基于云理论的电磁悬浮系统控制回路性能评估
2022-01-16王凡鑫徐俊起荣立军宋一锋
倪 菲,王凡鑫,徐俊起,荣立军,宋一锋
(1.同济大学国家磁浮交通工程技术研究中心,上海201804;2.同济大学道路与交通工程教育部重点实验室,上海201804;3.同济大学交通运输工程学院,上海201804)
控制系统存在一个或多个控制回路,这些控制回路在运行初期都表现出优良的控制性能,但经过长时间运作后,往往会出现过程和扰动特性变化、传感器和执行器故障以及设备运行出错等情况,导致控制回路运行状态不佳,甚至出现系统瘫痪的严重后果[1]。因此,针对控制回路进行定期的维护和检修是十分必要的,而有效维护的前提是实时掌握控制回路的运行状态。
1989年,Harris[2]应用时序分析工具,根据单输入单输出系统的常规运行数据得到反馈控制无关量的表达方法,并将其作为基准评估控制回路性能,形成了控制回路性能监控领域的新框架。此后,Harris评估方法被推广到非最小相位与不稳定极点系统以及多输入多输出系统,并且扩展到频域信号分析。其中,Grimble[3]鉴于神经网络与数据挖掘等人工智能方法处理非线性问题的优势,将广义最小方差评估理论推广到非线性系统;Harris等[4]利用NARMAX(nonlinear auto regressive moving average with xogenous inputs)模型对一类非线性动态随机系统建立了性能基准。当前研究的重点包括非线性或时变系统的控制性能指标、突变下模型的有效性以及模型预测控制的性能监控与评价等。
控制回路性能评估的基本思想是从闭环运行的过程数据中提取性能度量指标,对控制回路进行诊断并提出改进措施。控制回路的性能指标主要包括3种类型,分别是确定性性能指标、随机性性能指标和鲁棒性性能指标[5]。确定性性能指标为关于控制回路动态品质的时域和频域指标,是一种传统的控制回路性能评价标准。随机性性能指标主要描述控制回路性能的统计特征,利用实际运行数据和少量模型先验知识来评估性能。由于运行数据本身能够反映现场噪声情况,因此无需对控制回路实施扰动实验。鲁棒性性能指标则着重考虑控制回路在发生过程摄动和模型失配条件下的稳定性和品质变化。一个好的控制回路不仅要对确定性和随机性扰动有良好的抑制能力,还应具有应对摄动和失配的强鲁棒性。
经典随机性评估方法起源于Harris提出的基于最小方差控制(MVC)的性能指标[2],并给出了“反馈不变项”,即无论控制器的参数如何调节,此部分的值都不会减少,也即控制器性能达到最优时,系统所能达到的最小方差,并以此作为性能评估的基准。然而,由于MVC的计算需要系统的先验知识,因此仍具有依赖数学模型的局限性。Gerry[6]提出以系统性能良好时的历史运行数据作为基准;Yu等[7]以待测数据与历史基准数据的协方差矩阵的行列式比值作为指标评估了多变量控制回路性能;李晨[8]以协方差矩阵所代表的超椭球体相似度定义了性能指标,相似度越大说明与基准性能的差距越小;Wu[9]引入Kullback-Leibler(KL)距离,利用KL距离量化监视周期和基准周期之间闭环输出数据分布中的差异,定义了一种新型性能指标;张光明等[10]和Xu等[11]引入马氏距离来表征主元和误差子空间的信息变化,从而实现性能评价。
Li等[12]于1998年针对模糊集合论中的隶属函数提出了隶属云的新思想,为云理论的发展奠定了基石。随后,李德毅等[13]又在模糊集合论隶属函数局限性的基础上给出了隶属云的定义及其数字特征,同时通过隶属云发生器的数学模型探讨了隶属云发生器的实现技术和应用场合。20世纪90年代初期,李德毅院士在传统模糊数学和概率统计的基础上提出了定性定量互换模型,这标志着云理论的诞生。云模型主要反映了概念的2种不确定性:即模糊性(边界的亦此亦彼性)和随机性(隶属度的随机性)。它将模糊性和随机性有机地结合在起来,研究自然语言中最基本的语言值所蕴含的不确定性的普遍规律,使得从语言值表达的定性信息中获得定量数据的范围和分布规律成为可能,也使得把精确数值有效转换为恰当的定性语言值成为可能。近年来,云理论随着云模型在不同领域的应用而不断完善[14-15]。
电磁悬浮系统作为磁浮列车的核心部件,是由悬浮控制器、斩波器、传感器、电磁铁等几个部分组成的闭环控制回路[16-17]。其中,悬浮控制器和斩波器是构成悬浮控制单元的主要部分。悬浮控制器根据悬浮间隙的给定值、悬浮间隙传感器反馈的实际间隙值、加速度值以及电流传感器反馈的经过电磁铁线圈的电流值,应用控制策略计算输出控制脉冲,控制斩波器开关管的通断时间,从而调节悬浮电磁铁的线圈电流大小,使得悬浮间隙能够始终保持在额定值及其允许波动范围内,实现列车的稳定悬浮[18-20]。在磁浮列车的运行过程中,随着时间的推移,由于外部扰动、传感器灵敏度下降等原因悬浮控制回路性能受到显著影响。因此,电磁悬浮系统控制回路性能评估对保障磁浮列车安全、稳定地运行十分必要。
目前,针对电磁悬浮系统的性能分析,大量研究关注于系统的动力学稳定性和运行平稳性。周又和等[21]根据磁浮车辆-轨道系统动力学方程,给出了采用Lyapunov特性指数判别动力系统稳定性的判据。洪华杰等[22]建立了简化的车-轨耦合系统数学模型,基于奈奎斯特稳定性理论得到了车-轨耦合系统稳定的充分性条件。黎松奇等[23]分析了常导电磁型磁浮车辆的动力稳定性,根据系统渐进稳定条件下模型系数之间的关系,给出了快速判断稳定性的判据。宋荣荣[24]利用模糊综合评价方法建立悬浮控制器的评价模型,基于层次分析法将多指标融合为一个单指标形式。Sun等[25]提出了一种利用物联网和自适应模糊控制器实现中低速磁浮列车悬浮控制的新方法。上述研究内容着眼于特定干扰下能够保障电磁悬浮系统稳定性和鲁棒性的控制器设计,尚未涉及针对列车在运行过程中控制回路工作性能的分析。Yu等[26]通过自定义指标来量化悬浮系统在列车运行过程中特征变量的波动情况,从而反映悬浮品质的变化,并利用支持向量机和聚类的方法评估不同工况下的系统性能,但该方法未考虑多变量之间的相关性,并且未提出一个整体的性能指标。Song等[27]首次将控制回路性能评估领域2种常用经典指标体系引入电磁悬浮系统,并基于磁浮列车运行的实测数据进行了数据驱动下的控制回路性能评估。
针对当前电磁悬浮系统控制回路性能评估面临的主要问题,采用随机性性能指标进行控制回路的性能评估,根据运行数据的统计特征,分析控制回路的工作状态,开展多变量控制系统的性能评估。
1 电磁悬浮系统
常导电磁型磁浮车辆由若干个悬浮点支撑,如图1所示。每个悬浮点实质为由悬浮架、轨道和悬浮控制器构成的悬浮控制系统,直接影响着列车运行的稳定性和舒适性。
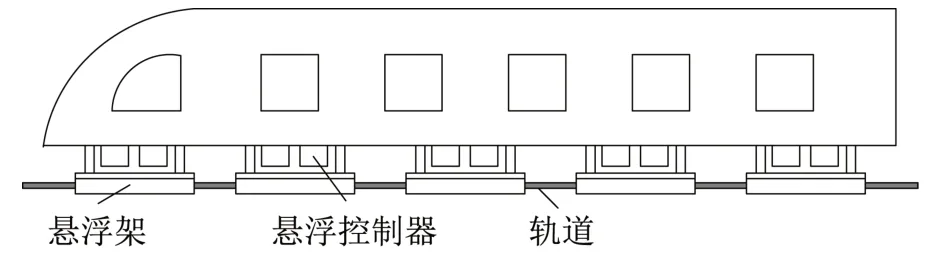
图1 磁浮车辆悬浮系统示意图Fig.1 Schematic diagram of suspension system for maglev vehicles
电磁铁与车辆上的悬浮架连通,通过输入的励磁电流或电压与轨道产生电磁感应,为车辆提供向上的悬浮力,从而使车辆与轨道之间保持一定的悬浮间隙。当悬浮间隙变大时,电磁铁所提供的电磁力减小;当电磁力不足以支撑车辆重力时,将发生失稳现象。因此,悬浮系统是开环非自稳系统,需要由悬浮控制器构成闭环控制回路加以调节,只有电磁力与重力的动态平衡才能够维持磁浮车辆的稳定悬浮。
悬浮控制器通过传感器反馈的间隙、电磁铁电流、垂向加速度等信号对车辆和轨道之间的间隙进行实时动态调节,使其围绕在期望间隙值附近,实现磁浮车辆稳定悬浮。单点悬浮系统控制回路示意图如图2所示,中低速磁浮车辆悬浮系统的典型配置结构如图3所示。
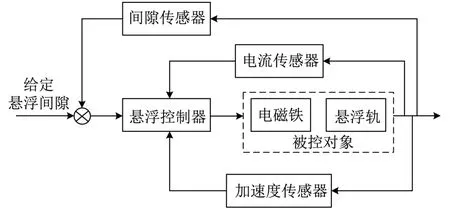
图2 单点悬浮系统控制回路示意图Fig.2 Schematic diagram of control loop for singlepoint suspension system
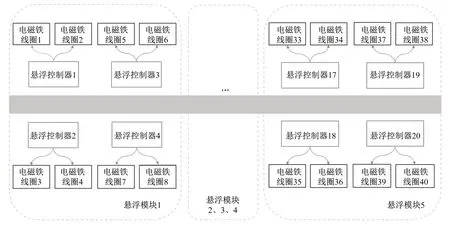
图3 中低速磁浮车辆悬浮系统典型配置结构Fig.3 Typical configuration structure of suspension system for medium-low speed maglev vehicles
2 经典性能评估指标
2.1 行列式指标
协方差矩阵作为多元随机变量的关系度量之一,其对角线元素为每个随机变量的方差,非对角线元素为2个变量的协方差,表征变量之间的相关性。文献[7]提出一种行列式指标,以监控数据与基准数据的协方差矩阵的行列式比值作为指标来评估多变量控制回路性能。
基准数据阶段指一段控制性能良好的历史阶段,记为阶段Ⅰ,将监控数据阶段记为阶段Ⅱ。记Cov(yⅠ)和Cov(yⅡ)为基准数据阶段和监控数据阶段的协方差矩阵。针对n元随机变量,可得到n×n维协方差矩阵,分别对其进行特征值分解,可得
式中:Q和U是n×n维的正交矩阵,分别包含矩阵Cov(yⅠ)和 Cov(yⅡ)的特征向量;ΛⅠ=(λ1,Ⅰ,λ2,Ⅰ,…,λn,Ⅰ)T和ΛⅡ=(λ1,Ⅱ,λ2,Ⅱ,…,λn,Ⅱ)T均为对角阵,其对角线元素为相应的特征值。行列式指标IV[10]如下所示:
式中:|·|表示行列式算子。从几何意义上讲,在假设随机变量服从正态分布的前提下,协方差矩阵可对应于数据空间中的超椭球体,其行列式的值表征超椭球体体积的大小。理想情况下,控制回路工作过程中各变量的稳态值为常数,在数据空间中对应n维空间中的一个点。实际工况中存在扰动,变量值存在波动,因此n维空间中的点扩散为超椭球体,随着超椭球体体积的增大,控制回路的性能逐步降低。
2.2 相似度指标
文献[8]针对行列式指标的局限性,利用Karhunen-Loeve(KL)变换设计了基于协方差矩阵的相似度指标ID,通过不同协方差矩阵所对应的超椭球体之间的相似度来表示系统性能是否发生了变化,计算式如下所示:
式中:λi,I和λi,II分别为基准数据阶段和监控数据阶段经过KL变换的协方差矩阵所对应的特征根,具有如下性质:

式中:vi,Ⅰ和vi,Ⅱ分别为相应的特征向量。式(4)表明2个阶段KL转换后的协方差矩阵具有相同的特征向量,若两者的特征值也相近,即λi,Ⅰ和λi,Ⅱ的值都在0.5附近,则监控数据阶段的数据空间分布与基准数据阶段的数据空间分布相似,意味着监控数据阶段接近基准数据阶段的性能;若特征值的取值接近0或1,则意味着实际控制性能与基准性能相比发生了显著变化。
2.3 欧式距离指标
对控制系统进行基于距离指标的性能评估实质为对系统变量所构成的多维空间中数据分布进行度量。系统性能良好时表现为一个包裹理想中心点的紧实体,随着性能下降,数据点偏离中心点的距离增大,呈现出数据分散的状态。
欧式距离指标是通过计算数据空间中每个数据点到中心点的距离加权平均值来比较不同控制阶段的性能变化差异,定义如下所示:

式中:IW为欧式距离指标;dⅠ和dⅡ分别为基准数据阶段和监控数据阶段数据空间的平均欧式距离。平均欧式距离d的计算式如下所示:

式中:l为监控数据阶段样本点个数;xij为第i个变量第j个样本点的取值;xi0为第i个变量的理想值。
3 云理论
3.1 基本概念
设U是用精确数值表示的定量论域,C是与U相关联的定性概念,如果定量值x∈U,且x是定性概念C的一次随机实现,则x对C的隶属度μ(x)∈[0,1]是具有一定规律的模糊数或随机数,表达式如下所示:

那么,x在U上的分布称为云,记为C(x)。x与隶属度μ(x)的组合称为云滴,记为drop(x,μ(x))。
云滴构成云,云滴是定性概念在数量上的实现。云滴的数量越大,定性概念的整体特征就越能够得到体现。云的数字特征可以反映概念的整体特征,常用期望Ex、熵En和超熵He这3个变量来表征,如图4所示。
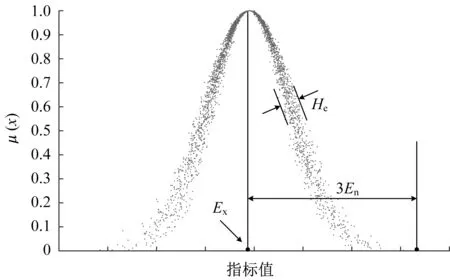
图4 云模型及其数字特征Fig.4 Cloud model and its digital characteristics
云模型通过3个基本数字特征把概念的模糊性和隶属度的随机性完整地表现出来,实现了定性与定量的转变,因此也记为C(Ex,En,He)。
(1)期望Ex表示云滴在论域空间分布的期望,它是论域空间的中心值,是最能够代表定性概念的点,即概念量化最典型的样本。
(2)熵En表示定性概念的模糊性和随机性,可以反映此定性概念云滴的离散程度,以及在论域空间中可被定性概念接受的云滴的取值范围。
(3)超熵He表示熵的不确定性度量,取决于熵的模糊性和随机性。
3.2 云模型
模糊集合理论研究的是被控对象的模糊性,概率理论研究的是被控对象的随机性,云模型重点考虑由模糊性和随机性的关联性建立起来的定性转换模型。从中心极限理论角度,如果决定某一随机变量结果的是大量微小的、独立的随机因素之和,并且每一因素的单独作用相对均匀的小,没有一种因素可起到压倒性的主导作用,那么这个随机变量一般近似于正态分布[28]。
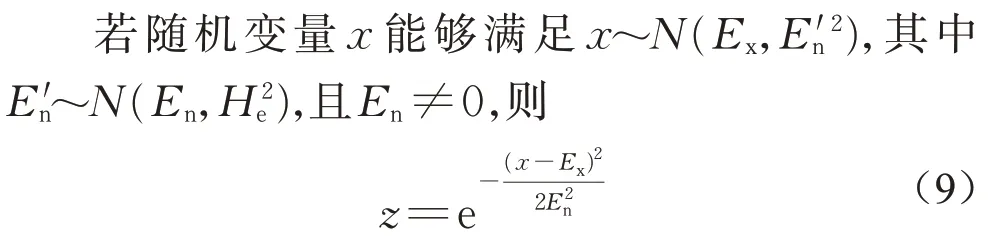
正态云的普遍适用性是建立在钟形隶属函数和正态分布的普遍适应性基础上的,是最重要的一种云模型[13]。设U是一个定量论域,用精确数值表示,C是U上的定性概念,定量值x∈U,同时x是定性概念C的随机实现。如果x~N(Ex,En′2),其 中En′~N(En,He2),同时x对C的隶属度满足下式:

那么,x在U上的分布称为正态云。
根据正态云的“3En规则”,位于区间[Ex-0.67En,Ex+0.67En]的那些元素,占全部定量值的22.33%,它们对定性概念的贡献占总贡献的50%,这部分元素称为“骨干元素”;位于区间[Ex-En,Ex+En]的那些元素,占全部元素的33.33%,它们对定性概念的贡献占总贡献的68.26%,这部分元素称为“基本元素”;位于区间[Ex-2En,Ex-En]和[Ex+En,Ex+2En]的那些元素,占全部元素的33.33%,它们对定性概念的贡献占总贡献的27.18%,这部分元素称为“外围元素”;位于区间[Ex-3En,Ex-2En]和[Ex+3En,Ex+2En]的那些元素,占全部元素 的33.33%,它们对定性概念的贡献占总贡献的4.56%,这部分元素称为“弱外围元素”。
由正态云的数字特征产生云滴,即实现从定性到定量的转换,称为正向云发生器。与正向云生成算法相反,给定一组云滴作为标本(xi,μi),产生定性概念的3个数字特征值(Ex,En,He),实现的是从定量到定性的转换,称为逆向云发生器。逆向云发生器算法是一种统计方法,得到的数字特征值是一种估计值。
3.3 云模型的相似度
目前,常用的相似度度量方法主要有云滴对比法、夹角余弦法、期望曲线法和最大边界曲线法等[12]。云滴对比法需要对云滴进行选取、排序、组合及逐个对比,当云滴数较多时,计算量非常大。夹角余弦法将数字特征作为向量,然后利用夹角余弦来得到云模型的相似度,当云模型的期望Ex远大于熵En和超熵He时,易忽略En和He2个数字特征的作用。期望曲线法和最大边界曲线法利用不同云的相交面积进行相似度计算,由于考虑了En和He的作用,因此在精度和计算时间上比前2种方法更有优势。对于正态云,基于期望曲线(ECM)来计算相应面积度量云之间的相似性,算法效果好,因此选取期望曲线法进行综合指标云和评价云的相似度度量。
称为U上正态云C(Ex,En,He)的期望曲线。由于所有的云滴都随机地围绕在正态云期望曲线这条“骨架”附近,期望曲线很好地反映了正态云的总体特征,因此可以通过求解2个云模型的期望曲线相交重叠部分的面积来表示2个云模型的相似程度。
假设2个正态云C1(Ex1,En1,He1)、C2(Ex2,En2,He2)的期望曲线为
若 两 曲 线 相 交,且 交 点 为x1,0、x2,0,则z1(x1,0)=z2(x2,0),那么可以计算得到

不妨设Ex1≤Ex2,则这2个云模型的期望曲线的空间关系有以下3种:
(1)若x1,0、x2,0同时落在区间[Ex2-3En2,Ex1+3En1]外,则2个交点之间的云滴可以忽略,即相交面积S=0。
(2)若x1,0、x2,0有一个点落在区间[Ex2-3En2,Ex1+3En1]中,则相交面积S由两部分组成,即S=s1+s2。
(3)若x1,0、x2,0同时落在区间[Ex2-3En2,Ex1+3En1]中,则相交面积S由3部分组成,即S=s1+s2+s3。s1、s2、s3的计算式如下所示:
式中:f(x)为正态分布的概率密度函数;φ(x)为标准正态分布的概率密度函数。
在相交面积S的基础上,最终可以得到基于期望曲线的云模型相似度,表达式如下所示:

基于正态云期望曲线的相似性计算方法考虑了云模型的前2个数字特征,从云模型的期望位置和跨度2个方面来比较不同正态云的相似性。
3.4 基于云理论的控制回路性能评估
与传统的评估算法类似,基于云理论的控制回路性能评估的整体思路是:首先确立作为对照的标准,然后利用现场数据经过变换处理与标准对比,最后判断当前系统的运行状况。评估流程的主要步骤为:
步骤一建立标准云Cs(Exs,Ens,Hes)。
步骤二确定待测云Ct(Ext,Ent,Het)。
步骤三计算待测云与标准云的相似度ECM(Cs,Ct)。
步骤四根据相似度比较控制回路的性能IC=ECM(Cs,Ct)。
4 仿真与分析
为测试上述指标对电磁悬浮系统控制回路性能评估的有效性,以单点悬浮系统为研究对象,选取悬浮间隙、垂向加速度、输入电流进行数值仿真与分析。
采用磁浮列车实际运行数据,对电磁悬浮系统在整个运行过程中的性能进行评估。图5为列车在某次运行中悬浮系统1的悬浮间隙、输入电流、垂向加速度的过程数据,作为待评估数据。将此次全程运行数据以5 min为一个阶段,划分为9个阶段(0~45 min)。可以发现,列车在5~10 min发生瞬时失稳,在40~45 min发生持续失稳,其他时刻表现为不等幅度的波动。
4.1 性能评估基准
对电磁悬浮系统进行控制回路性能评估的首要任务是选取评估基准。图6为选取的基准数据阶段历史数据,包括悬浮间隙、输入电流和垂向加速度,采样间隔为0.1 s,运行时长2 400 s(40 min)。由图6可见,最后8 min的记录数据波动相对较小,因此选取该阶段数据为性能评估的基准数据。
采用逆向云发生器,还可以得到基准数据的云模型,其数字特征如表1所示。
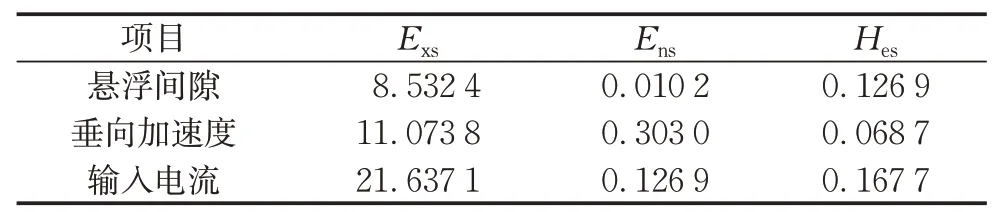
表1 悬浮系统在基准数据阶段的云模型数字特征Tab.1 Digital characteristics of cloud model for suspension system during baseline data phase
4.2 经典指标下的性能评估
基于如图6所示的基准数据,悬浮系统1在运行全过程中各指标的计算结果如表2所示。由理论分析可知,行列式指标与欧式距离指标对性能评估的规则一致,均是当指标显著小于1时,表示监控数据阶段性能比基准差,而针对相似度指标,其值趋于1时,表示监控数据性能接近基准,反之则监控数据性能与基准相比发生显著变化。由于表2中3类指标值均显著小于1,说明3类指标所表征的性能评估结果是准确的,与实际情况相符。
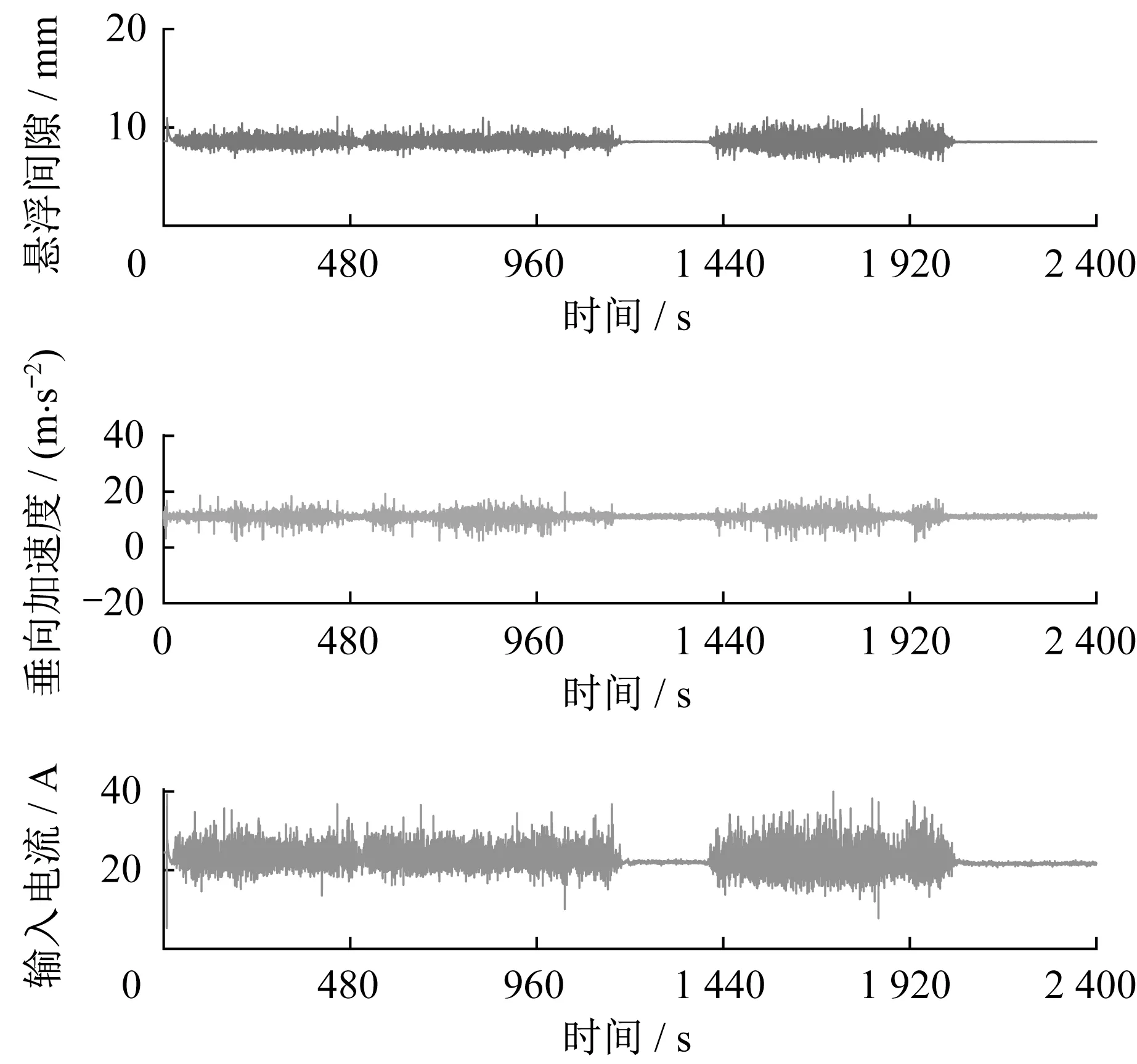
图6 悬浮系统在基准数据阶段的实测数据Fig.6 Measured data of suspension system during baseline data phase

表2 3类指标的计算结果Tab.2 Calculation results of three types of indicators
为进一步对比各指标针对电磁悬浮系统控制回路性能评估的可行性,对磁浮列车在整个运行过程中的性能进行分段评估。以如图6所示的基准数据阶段为参照,各阶段的性能评估结果如图7所示。总体来看,相似度指标ID的评估效果最差,各阶段的指标值基本在一条水平线上,无法有效区分控制回路的不同状态。行列式指标IV与欧式距离指标IW均表现为阶段5和阶段8的控制性能较优,其中阶段8的控制性能最优,与图5中阶段8的数据波动最小相对应,同时两者均反映出发生持续失稳的阶段9的控制性能最差。然而,针对发生瞬时失稳的阶段2,IV与IW表现出优越性,而指标IW在阶段2的值与邻近阶段在同一水平。
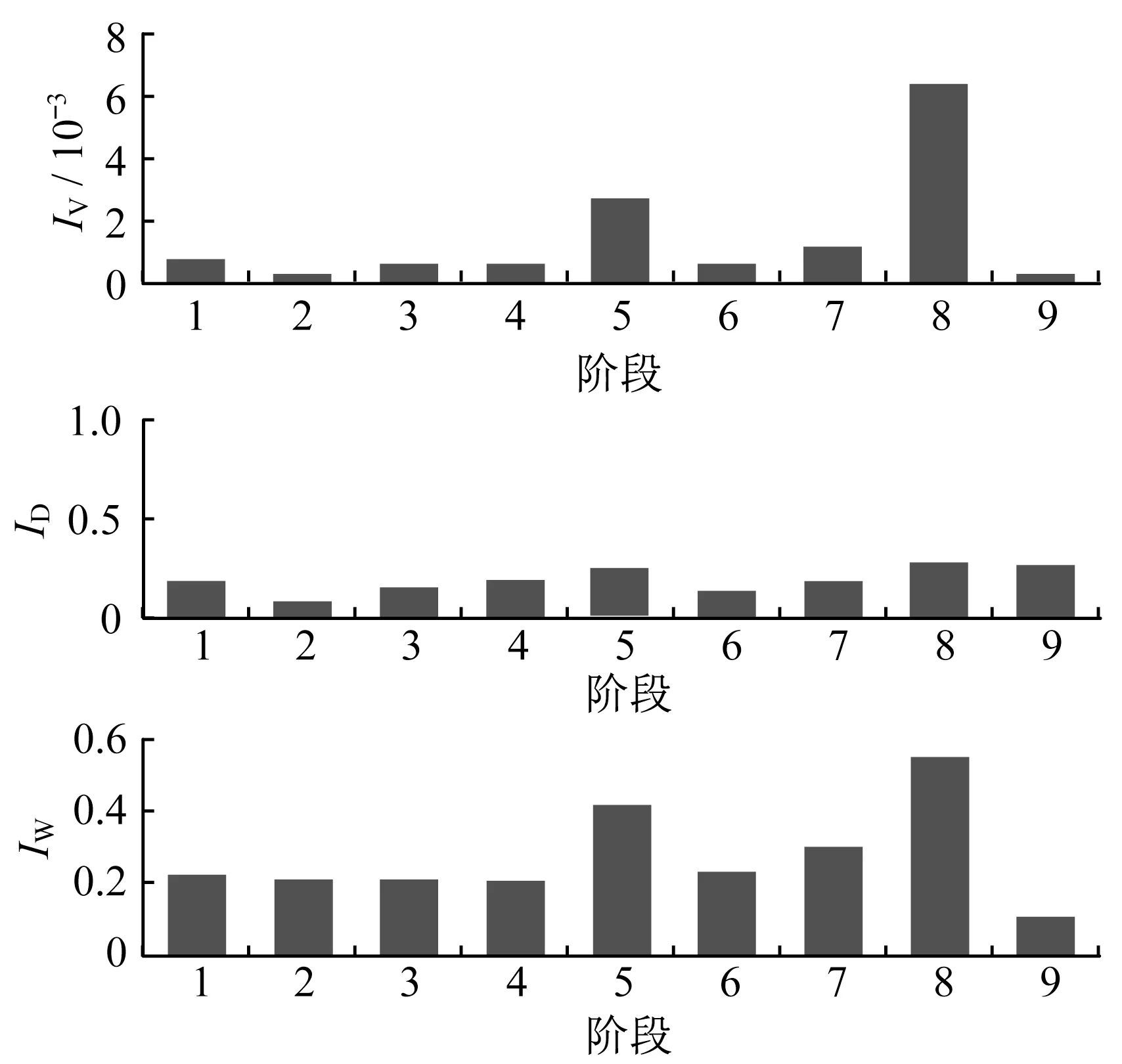
图7 悬浮系统1在不同运行阶段的经典性能评估Fig.7 Classical performance evaluation of suspension system 1 at different sections
综上,3类指标对电磁悬浮系统控制回路的性能评估效果参差不一,相似度指标ID表现最差,无法区分控制性能的好坏,行列式指标IV与欧式距离指标IW稍好,能够有效评估性能。然而,经典指标下的控制性能评估不能很好地区分回路中引起性能下降的因素,并且针对数据集99.74%之外的采样点需要额外进行数据预处理。为克服以上方法的不足,引入基于云理论的性能评估。
4.3 基于云理论的性能评估
4.3.1 单个悬浮控制回路在不同运行阶段的性能评估
基于如图5所示的运行过程数据,可得到如图8~10所示的各运行时段性能的可视化结果。为便于对比,对每个子图进行了统一坐标处理。从图8可以看出,阶段8的云模型中云滴凝聚抱合程度最高,可以认为表现最为出色,阶段9最差,阶段2次之。从图9可以看出,阶段8的云模型性能较好,阶段2最差,阶段9次之。从图10可以看出,阶段8的云模型性能最好,阶段9最差,阶段2次之。
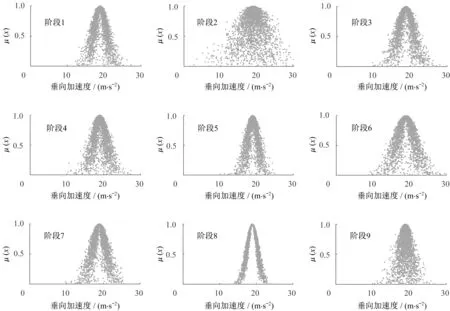
图9 悬浮系统1的垂向加速度在不同运行阶段的云模型Fig.9 Cloud model of suspension system 1 in terms of acceleration at different sections
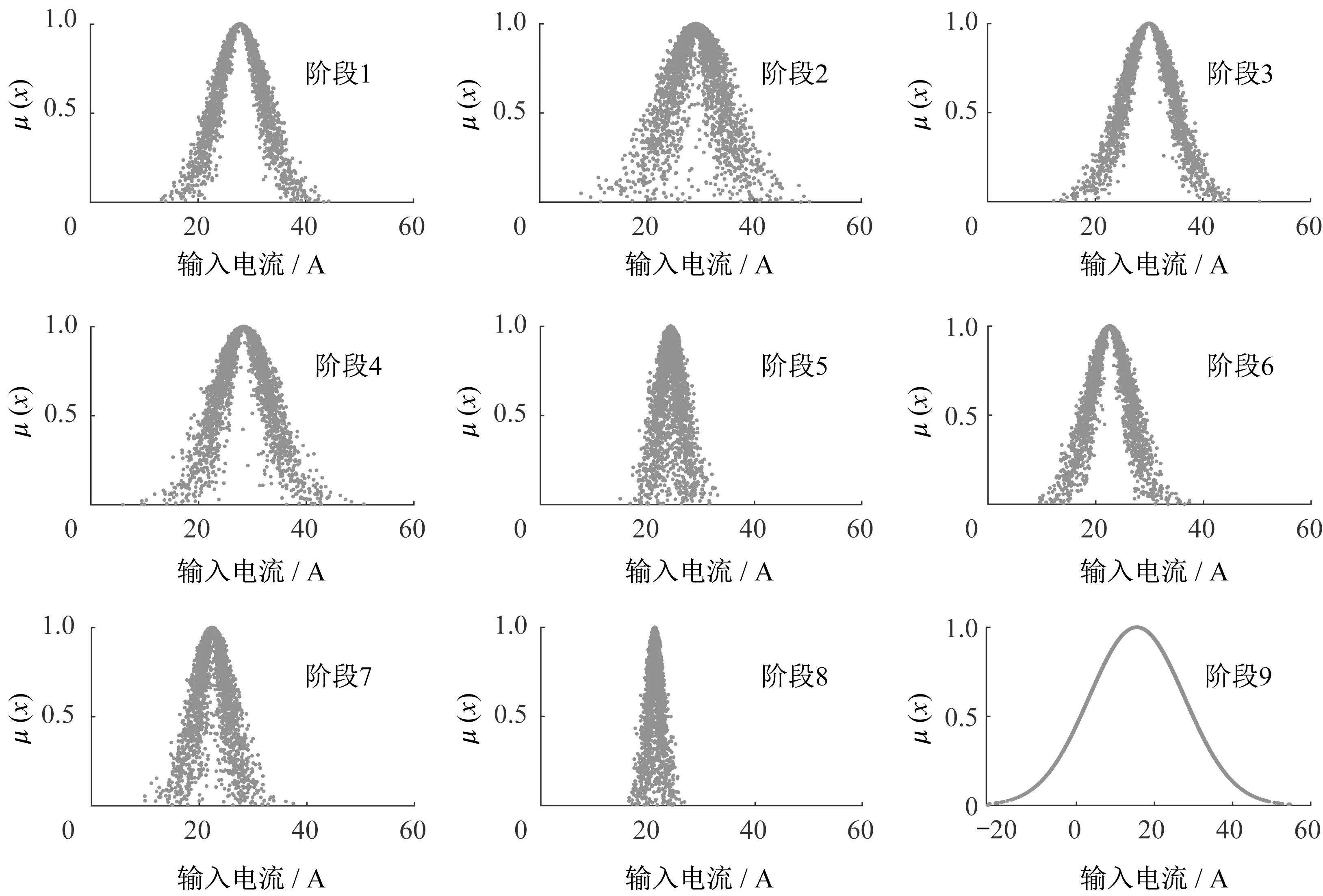
图10 悬浮系统1的输入电流在不同运行阶段的云模型Fig.10 Cloud model of suspension system 1 in terms of input current at different sections
为便于定量研究基于云理论的评估性能指标,表3~5分别列出了与图8~10相对应的云模型数字特征及与标准云模型的相似度。IC=ECM,那么IC的数值越大,则该运行阶段的系统状况越接近基准状态,也即性能越优。
综上,从图8~10和表3~5可以看出,云模型的可视化效果与基于数字特征的相似度指标高度吻合,可以从2种角度来评价悬浮系统控制回路的性能。
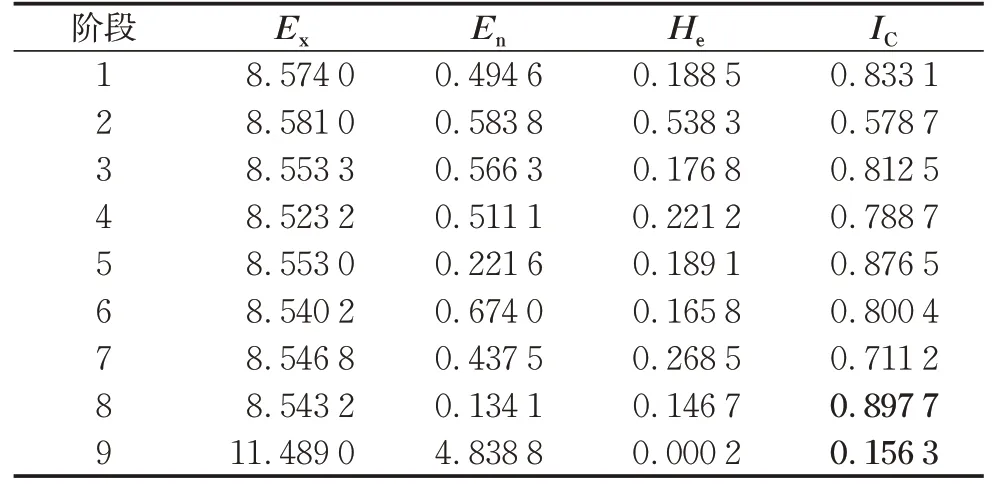
表3 悬浮系统1的悬浮间隙在不同运行阶段的云模型数字特征Tab.3 Digital characteristics of cloud model for suspension system 1 in terms of air gap at different sections
4.3.2 不同悬浮控制回路在同一运行阶段的性能评估
为比较同一运行阶段不同悬浮系统控制回路的性能,提取列车运行过程中所有悬浮系统在全程或不同运行阶段的过程数据,然后进行基于云模型的性能评估。以第1~4个悬浮控制回路的悬浮间隙为例,图11展示了悬浮间隙在同一运行阶段(阶段6)的云模型。
由图11可见,第2、4悬浮系统的云滴凝聚抱合程度较高,说明在阶段6第2、4悬浮系统控制回路相比第1、3控制回路表现出了更好的性能。
5 结语
基于数据驱动的电磁悬浮系统控制回路性能评估方法,对磁浮列车运行过程中的性能监测、评估与诊断具有重要意义。借鉴控制回路性能评估领域的经典性能评估指标以及基于云模型的相似度指标,采用实际运行数据进行了仿真。结果表明,基于云模型的相似度指标能够有效评估控制回路的性能,并且与传统评估指标相比更具有优势。此外,基于多变量系统的特点,对同一悬浮系统在不同运行阶段和不同悬浮系统在同一运行阶段分别进行了横向和纵向的性能可视化评估,便于快速锁定造成控制性能下降或提升的对象范围。
选取多变量控制系统的多个特征变量构成多维数据空间,基于多维空间数据的统计特征应用云理论对闭环系统进行了整体评估,并通过数值仿真证明了其有效性。下一步的研究工作可将多个低维云聚合成为一个多维云,从而将系统性能评估的问题转化成高维云相似度比较的问题。