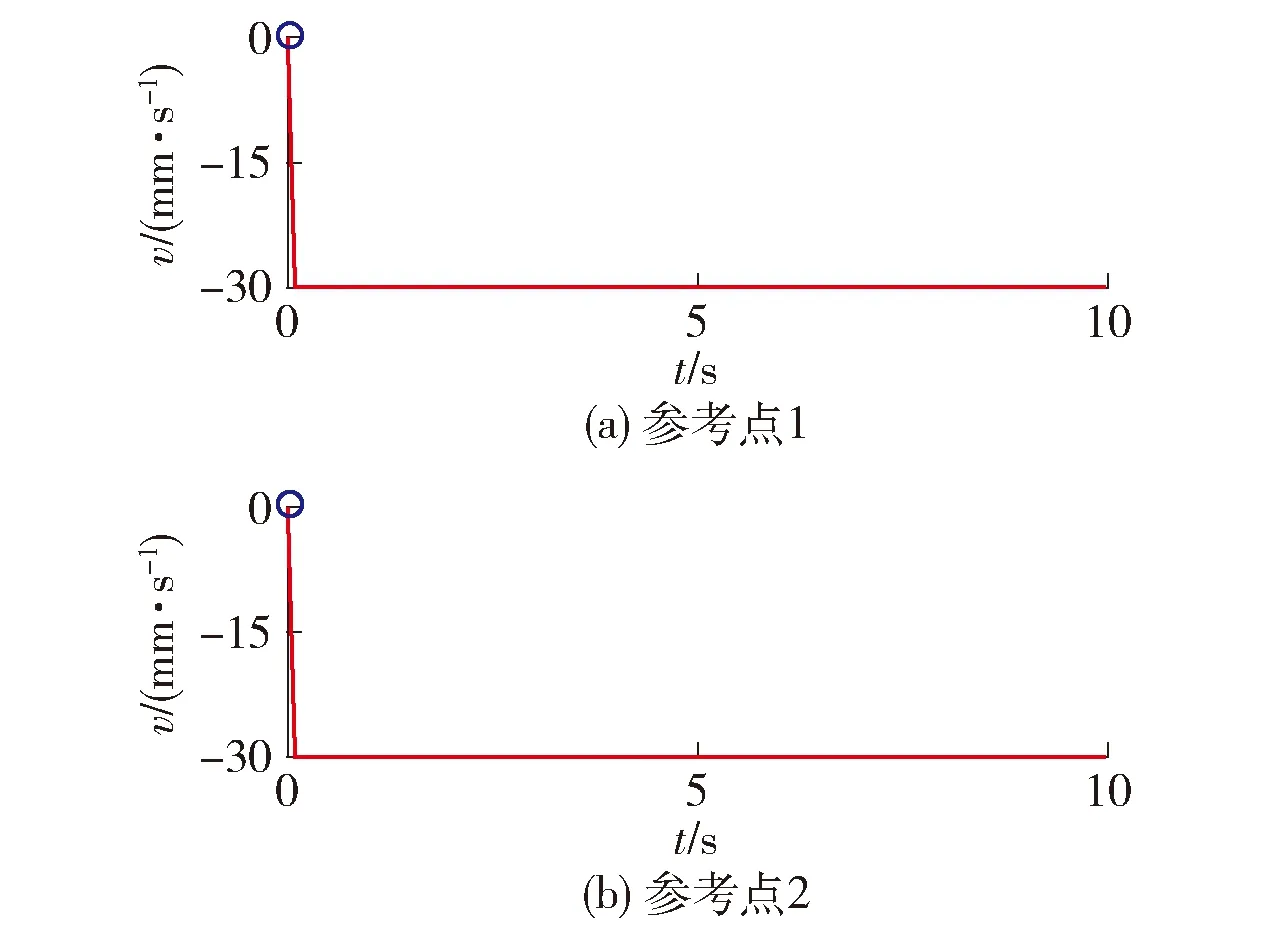
图14 情况二参考点1和参考点2速度曲线Fig.14 Velocity curve of reference points 1 and 2 in case 2
3.2 动力学仿真
在此只分析位置调整模块和姿态调整模块,假设机器人处于一种手术工作姿态为每一个驱动关节分别、独立运动到极限位置. 由于结构的特点,组织进针动作是由粒子植入器来完成,而位置调整和姿态调整工作在组织进针之前完成,故本节对于位置调整模块和姿态调整模块的分析中不必考虑组织进针的阻力大小,只需考虑末端植入器的重力影响即可,而末端植入器以10 N力的形式体现在姿态调整机构的末端. 在5个驱动关节处[18](横向MOTION_hx、前后MOTION_qh、竖直MOTION_sz、滚动MOTION_roll、摆动MOTION_swing)添加驱动力,如图15所示.

图15 驱动力曲线Fig.15 Driving force curve
仿真分析后得到姿态调整模块末端零件LINKAGE04的质心点在X、Y、Z三方向的位置曲线见图16,曲线变化平稳,冲击较小. 速度曲线见图17,曲线变化平稳与运动协调,无明显冲击,系统运动平稳. 加速度曲线见图18,曲线变化合理,冲击在可接受范围内,系统运动较平稳. 因此,所设计的结构具有较好的稳定性.

图16 质心点位置曲线Fig.16 Centroid position curve

图17 质心点速度曲线Fig.17 Centroid velocity curve

图18 质心点加速度曲线Fig.18 Acceleration curve of centroid
4 结论
本文设计了一款3P前列腺癌粒子植入机器人,对其进行了正逆运动学分析及仿真分析.
1) 设计了3自由度运动解耦的位置调整模块,并采用了串联双平行四边形机构实现运动过程中姿态不变. 基于改进的平行四边形RCM机构,消除了RCM机构的运动死点. 粒子植入器外针采用齿条驱动,有效地减轻了结构体积;内针采用槽型硬质摩擦轮驱动,准确保证了进针方向和驱动力. 采用盘形轨道结构并由涡卷弹簧提供动力设计了放射性粒子弹匣,与传统弹匣相比增加了容量并减小了结构体积.
2) 采用了改进的D-H法完成了3P前列腺粒子植入机器人的正运动学和逆运动学分析.
3) 以虚拟样机仿真软件ADAMS为分析平台,进行了运动学仿真分析,验证了理论计算分析的准确性、3自由度位置调整模块为运动解耦,并保证了位置调整模块末端平台水平的可靠性. 而动力学分析结果确定了所设计机构的稳定性.