煤矿局部通风机智能调速设计与仿真
2022-01-20曹建文
曹建文
(1.中国煤炭科工集团太原研究院有限公司,山西 太原 030006;2.煤矿采掘机械装备国家工程实验室,山西太原 030006)
0 引 言
煤矿局部通风机控制系统是煤矿生产安全的重要环节之一,该系统能够为井下工作面提供良好的生产环境,保证煤矿安全生产。对于高瓦斯矿井,瓦斯浓度变化速度较块,对局部通风机调速性能的要求更高。目前,煤矿井下局部通风机普遍采用“一风吹”工作模式,最大程度满足通风需求,但长期运行时存在安全隐患、稳定性不高、节能效果差。有些煤矿采用基于PID 控制的局部通风机控制系统,但无法根据井下瓦斯浓度实时调节局部通风机电动机转速,调速算法落后[1-2]。因此,研究煤矿局部通风机智能调速系统对于提高煤矿井下生产安全性、改善井下工作环境、节约电能具有重要的意义。随着国家智能化矿井建设的不断推进,模糊控制技术、神经网络技术逐渐应用于煤矿智能调速控制系统,如文献[3]设计了一种基于GK 算法的T-S 模糊控制模型的通风机调速系统,增强了通风机调速系统的稳定性;文献[4]设计了一种模糊自调整控制算法,优化了风电机组的运行模式。文章以煤矿局部通风机为研究对象,设计基于T-S 模糊神经网络控制的通风机智能调速方案并完成系统仿真。
1 局部通风机调速方案分析
1.1 PID 调速方案
局部通风机PID 调速是在煤矿井下应用较为广泛的调速方案,将局部通风机的给定转速与反馈转速的差值作为PID 控制系统的输入,表示为式(1):

式中;r(t)为给定转速;y(t)为实际输出转速;e(t)为PID 控制系统输入,即局部通风机转速差值。e(t)变量经比例、积分、微分环节处理后生成PID 处理结果输出量u(t),可表示为式(2):

式中:KP、TI、TD分别为 PID 系统的比例系数、积分时间常数以及微分时间常数。局部通风机控制系统实际实用PID 调速方案时,需将PID 算法进行离散化处理,增量式PID 离散数学公式表示为式(3):

式中:k为采样序号。
采用PID 调速方案对局部通风机进行调速时,只有当系统迟滞性、干扰因素较小时调速效果较好;当系统迟滞性较大、干扰因素较多时,速度超调控制效果较差;在调速稳定性、实时性方面也表现不好。
1.2 模糊调速方案
局部通风机模糊调速是将人工调速经验转化为模糊控制规则,根据模糊控制规则对局部通风机进行调速。局部通风机模糊调速方案不需要建立通风机调速精确模型,适用于非线性、大迟滞性、多干扰源的系统。局部通风机模糊调速方案的一般过程为精确量的模糊化、建立规则库和推理机以及输出量解模糊。清晰化后的输出量可直接作用于被控对象,建立的模糊控制规则库可提高局部通风机调速的可靠性、容错性和鲁棒性。模糊控制原理框图见图1 所示。

图1 模糊控制原理框图
基于模糊控制的局部通风机调速方案效果优于PID 调速方案。局部通风机调速过程与巷道长度、巷道温湿度、瓦斯浓度、风阻等因素息息相关,是典型的非线性、大迟滞、多干扰且复杂的控制系统,要根据巷道内瓦斯浓度的变化实时、自适应的调节风量、风速。经查阅文献发现,要达到局部通风控制系统稳定性高、实时性强、安全性好且节能降耗的目的,必须将神经网络学习与PID 控制、模糊控制相结合进行优化。
2 局部通风机智能调速方案设计
2.1 T-S 模糊控制原理
T-S 模糊控制是由Takagi 和Sugeno 提出的改进型模糊控制模型,由多个模糊控制规则集合组成,其模糊控制规则可由式(4)表示[5]:

式中:Rj为规则集合中的第j 条模糊规则;if之后then 之前部分为前件部分,x为输入量,Aij为第j条模糊规则下的第i个模糊子集,为前件参数;yj为第j 条模糊规则下的系统输出。then 之后为后件部分,pij为第j 条模糊规则下的第i 个参数,为后件参数[6]。T-S 模糊模型的输出可表示为式(5):

其中假定输入变量xj的取值范围为0≤xj≤1,μj为第j 条模糊规则对那个的隶属度,且μj可表示为式(6):

2.2 T-S 模糊神经网络结构设计
T-S 模糊神经网络结构如图2 所示,由前件网络、后件网络2 部分组成。
2.2.1 前件网络
图2 下半部分为T-S 模糊神经网络的前件网络,为4 层结构,分别为输入层、模糊化层、模糊规则层以及清晰化层。输入层的输入量为x=[x1,x2,...,xn]T,网络节点数为n。模糊化层中的一个节点为一个语言变量,节点数为隶属度函数可表示为式(7):

式中:xi为第i组m个节点的输入变量,一般选取为高斯函数[7]。
模糊规则层中的每一个节点代表一条模糊规则,完成规则匹配并计算适应度数值,节点数为N3=m,该层的模糊规则按照式(8)进行计算:
清晰化层主要完成归一化,采用加权平均算法完成,如式(9)所示:

2.2.2 后件网络
图2 上半部分为T-S 模糊神经网络的后件网络,为3 层结构,分别为输入层、规则层以及输出层。规则层需尽心规则匹配,按照式(10)进行:

图2 T-S 模糊神经网络结构

输出层输出结果yi为各条规则的加权值,可表示为式(11):

2.3 T-S 模糊神经网络学习过程
1)后件网络连接权值的确定。

2)前件网络隶属度函数的确定。
前件网络需对隶属度函数cij、σij参数进行确定,其中cij为隶属度函数中心值,由式(13)确定:

式中:β为学习速率[8],为cij的一阶梯度计算式;为隶属度函数宽度,由式(14)确定:

3 局部通风机智能调速方案实现
根据煤矿井下局部通风机工作工艺流程、需风量控制原理,基于T-S 模糊神经网络控制技术,设计的煤矿井下局部通风机T-S 模糊神经网络控制结构如图3 所示,输入参数为电动机转速的偏差e以及转速偏差变化率ec;经T-S 模糊神经网络模糊化、校正、清晰化后输出用于控制变频器运行的频率参数f,由变频器作用于局部通风电动机后输出转速。由转速传感器实时监测电动机实际转速并反馈至输入端进行转速偏差e以及转速偏差变化率ec的计算并实时更新。在本方案中,设定局部通风机给定转速为2 900 r/min,额定风量为625 m3/min。

图3 局部通风机T-S 模糊神经网络控制结构
根据图3 设计的T-S 模糊神经网络控制结构,在仿真平台搭建仿真模型并设定ke值为0.01,kec值为0.000 5,ku值为24。将局部通风机转速偏差e以及偏差变化率ec进行模糊化;然后利用T-S 模糊神经网络对e以及ec进行辨识,并对隶属度函数进行训练,使得输入、输出之间建立精确的映射关系;通过设计的模糊规则输出模糊量并进行清晰化操作,达到对局部通风机电动机转速精确、实时控制的目的。建立的局部通风机T-S 模糊神经网络模型经200 次训练后,误差已达0.078 5,如图4 所示。
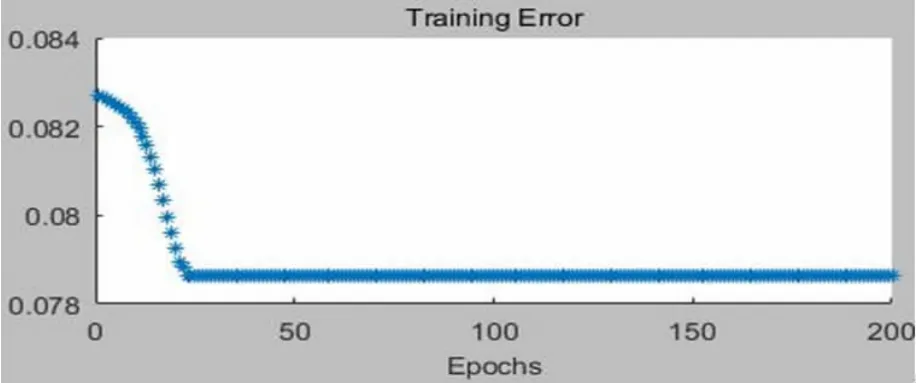
图4 局部通风机T-S 模糊控制模型训练误差
4 系统仿真
根据设计的局部通风机智能调速方案T-S 模糊神经网络控制结构、仿真模型以及设定的仿真参数,在软件平台进行系统仿真,以验证该T-S 模糊神经网络控制模型的正确性和有效性。图5 所示为局部通风机需风量与时间的关系曲线图,在0~10 s 时间内,系统经约2 s 延时后达到稳定输出,为额定风量为625 m3/min,超调时间短。在20 s 时,将局部通风机的需风量突变为525 m3/min,经约2 s 延时后,达到稳定输出;在30 s 时,将局部通风机的需风量突变为575 m3/min,经约2 s 延时后,达到稳定输出。图5 说明,设计的局部通风机T-S 模糊控制之模型的跟随性较好,需风量突变时,在较短时间内能达到温度输出,跟随性好,实时性强,调速效果明显。

图5 基于T-S 控制的局部通风机需风量仿真
为验证设计的局部通风机智能调速方案的优越性,与PID 调速模型进行仿真对比,如图6 所示。调速系统经5 s 延时后,基于T-S 模糊控制模型在较短时间内达到系统稳定输出,且超调量小;基于PID控制模型的超调量较大,且达到系统稳定输出的时间较长。由图6 可知,T-S 模糊控制模型与PID 控制模型相比,在实时性、系统跟随性以及系统超调等方面都具有较大的优越性、安全性和稳定性。

图6 局部通风机需风量仿真对比
5 结束语
1)对煤矿井下局部通风机PID、模糊调速方案进行介绍,并对T-S 模糊神经网络控制原理、结构设计、学习过程机行详细分析。
2)设计基于T-S 模糊神经网络控制的煤矿井下局部通风机智能调速系统,并搭建仿真模型,确定仿真参数。
3)基于仿真平台,对搭建的煤矿井下局部通风机模型进行仿真,绘制局部通风机需风量与时间关系,需风量突变时的响应速度,T-S 模糊神经网络控制方案与传统PID 控制方案效果对比。
4)经仿真对比发现,基于T-S 模糊神经网络控制的局部通风机智能调速方案在实时性、稳定性、跟随性方面表现优越,调速效果较好。
