Bang- Coast- Bang 控制在桥式起重机控制系统中的实现
2022-01-18高全胜
高全胜
(常州纺织服装职业技术学院,江苏 常州 213164)
桥式起重机在工业中扮演着至关重要的角色。它们在船坞、建筑工地、钢厂、仓库、核电和废物储存设施中广泛使用。桥式起重机在移动货物时候,货物会来回的摆动[2],影响装载效率,有时候还会带来一定的危险[1-3]。因此,如何控制有效载荷摆动,是桥式起重机的稳定运行的重要问题。桥式起重机系统有效载荷可以建模为一个点质量,悬索建模为一个刚性链接,并且连接到小车上。对小车施加激励命令信号,有效载荷的运动使用二维模型来描述。事实证明,对小车加速度命令控制是减少有效载荷摆动的有效方法[4-5]。本文使用优化方法找到最佳的bang-coast-bang 加速度基函数[6]。优化加速函数以最小化有效载荷的摆动。将动态方程应用于简化的桥式起重机模型,并使用Matlab 中的符号计算工具包导出各个关系式,再利用优化工具包,对其求解。
1 桥式起重机数学模型
简化后的桥式起重机由可移动小车、载荷和悬索构成如图1 所示。
这里,r 是悬索的长度,m 是载荷的质量,M是小车的质量,θ 是悬索相对于垂线的角度,逆时针为正。x 是小车位置的横坐标。
下面根据系统模型求出系统的运动方程。欧拉- 拉格朗日运动方程为

其中n 是系统的自由度,q={q1,…,qn}是一组广义坐标。其中,L 为拉格朗日函数:L=T-V,是n 自由度的系统动能和势能之间的差。当前桥式起重机系统模型只有两个自由度,我们选择q={x,θ}作为广义坐标。使用Matlab 中的符号计算工具包可以导出以下各个变量的表达式。其中,小车的速度为:

小车的运动为水平运动,因此,势能的计算只需考虑载荷即可,系统的势能为:

2 数值仿真
Bang-Coast-Bang 加速度控制能够减小载荷的摆动,又能高效地将货物送至目的地。有两个主要因素影响有效载荷摆动角的值:小车行进的距离,以及加速度命令中两个脉冲的宽度(见图2)。系统优化可以归结为:加速段、滑行段以及减速段的时间分配优化问题。设小车移动路径长度为x=40m,加速段时长为t1=4.5s,滑行段时长为t2=10s,减速段时长为t3=4.5s,小车在经过加速、滑行、减速后,经过x 长的位移后静止下来,距离、加速度与时间存在如下关系:


图2 Bang-Coast-Bang 加速指令
3 系统优化
小车的加速指令如图2 所示,可以看出小车经过加速、滑行、减速三个阶段。图3 显示载荷在整个过程中不断摆动。当小车停止运动时,载荷还在继续摆动(阴影区域)。优化的目标就是:当小车停下来的时候,载荷也应该停止摆动,保存静止。因此应该设置优化目标为载荷摆角函数积分的绝对值为最小:

图3 载荷的摆动

由于小车运动距离是固定的,从系统的动力学方程(6)以及距离、加速度与时间关系式(7),可以看出摆角θ 是加速段时长t1、滑行段时长t2、减速段时长t3 的函数。为方便优化,引入新的变量tf=t1+t2+t3,表示整个加速段、滑行段、减速段总的时间长度。将优化约束条件设置为:

优化初始值设置为t1=4.5s,t3=4.5s,tf=19s,优化目标函数为(10)式,使用Matlab 的优化工具箱,经过几轮迭代可以找到目标函数的局部最小值。
根据公式(7)和(8)可以计算出优化后的加速度如图4,这就是优化后的Bang-coast-bang 加速指令。从图5 可以看出优化后,小车停下后,载荷也同时静止下来,实现了我们的优化目标。

图4 优化后的Bang-Coast-Bang 加速指令
与时间最优控制相关的一个缺点是它无法实时实施,因为需要预先计算系统轨迹,因此没有用于起重机的时间最优控制方法[2]。也就是说,此类桥式起重机优化问题没有一个全局最优解,只包含多个可行的解。所以我们要确保没有错过其他更好的解。一种方法是求解具有不同初始条件的优化问题。借助matlab的全局优化工具箱,可以设定多个初始值求解。由于求解器的每次运行都是独立的,可以并行运行以加快进程。
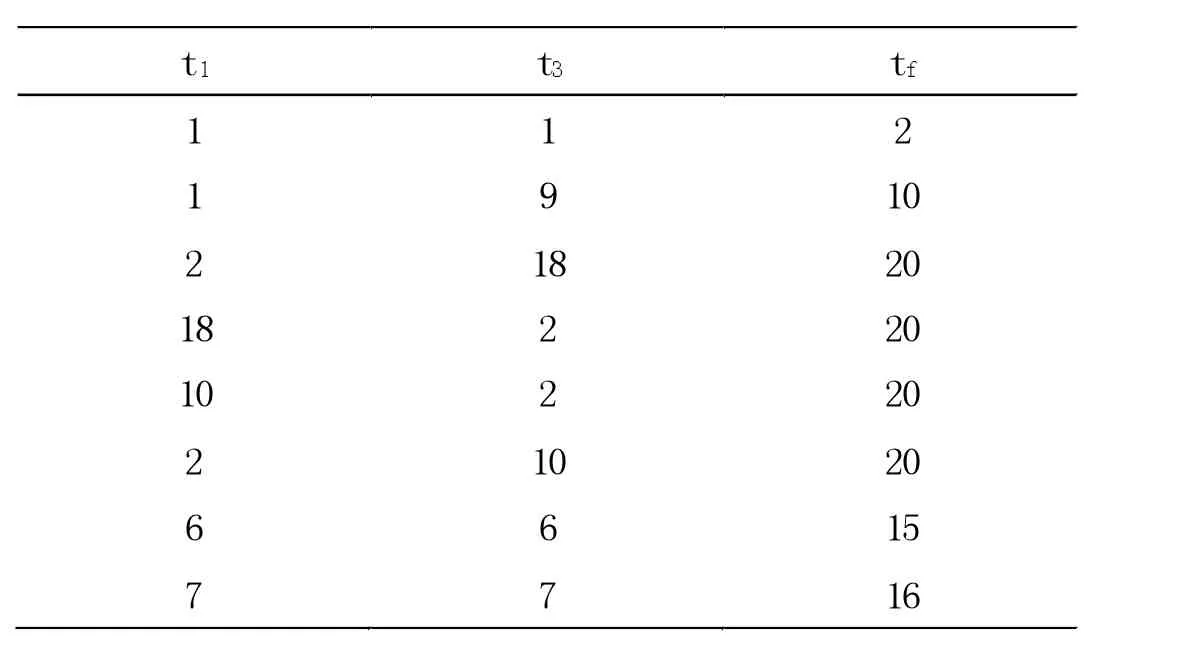
表1 不同的初始值
图6 显示的是前3 个最好的优化结果,这是由不同的初始值生成的。
从图6 可以看到,虽然有效载荷在完成后保持稳定,但不同的优化结果会导致运动过程中出现较大的摆角振荡。下面将最大振幅限制为小于±5 度。我们通过向添加额外的非线性约束来做到这一点。图7 显示了前3 个可行的新的优化结果。从这些新的优化结果可以看出载荷摆动被限制在5 度以下。

图6 多个初始值的优化结果
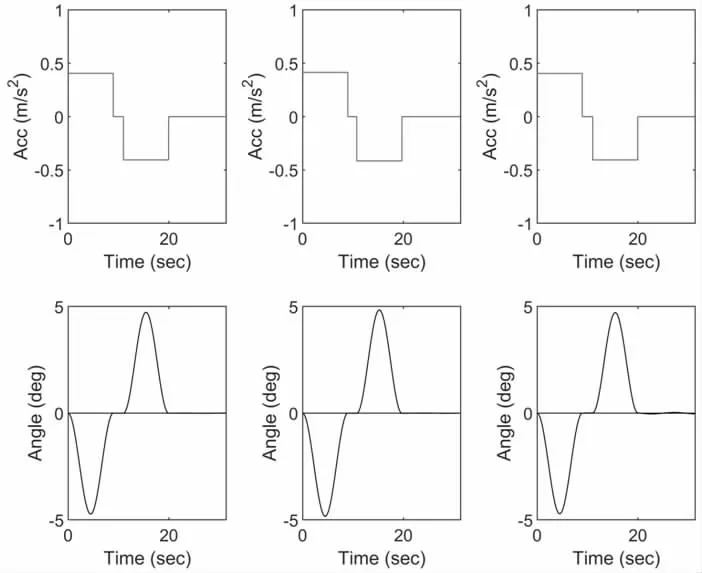
图7 增加摆幅限制的优化结果
4 结论
本研究将Bang-Coast-Bang 控制应用于桥式起重机优化控制中,建立了系统的数学模型,在matlab 中进行仿真。仿真结果表明:该控制器实现了良好的定位精度和显著减少摆动效果。
