一种面向车辆编队通信系统的数据元设计思路
2022-01-19谌仪
谌仪
(交通运输部公路科学研究院,北京100088)
随着中国智能交通领域相关技术应用的迅猛发展,智能驾驶等前沿应用技术已经在交通运输行业中得到了极大的关注。近年来在智能驾驶技术的推动下,具备一定智能程度的货运车辆的编队行驶应用开始出现。这一应用方案通过智能化的设备和自动化的管理模式,在实际应用中有效解决了安全和效率方面的诸多问题。因此,货运车辆的编队行驶被业内普遍视为是货运(物流)行业未来的重要应用场景之一,货运卡车自动驾驶编队被认为是最有可能率先成为自动驾驶规模商用的应用场景[1]。
目前国内车辆编队行驶主要以卡车(货运卡车)编队行驶为主,其技术研发、演示验证等工作的推进力量以车辆制造企业和自动驾驶技术研发企业为主。典型企业包括图森未来、智加科技、西井科技、主线科技、赢彻科技、畅行智能等。虽然当前车辆编队应用尚不成熟,但相关企业在货运卡车自动驾驶编队方面的技术研发、演示验证等方面都进行了较大规模的投入。以东海大桥无人驾驶及车路协同编队行驶项目为例,该项目可实现3辆以上卡车编队行驶,并根据引导车工作状态实行加减速、转向、变道等操作,通过先期测试和估算,货运卡车编队可有效提升东海大桥及周边物流枢纽运营和中转效率,并有效降低重型卡车的司机成本和燃油损耗率。智加科技在2019年国际消费电子展(CES2019)上展示了其L4级自动驾驶卡车技术;展会期间,作为唯一一家在展会现场提供实景演示的自动驾驶卡车公司,智加科技还在附近的拉斯维加斯卡车专用车道上展示了搭载上述技术的“International LT”系列牵引车。此外,西井科技、主线科技等自动驾驶企业,也都先后推出了基于自有技术的高等级(L3级或更高级别)的自动驾驶货运车辆。综上所述,智能车辆编队应用将在未来一段时间内进入快速发展阶段,相关产品和应用也将不断涌现。
1 车辆编队应用与车辆通信系统特性
在诸多智能驾驶应用场景中,车辆编队行驶是一类具有明显特征的典型的应用场景。首先,车辆编队主体是智能车辆,编队行驶是基于智能驾驶功能之上的一种复杂程度更高的智能体协同功能[2]。因此,在车辆编队行驶过程中所产生并需要被传输的信息也是非常复杂而多样的。在上述信息中,可能包括车辆状态信息、交通状态信息、道路管控信息和驾驶环境信息等多种类别的信息数据。其次,车辆编队行驶中的车辆位置与车辆通信系统的拓扑结构有着直接的关系。随着车队成员位置的变化、领航车变更等行为的出现,车队无线通信系统的结构也会随时发生改变[1]。最后,智能车辆编队行驶对无线通信网络的数据传输可靠性和时延指标要求很高。当支撑编队的无线通信网络的数据传输可靠性和时延指标无法达到要求的情况下,进入编队的车辆将无法保持与车队其他成员间的关联关系,编队行驶的基本功能将完全丧失。因此可以认为,智能车辆编队应用是高度依赖于车辆无线通信系统的。
与此同时,由于车辆在正常状态下是高速移动的,因此车辆无线通信系统的工作环境是复杂多变的。尤其是在有无线信号干扰、车距过远等情况发生时,车辆无线通信系统的传输性能将会明显降低。因此在实际应用中,车辆无线通信系统能够提供给用户的数据传输容量,要比理论计算的数据传输容量低很多。车辆无线通信系统的用户面临着压缩精简用户数据的现实问题。
2 主要车辆通信应用层技术规范
车辆通信系统应用层相关的国际标准目前主要包括《3GPPTS22186-V2X用户数据需求》《SAEJ273专用短程通信消息字典》和《ETSI 102.637车辆通信系统基本应用集》等[3]。在综合考虑上述国际标准内容的基础上,中国相关组织研究编制形成了团体标准,即T/CSAE 53—2017《合作式智能运输系统 车用通信系统 应用层及应用数据交互标准》。该标准是目前中国智能汽车、通信等产业中认可度较高的一项标准规范。该标准从应用定义、主要场景、系统基本原理、通信方式、基本性能要求和数据交互需求6个方面对17个应用场景提出相关要求。其中所规定的消息层数据集是典型的车辆通信系统应用层数据集。
T/CSAE 53—2017消息层数据集用ASN.1标准进行定义,遵循“消息帧—消息体—数据帧—数据元素”层层嵌套的逻辑进行制定。数据集交互的编解码方式遵循非对齐压缩编码规则UPER(Unaligned Packet Encoding Rules)。消息层数据集由1种消息帧格式和5种基本消息体(Message)组成[4]。5种基本消息体具体包括车辆基本安全消息、地图消息、路侧设备消息、路侧安全消息、信号灯消息。各类基本消息体的具体说明如下。
车辆基本安全消息。车辆基本安全消息是使用最广泛的一个应用层消息,用来在车辆之间交换安全状态数据。车辆通过该消息的广播,将自身的实时状态告知周围车辆,以此支持一系列协同安全等应用。
地图消息。由路侧单元广播向车辆传递局部区域的地图信息,包括局部区域的路口信息、路段信息、车道信息,道路之间的连接关系等。单个地图消息可以包含多个路口或区域的地图数据。
路侧设备消息。该消息适用于由路侧单元向周围车载单元发布的交通事件信息以及交通标志信息。其中,交通事件信息当前支持国标GB/T 29100,交通标志信息当前支持国标GB 5768.2。
路侧安全消息。路侧单元通过路侧本身拥有的相应检测手段,得到的其周边交通参与者的实时状态信息(交通参与者包括路侧单元本身、周围车辆、非机动车、行人等),并将这些信息整理成本消息体所定义的格式,作为这些交通参与者的基本安全状态信息,广播给周边车辆,支持这些车辆的相关应用。
信号灯消息。包含了一个或多个路口信号灯的当前状态信息,结合地图消息,为车辆提供实时的前方信号灯相位信息。
此外,规范还定义了构成基本消息体的53类数据帧,构成数据帧的各类涉及车辆运动、控制、道路环境等方面的各类数据要素。
3 实际应用问题与解决对策
T/CSAE 53—2017在目前的智能驾驶相关测试和示范应用被广泛使用。虽然该规范所规定的17类应用场景中没有明确包括车辆编队行驶的应用场景,但其中的部分应用场景是有可能在智能车辆编队应用中出现的。例如,T/CSAE 53—2017中对7个车-车协同应用场景进行了详细地场景流程描述。通过场景过程描述分析可以发现,与车辆编队控制直接关联的有两个场景,即“前向碰撞预警”和“紧急制动预警”。上述两个场景也是车辆编队控制中必须包含的应用场景,即在车辆编队行驶过程中一定会存在“前向碰撞预警”和“紧急制动预警”情况,且这两种场景将会频繁出现。与此类似的还包括“道路危险状况提示”和“限速提醒”等应用场景。基于上述原因,T/CSAE 53—2017在智能车辆编队应用中是具有较高的使用参考价值的。同时考虑到智能车辆编队应用中的成员车辆在一些特殊情况下,可能脱离编队进入到单车智能驾驶状态,智能车辆编队应用采用共识度较高的T/CSAE 53—2017作为统一的应用数据标准将产生更好的工程实施效果。
但直接利用T/CSAE 53—2017的规范数据要素进行车辆编队应用数据的设计是不合适的。T/CSAE 53—2017的数据要素设计是面向一般车辆通信应用场景的,并未考虑车辆编队应用数据的复杂多样、逻辑关联关系多变、高可靠传输和低时延传输的需求。通过对与智能车辆编队应用高度关联的基本应用场景分析,可以发现T/CSAE 53—2017中所规定的可以支撑智能车辆编队应用的消息体或数据帧,都是由数据格式固定、容量不变、精度统一的数据要素构成。如果直接使用T/CSAE 53—2017规定的数据要素构建智能车辆编队应用数据,当车队成员数量逐步增加时,车辆通信网络的应用数据负载将与车队成员数量成正比关系增加,这就直接限制了编队车辆的数量。
为了解决上述问题,就要考虑在多车辆编队行驶的应用场景下,如何既要满足应用信息传输的需求,又要有效降低车辆无线通信网络应用数据负载。通过对车辆通信一般应用场景的进一步研究发现,在很多情况下车辆通信系统所传输的信息包含了大量的冗余数据。以T/CSAE 53—2017车辆基本安全消息为例,该消息中包含了车辆位置、时间戳、车辆身份等重要信息。但在不同的应用场景中,对车辆位置、时间戳等信息的需求必要性和精度要求是有很大区别的。如果应用目标是对车辆进行准入判定,此时车辆位置就是不必要的冗余信息,而车辆身份则是应用的关键信息。如果应用目标是车辆行驶中的碰撞避让,则情况与上述应用正好相反。
基于上述分析可知,由于现有规范数据要素的固化设计,导致了一定程度的应用层冗余数据传输。这就为解决车辆通信系统应用数据负载问题提供了一个较为可行的技术优化思路,即:通过改变原有数据要素的固化设计方法,通过格式可选、容量可变、精度可调的数据要素,构建具有一定载荷弹性的用户数据,通过与应用场景的高度匹配,最大程度上降低冗余应用数据的出现,进而降低车辆通信网路的用户数据负载量。
4 数据元弹性载荷设计思路
综合考虑车辆编队的应用需求、主要应用场景特点等因素,将车辆编队通信系统所需要传输的应用数据进行抽象凝练后可以发现,任何应用数据都是至少由时间、地点、事件/指标值和信息质量构成的。因此可以认为车辆编队通信系统应用层数据由时间数据要素、空间数据要素、事件/指标值数据要素和质量数据要素构成。
空间数据要素是指信息来源的平面位置,一般可以由绝对位置(经纬度数据)来表达,也可以由相对位置(相对距离)来表达[5]。考虑到不同应用的需求,空间数据要素应当至少能支持上述两种表达方式。绝对位置不依赖位置参考点,其精度更优、适用场景更广;相对位置依赖参考点,但可以简化为整型数据并使用较少的数据位来准确表示目标位置。
与空间数据要素类似的,时间数据要素也可以面向不同应用场景的采用不同的表达方式。由于时间数据要素在不同的应用中的数据精度要求和范围跨度要求差别巨大,时间数据要素可根据实际需求对年份、月份、日、小时,直至秒、毫秒等内容进行独立使用或组合使用,以适应不同应用场景对时间数据跨度和精度的要求。
对时间、空间数据要素进行统一格式的规范后[6],形成的时空数据元的基本逻辑内容和数据容量都可以根据实际使用要求进行调整。依照本设计思路形成的数据元逻辑内容示意及示意内容说明如表1所示。
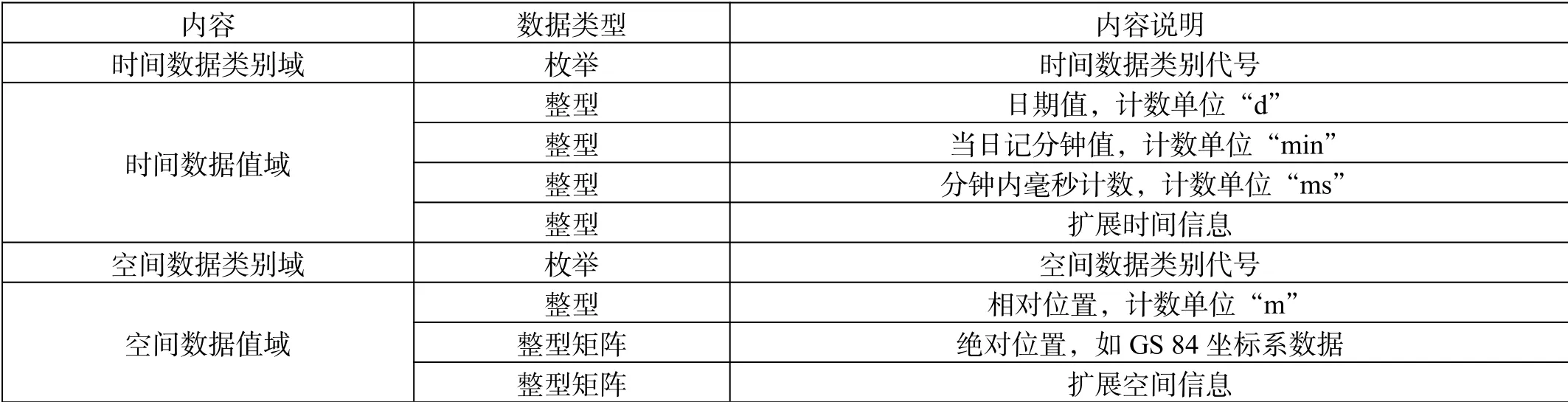
表1 时间空间数据元逻辑内容设计示意
事件/指标值数据要素和质量数据要素,也可根据场景进行不同的表达方式设计,但设计过程中需要考虑的因素更多,如传感设备的技术水平、事件检测算法的可用性等。
本文仅以空间数据元和时间数据元设计方法为例说明弹性数据元设计方法的主要思路,具体设计内容不再赘述。根据空间数据元和时间数据元的逻辑内容和容量估算情况,可以看出上述两类数据元所对应的数据要素,均是格式可选、容量可变、精度可调的数据要素。理论上看,使用上述结构设计的空间数据元和时间数据元就能够构建形成具有弹性载荷的车辆通信应用数据,并有可能通过适当的应用场景匹配,达到“需要什么,传输什么”的应用效果。这也就意味着,弹性载荷数据元为降低冗余应用数据的传输提供了基本条件[7]。
5 应用展望
面向车辆编队通信系统的弹性载荷数据元的设计方法,实际是从车辆编队应用的面临的实际问题出发,寻求到的一种更为灵活的数据元设计方法。该设计方法形成的弹性载荷数据元,不仅仅局限于智能车辆编队通信系统的使用。在工业制造、无人机应用等任何多智能体协同应用中,弹性载荷数据元的设计和应用方法都具有一定的借鉴价值。
