大型阀门快开系统设计与性能研究
2022-01-17赵丽丽吕慧杰李忠泉袁露露
赵丽丽 吕慧杰 李忠泉 袁露露


摘要:以大口径管道阀门为研究对象,为满足快速泄复压要求,设计了大型阀门快开系统。研究了采用比例换向阀和比例调速阀的大型阀门快开系统的稳定性;阀门在不同开度下的泄复压效果;以及系统最优的泄复压控制方案的选择。仿真结果表明:该系统满足稳定性要求;系统采用比例换向阀的泄复压性能优于采用比例调速阀的泄复压性能;采用比例换向阀的大型阀门快开系统,当阀门开度为70°时,系统的泄复压效果控制最佳。
Abstract: In order to meet the requirement of rapid relief of compound pressure, a large valve quick opening system was designed, and a simulation model was established to study the stability of the large valve quick opening system using proportional directional valve and proportional speed regulating valve. The relief and compound pressure effect of valve under different opening degrees; The simulation results show that the system meets the requirement of stability. The compound pressure relief performance of the system using proportional directional valve is better than that of the system using proportional speed regulating valve. Adopt the large valve quick opening system of proportional reversing valve, when the valve opening is 70, the control effect of relief and compound pressure is the best.
關键词:阀门快开系统;阀门开度;泄复压性能
Key words: quick opening system of valve;valve opening;compound pressure relief performance
中图分类号:TP215 文献标识码:A 文章编号:1674-957X(2022)02-0101-03
0 引言
大型阀门快开控制系统常用于航天航空领域中[1]。在航空航天领域中,载人航天器的密封舱具有泄复压功能,它可以用来平衡气闸舱的内外压力,从而保证航天员安全、方便地进出航天器,使飞行任务顺利完成[2]。目前比较常用的泄压方式有快开盲板阀控制,这种控制方式的加工拆装方便,应用范围较广,但在操作时泄压阀的开关不够灵活,有时会出现卡阻的现象,导致快开门无法快速打开进行泄压;汽轮机控制的泄压方式结构简单,控制精度较高,同时也具有自锁功能,工作性能较好,但在工作过程中经常会发生吸油中断的现象,导致系统无法完成泄压;泄复压系统控制的泄压方式,这种控制方式可以控制系统泄压的数值,从而对系统泄压速率进行调节,可操作性比较强,但在使用过程中通常具有复压的精度及稳定性不够的特点[3]。
本文拟采用液压系统控制大型阀门的开闭情况,液压系统的控制精度高、响应快,能够保证系统连续、快速的工作。在该控制系统中,比例换向阀和比例调速阀的选取,以及大型阀门的开度,都对系统的泄复压性能产生很大的影响。本文设计了阀门快开液压控制系统,在PID控制下,对采用比例换向阀和采用比例调速阀控制系统的性能分别进行仿真研究,并对采用比例换向阀的大型阀门处于不同开度时的控制系统进行仿真研究。
1 大型阀门快开系统设计
该大型阀门快开控制系统为液压控制系统,该系统具有反应速度快、质量轻的特点。出于经济性考虑,系统中的液压泵选用造价较低的定量泵;为了使液压缸能够进行双向运动,选用单杆双作用液压缸;在系统工作过程中,要求液压缸的运行速度稳定,故选用比例调速阀;要求系统工作时的压力恒定,所以选用比例溢流阀。根据设计要求进行系统各元器件的选取,大型阀门快开系统工作原理如图1。当换向阀左位工作时,液压缸做快速伸出运动,液压缸推动大型阀门的阀板快速旋转打开;换向阀右位工作时,液压缸做回程运动,阀板快速旋转闭合;当换向阀位于中位时,系统恢复初始状态。
2 大型阀门快开系统的建模与仿真
2.1 仿真模型的建立
本文采用液压系统控制大型阀门的开闭,为研究该液压系统在航天器密封舱的泄复压性能,需要对该液压系统进行仿真研究。常用的液压系统仿真软件有Hopsan、FluiSIM、AMESim等。Hopsan仿真软件可以对系统性能进行预测,并通过仿真对系统进行整体分析,提高系统稳定性;FluiSIM仿真软件可以实现显示和控制回路的动作,能够正确估计回路的工作状态,缩短设计工作时间,在设计中发挥导向作用;AMESim仿真软件是基于键合图的液压、机械系统进行建模,软件对液压系统中的大多数元件都有相对应的子模型,在此基础上对液压系统进行仿真和计算,研究系统的稳定和动态性能,同时,AMESim软件操作简单,更符合本设计的使用要求。
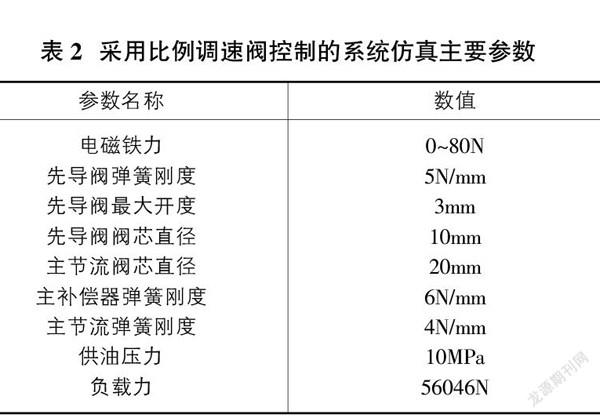
根据系统的工作原理,在AMESim仿真软件中,可以对液压系统进行检测,根据仿真结果分析阀门快开系统的快速性以及平稳性。分别对比例换向阀和比例调速阀进行模型搭建[3],采用比例换向阀的大型阀门快开系统,其系统的仿真主要参数如表1所示。采用比例调速阀的大型阀门快开系统,其主要的仿真主要参数如表2所示。根据仿真结果分析系统的动态响应性能。
2.2 采用比例换向阀与采用比例调速阀控制的快开系统仿真结果分析
2.2.1 采用比例换向阀的仿真结果分析
对采用比例换向阀的控制系统进行仿真分析,采用比例换向阀的大型阀门快开系统液压缸在4.2秒左右时开始响应,并在1秒之内液压缸速度迅速达到近乎最大值,之后,液压缸的运行速度随时间的增加有较小的波动,在运行到15秒左右时系统开始减速,并在2秒之内速度很快减小到0停止运动。液压缸随着系统的响应在4.2秒左右开始做伸出运动,随着速度的增大在接近15.9秒时伸出位移达到最大值,最大位移约为0.28米。系统在17.7秒完成泄压,在18.64秒完成复压。由上述結论不难得出,该系统在响应过程中可以保证系统的准确性、快速性和稳定性。在采用比例换向阀的控制系统中,得出在PID控制下,液压缸的位移随时间的变化曲线和液压缸的速度随时间变化曲线,其仿真结果如图2所示。
2.2.2 采用比例调速阀的仿真结果分析
采用比例调速阀的大型阀门快开系统液压缸在5.3秒左右时开始响应,并在1秒之内液压缸速度迅速达到近乎最大值,之后,液压缸的运行速度随时间的增加有较小的波动,在运行到15.5秒左右时系统开始减速,并在2秒之内速度很快减小到0停止运动。液压缸随着系统的响应在5.2秒左右开始做伸出运动,随着速度的增大在接近16.9秒时伸出位移达到最大值,最大位移约为0.28米。系统在18.7秒完成泄压,在19.56秒完成复压。在采用比例调速阀的控制系统中,得出在PID控制下,液压缸的位移随时间的变化曲线和液压缸的速度随时间变化曲线,其仿真结果如图3所示。
2.3 阀门在不同开度时系统泄复压总时间的仿真结果分析
根据对采用比例换向阀和采用比例速阀控制系统的分析可知:采用比例换向阀的泄复压性能更好。大型阀门控制系统泄复压的总时间等于阀门的开启时间和航天器充气放气时间的总和。大型阀门开启的时间和航天器的充气与放气的时间受阀门开度影响,所以可以进一步研究阀门在不同开度时系统的泄复压时间,根据系统的仿真结果,找到阀门的最佳开度参数,在大型阀门的最佳开度下可以缩短系统的泄复压总时间。本文在采用比例换向阀的控制系统中,分别对阀门开度为60°、65°、70°、75°、80°、85°、90°的控制系统进行仿真研究,得到大型阀门在不同开度时,液压缸的位移、速度随时间的变化曲线,阀门在不同开度下的仿真结果如图4所示。
由图4可以得出,在PID控制下,采用比例换向阀的大型阀门快开系统,当阀门开度为70°时,系统充气时间为4.04秒,放气时间为2.74秒,阀门开启时间为13.2秒,泄压时间为15.94秒,系统复压时间为17.59秒。在采用比例换向阀控制大型阀门的泄复压系统中,当大型阀门开度为70°时,系统的泄复压效果最佳。该控制系统在工作过程中,泄复压的速度较快,同时具有一定的准确性和稳定性。
3 结论
①在PID控制下,分别对采用比例换向阀的大型阀门快开控制系统和采用比例调速阀的大型阀门快开控制系统进行仿真,仿真结果表明采用比例换向阀的控制系统的泄复压性能优于采用比例调速阀的控制系统的泄复压性能。
②在PID控制下,采用比例换向阀的大型阀门快开控制系统,在阀门不同开度时进行仿真,仿真结果表明大型阀门开度为70°时,系统泄复压响应时间最短。
该研究为大型阀门快开系统的研发与改进提供了理论的指导。
参考文献:
[1]宋虎堂.阀门选用手册[M].北京:化学工业出版社,2007:50-55,552.
[2]陈善广.航天员出舱活动技术[M].北京:中国宇航出版社,2007:138.
[3]孙刘恒,杨继敏,周飞,等.新型泄压返粉工艺在高炉喷煤中的应用[J].天津冶金,2018(02):22-24.
[4]余佑官,龚国芳,胡国良.AMESim仿真技术及其在液压系统中的应用[J].液压气动与密封,2005(3):28-31.
[5]刘国平,胡诗峻,龚琦.基于AMESim的比例方向阀阀芯受力建模与仿真[J].机床与液压,2019,47(13):137-139.
[6]张豪阳,李二欠,吕德瑾.基于MATLAB与AMESim的液压系统仿真特点[J].煤矿机械,2016,37(07):163-165.
[7]张原,张永祥,陈赟.基于模糊PID控制的火炮随动系统 [J].科学技术与工程,2012,12(19):4630-4633.
[8]王敏,王晓虎,张满栋.三位四通方向阀仿真平台的设计与应用[J].机床与液压,2018,46(08):58-61.
[9]梁全,谢基臣,聂利卫.液压系统AMESim计算机仿真进阶教程[M].北京:机械工业出版社,2017:2-5.
[10]廖义德,王帅.基于AMESim的电磁比例换向阀的测试系统仿真与实验研究[J].湖北民族学院学报(自然科学版),2017, 35(02):209-211,215.
