基于线性自抗扰与重复控制的虚拟同步发电机并网逆变器控制策略
2022-01-14王维庆孔令清王喜泉
吕 聪,何 山,2*,王维庆,2,陈 伟,孔令清,王喜泉
(1.新疆大学电气工程学院,乌鲁木齐市 830049;2.可再生能源发电与并网控制教育部工程研究中心,乌鲁木齐市 830049)
近年来,分布式新能源发电在电力系统中的渗透率逐年提高,其中并网逆变器是实现DC-AC转换的电力电子器件,也是连接分布式电源和电网的核心设备[1-2]。电力电子器件使系统整体的惯性、阻尼降低,影响系统的稳定性[3-4]。为此,中外学者提出了虚拟同步发电机(virtual synchronous generator,VSG)的概念,通过控制并网逆变器模拟同步发电机的特性,为系统提供惯性和阻尼[5-6],进而改善分布式电源并网的电能质量并提高并网运行的鲁棒性。
文献[7]参照同步发电机的数学模型以及调压、调频特性提出电压型VSG控制,能模拟同步发电机的外特性,具有较好的控制性能;文献[8]将VSG控制与自适应下垂控制结合应用于多端柔性直流系统中,满足惯性支撑的同时调整电网间不平衡功率的分配,但未考虑故障下所提策略的适用性;文献[9]提出了在电力电子变压器网侧整流级采用VSG控制,使级联模块具有惯性、阻尼,从而获得更好的动态性能来满足直流电压平衡的需要;文献[10]提出了基于VSG的自调节虚拟阻抗控制,通过改善阻尼限制过载和故障期间的故障电流,但需要持续搜索最佳参数,计算时间长;文献[11-12]提出基于自适应虚拟转动惯量的VSG控制策略,提升了动态响应速度,但动态响应过程中会有较大的有功功率振荡;文献[13]提出一种对补偿环节可调参数调节的改进VSG控制策略,通过降低系统阶数来抑制动态响应中的功率振荡;文献[14]根据故障时VSG故障电流在d、q坐标系下的特点,设计一种电流指令方法来抑制不平衡故障下的负序电流,使VSG在故障情况下也能安全稳定运行。上述基于VSG的逆变器并网大多采用基于PI(proportional-integral)的电压电流双闭环控制,具有控制结构简单、易于实现的优点。但在强耦合、高精度控制等场合有很大的局限性,且会引起相位滞后[15-16],使VSG功率环路的带宽受到限制,导致控制性能变差,响应时间变长。此外,在电网发生扰动时也不能很好地抑制功频、电流的波动[17]。因此,研究具有高带宽、良好的抗扰能力、动态响应速度快的控制策略,对基于VSG的逆变器并网控制是非常重要的。
文献[18]提出的自抗扰控制(active disturbance rejection control,ADRC)具有动态响应快、抗干扰能力强的优点,可以很好地满足基于VSG的逆变器并网控制的要求,但其配置参数复杂,而高志强教授提出的线性自抗扰控制(linear active disturbance rejection control,LADRC)降低了参数配置的复杂度,已被广泛应用于工程实践中[19]。LADRC在满足上述基于VSG的逆变器并网控制要求的同时却牺牲了一定的跟踪精度,使用内模原理的重复控制(repeat control,RC)可有效消除输出稳态跟踪误差[20],LADRC结合RC,可以弥补LADRC牺牲的跟踪精度。基于上述分析,提出线性自抗扰控制与重复控制相结合作为电压外环控制,电流内环仍采用PI控制的新型双闭环控制策略。其中线性自抗扰控制加快系统的动态响应速度且抗干扰能力强,重复控制提高双闭环控制的跟踪精度。在MATLAB/Simulink平台下搭建仿真模型,在功率扰动和三相短路故障下验证所提控制策略的可行性和有效性。
1 VSG的基本控制策略
图1为基于VSG的逆变器并网主电路拓扑和相关控制策略示意图,将蓄电池、光伏等分布式电源等效为直流电源Udc,基于VSG的逆变器经LC滤波电路和传输线连接到电网。
基于VSG的逆变器并网数学模型为
(1)
(2)
式(1)中:t为时间;R、L、C为滤波电路中的滤波电阻、电感、电容;iLk、igk分别为iLabc、igabc的相电流,k=ab,bc,ca;Uok、UCk分别为Uoabc、UCabc的相电压,k=ab,bc,ca。
将式(1)、式(2)左乘Park矩阵可得
(3)
(4)
式中:iLf、igf分别为iLabc、igabc的d、q分量,f=d,q;Uof、UCf分别为Uoabc、UCabc的d、q分量,f=d,q;ωn为电网同步角速度。

Em为虚拟励磁电动势的幅值;θ为电角度;Pe、Qe分别为VSG的并网有功、无功功率;VT1~VT6为6个功率开关器件;Vd、Vq分别为虚拟励磁电动势的d、q轴分量;UVd、UVq分别为虚拟阻抗上压降的d轴、q轴分量;UCd、UCq分别为电容电压的d、q轴分量;Udref、Uqref分别为VSG输出的虚拟励磁电动势与虚拟阻抗上压降的差值的d、q轴分量;iLd、iLq分别为电感电流的d、q轴分量;分别为外环d轴、q轴电流实际值;Labc、Cabc、Rabc分别为滤波电路中的三相滤波电感、电容、电阻;SVPWM(space vector pulse width modulation)为空间电压矢量;SOGI(second-order general integrator)为二阶广义积分器图1 VSG并网示意图Fig.1 Sketch map of a grid-connected VSG
先对式(4)求导,再将式(3)代入其中,得
(5)
VSG的有功-频率控制方程为
(6)
式(6)中:J为虚拟转动惯量;D为虚拟阻尼系数;Pref、Pe分别为VSG有功功率参考值、并网有功功率;ω为虚拟转子角速度;θ为电角度。
有功功率控制框图如图2所示。

图2 有功频率控制框图Fig.2 The control block diagram of frequency
无功-电压控制方程为
(7)
式(7)中:Em为虚拟励磁电动势的幅值;Ugm、UCm分别为并网电压的幅值、电容电压的幅值;K0为无功-电压控制下垂系数;Qref、Qe分别为VSG无功功率参考值、并网无功功率;K1为比例系数。

1/s为积分图3 无功电压控制框图Fig.3 Control block diagram of reactive power
无功电压控制框图如图3所示。由于微电网线路呈阻性,而将VSG输出的虚拟励磁电动势Vabc与虚拟阻抗上压降Uvabc的差值作为电压电流双闭环中电压外环的参考值,能使系统呈一定感性,提高基于VSG的逆变器并网运行的鲁棒性,其控制框图如图4所示。

Ls为虚拟电感;Rs为虚拟电阻图4 引入虚拟阻抗控制框图Fig.4 Control block diagram of virtual impedance
可见,求解虚拟阻抗中电抗的压降需要对电网电流求导,且此微分环节将使得系统动态响应时间变长。由此引入基于广义二阶积分器(second-order general integrator,SOGI)的虚拟阻抗环节[21],在计算其压降时,能避免微分运算,加快系统的动态响应。具体实现方式为:若Iin为输入正弦量,则输出Iout1与Iout2可表示为
(8)
式中:B为一常数。
由式(8)得
(9)
则虚拟电感Ls上的压降为
(10)
同理可得虚拟电阻Rs上的压降为
UR=RsIin=RsIout1
(11)
虚拟阻抗上的压降Uv为
Uv=UR+UL
(12)
由式(8)~式(12)得基于SOGI的虚拟阻抗框图(图5)。
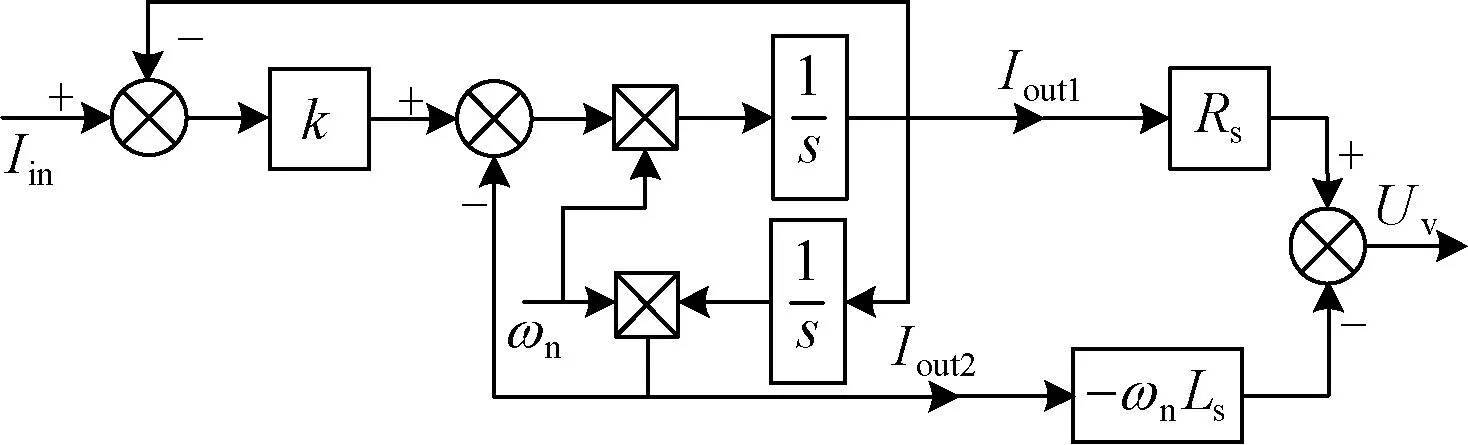
图5 基于SOGI的虚拟阻抗框图Fig.5 Block diagram of virtual impedance based on SOGI
引入基于SOGI虚拟阻抗的电压外环控制方程为
(13)
电流内环控制方程为
(14)
式中:Udref、Uqref分别为VSG输出的虚拟励磁电动势与虚拟阻抗上压降差值的d、q轴分量;UCd、UCq、ILd、ILq分别为电容电压、电感电流的d、q轴分量;Kp1、Ki1为电压外环PI控制参数;Kp2、Ki2为电流内环PI控制参数。
2 二阶LADRC+RC电压外环设计
由式(5)可知,基于VSG的逆变器并网系统是多变量、强耦合的,在精度要求较高的情况下,基于PI的电压电流双闭环控制已不再适用于并网,需设计新型双闭环控制策略来控制基于VSG的逆变器并网。LADRC根据跟踪误差调整其增益,从而与PI控制相比,加快系统的动态响应,通过补偿系统的不确定性和非线性,抑制系统的稳态扰动。然而作为一个线性控制器,采用LADRC的电压外环控制并不能显著提高跟踪精度,为提高其电压外环控制的跟踪精度,可在其中结合RC。由此提出一种采用LADRC+RC的电压外环控制,电流内环仍采用传统PI控制的新型双闭环控制策略。
2.1 二阶LADRC设计
LADRC由线性扩展状态观测器(linear extended state observer,LESO)和线性状态误差反馈律(linear state error feedback,LSEF)组成,其控制框图如图6所示。其中LESO的作用是估计总扰动;LSEF的功能类似线性PD控制器,获得所需信号;且LADRC的自抗扰效果主要取决于LESO对总扰动的估计精度。
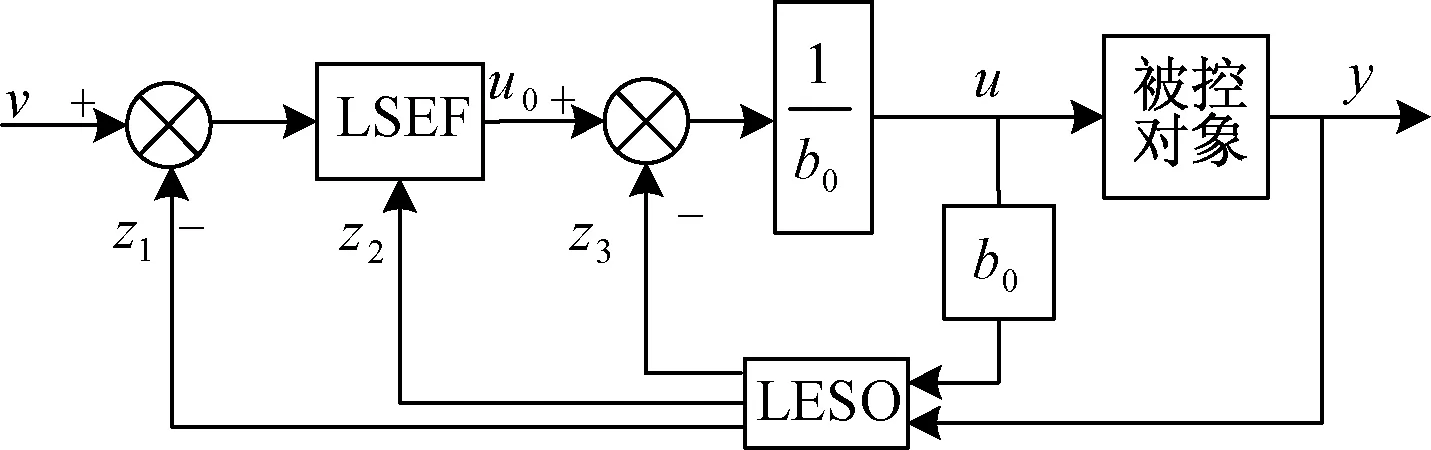
v为系统的输入;z1、z2、z3分别为对状态变量xi(t)的估计值,i=1、2、3;u0、u分别为LESF的输出、LADRC的输出;y为系统的输出图6 二阶LADRC控制框图Fig.6 Control block diagram of second-order LADRC
式(5)为时域二阶数学模型,因此需设计LADRC控制器的阶数为2,且式(5)中d、q轴形式相同,则LADRC控制结构也一致,所以可将d、q轴微分方程表示为一个通用的状态空间模型。
(15)


(16)
LESO为
(17)
式(17)中:zi(t)为对xi(t)的估计值,i=1,2,3;βi为观测器增益,决定了zi(t)对xi(t)估计精度;e(t)为状态变量xi(t)与估计值zi(t)的误差。
LSEF为
(18)
式(18)中:v(t)为LADRC的控制输入,v(t)=Ud,qref;kp、kd为LSEF的控制参数;观测器增益βi以及kp、kd可以通过带宽参数化方法得到,可表示为[19]
(19)
式(19)中:ω0为观测器带宽;ωc为控制器带宽。
2.2 RC设计
RC主要包括重复控制内模、周期延迟环节及补偿器,其控制框图如图7所示。在RC的作用下,累积周期内的误差,经补偿器后使RC能控制下一周期的输出量,从而减少总体误差。
RC的内部模型M可表示为
(20)
C(z)=krS(z)
(21)
式(21)中:kr为重复控制器增益,取kr=0.9;S(z)为二阶滤波器,主要作用是消除高次谐波。
S(s)为S(z)的拉普拉斯变换方程,可表示为
(22)
式(22)中:s为拉普拉斯变换中的微分算子;ω1为S(s)的截止频率,与VSG并网逆变器的截止频率相同;ξ为阻尼比,取ξ=0.707。

Q(z)Z-N为重复控制的改进内模;Q(z)起保持系统稳定的作用,一般为低通滤波环节或小于1的常数,取Q(z)=0.95;Z-N为周期性的延迟环节,其中N为基波周期内的采样次数,N等于采样频率与电网频率的比值;C(z)为补偿器,用于提供幅值补偿和相位补偿图7 RC控制框图Fig.7 The control block diagram of RC
将式(22)进行双线性变换,可得离散后的传递函数S(z)为
(23)
2.3 LADRC+RC复合控制策略
LADRC+RC电压外环控制、电流内环PI控制框图如图8所示。当系统稳定运行时,在LADRC+RC电压外环中,电压参考值与电容电压值的d、q轴分量分别做差,经LADRC+RC电压外环控制得到电流内环的参考值;在电流内环中,电流参考值与电感电流值的d、q轴分量分别做差,经PI控制后得到电压控制量。
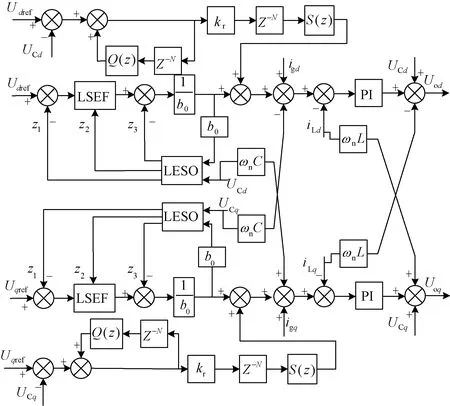
图8 LADRC+RC复合控制框图Fig.8 The composite control block diagram of LADRC and RC
此复合控制策略结合了LADRC与RC的优点,能同时获得更快的动态响应速度和更高的跟踪精度。图8中外环控制仍主要基于LADRC,保证并网的动态响应速度,且新增的RC减小了参考值与实际值之间的稳态误差,从而提高了跟踪精度。由于LADRC的等效带宽比RC大,因此可在不损害双闭环控制性能的情况下结合这两种控制策略。
3 仿真分析
在MATLAB/Simulink环境下,按照图1搭建基于VSG的逆变器并网系统模型,对比基于LADRC+RC的电压外环与电流内环PI控制策略(以下简称LADRC+RC双闭环控制策略)、基于LADRC的电压外环与电流内环PI控制策略(以下简称LADRC双闭环控制策略)和电压电流双闭环PI控制策略(以下简称PI双闭环控制策略)3种控制策略的性能,验证所提LADRC+RC双闭环控制策略的有效性及优越性。仿真模型的关键参数如表1所示。

表1 VSG仿真关键参数Table 1 Key parameters of VSG simulation
3.1 功率扰动下基于VSG的逆变器并网仿真分析
为验证所提LADRC+RC双闭环控制策略在功率扰动下的控制性能,设置0.6 s后VSG给定参考功率发生扰动,由10 kW跃变为15 kW,仿真结果如图9~图11所示。

图9 3种控制策略下功率扰动时的电网电流波形Fig.9 Current waveform during power disturbance under three control strategies
为更加直观地对比PI、LADRC、LADRC+RC这3种双闭环控制策略在功率扰动下的控制性能,对图10、图11中仿真结果进行量化,结果如表2、表3所示。
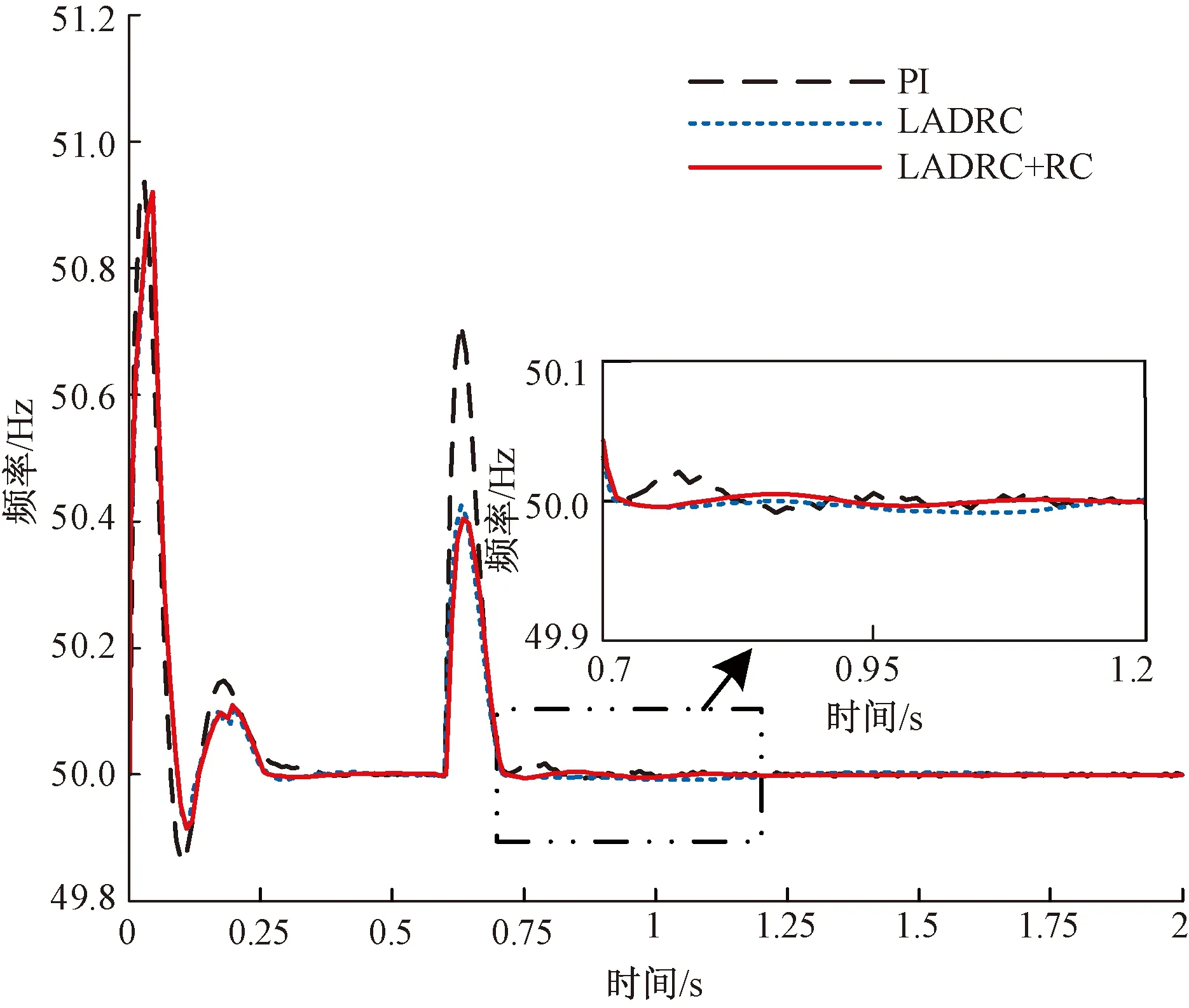
图10 3种控制策略下功率扰动时的频率比较Fig.10 Comparison of frequency during power disturbance under three control strategies
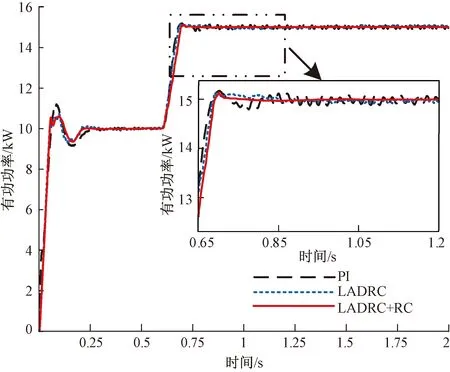
图11 3种控制策略下功率扰动时的有功功率比较Fig.11 Comparison of active power during power disturbance under three control strategies
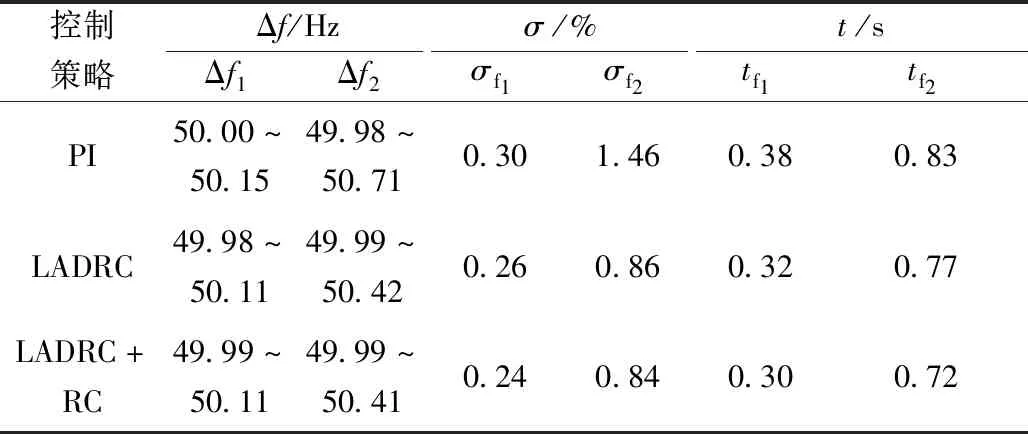
表2 功率扰动下频率波动及响应时间指标Table 2 Frequency fluctuation and response time index under power disturbance
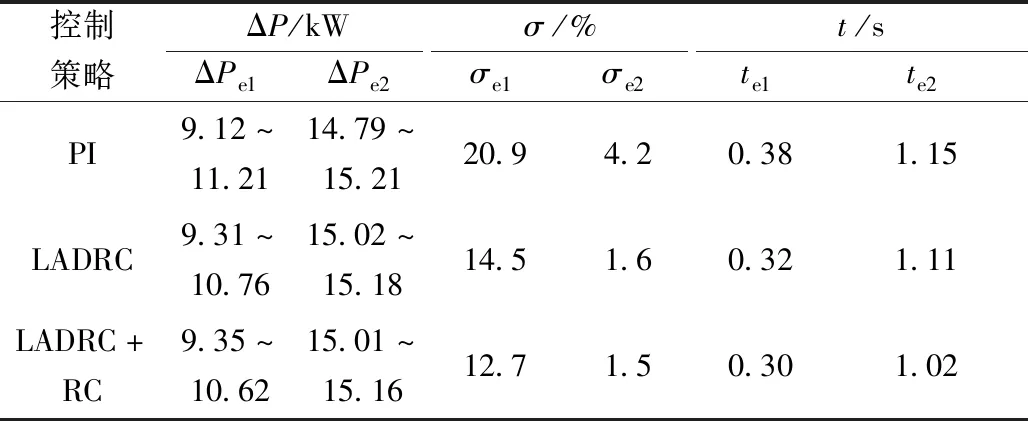
表3 功率扰动下有功功率波动及响应时间指标Table 3 Active power fluctuation and response time index under power disturbance
由图10、图11和表2、表3可知,基于VSG的逆变器并网启动时会有一定的冲击,经短暂波动后,采用LADRC+RC、LADRC双闭环控制策略分别在0.30、0.32 s时达到稳态,而PI双闭环控制策略在0.38 s时才达到稳态;与PI双闭环控制策略相比,LADRC+RC、LADRC双闭环控制策略的频率、有功功率波动误差指标σ都较小,抗干扰能力强。
如图9所示,LADRC+RC、LADRC双闭环控制策略的动态响应时间明显少于PI双闭环控制策略,电网电流在0.6 s功率增加后能快速进入新的稳态。由图10、图11、表2、表3可知,在0.6 s功率增加后LADRC+RC、LADRC双闭环控制策略的抗干扰能力强,能很好地抑制频率、有功功率波动,明显优于PI双闭环控制策略;且LADRC+RC双闭环控制策略的动态响应速度最快,仅在0.72 s就可达到稳态,比PI双闭环控制策略快0.11 s。在恢复稳定运行后,PI双闭环控制下的频率、有功功率在基准值上有微小波动,LADRC双闭环控制策略能抑制此微小波动,但略微偏离基准值,而LADRC+RC双闭环控制策略的跟踪精度高,能在抑制波动的同时使频率、有功功率紧跟基准值。
3.2 三相短路故障下基于VSG的逆变器并网仿真分析
为验证所提LADRC+RC双闭环控制策略在三相短路故障下的控制性能,设置0.8 s时基于VSG的逆变器并网线路发生三相短路故障,三相电压跌落至0.8 p.u.,1.2 s时故障切除,得到仿真结果如图12~图15所示。

图12 三相短路故障时电网电压输出波形Fig.12 Grid voltage output waveform when three-phase short-circuit fault occurs
为更加直观地对比PI、LADRC、LADRC+RC三种双闭环控制策略在电网三相短路故障时的控制性能,对图14、图15中仿真结果进行量化,分别如表4、表5所示。其中,Δf′、ΔP′分别为三相短路故障下频率、有功功率的波动范围,σ′为波动的误差量,t′为三相短路故障下的动态响应时间,Δf′1、ΔP′e1分别为基于VSG的逆变器刚并网时频率、有功功率的波动范围,σ′f1、σ′e1分别为对应的波动误差量,t′f1、t′e1分别为对应的动态响应时间,Δf′2、ΔP′e2分别为三相短路故障发生时频率、有功功率的波动范围,σ′f2、σ′e2分别为对应的波动误差量,t′f2、t′e2分别为对应的动态响应时间。Δf′3、ΔP′e3分别为三相短路故障切除时频率、有功功率的波动范围,σ′f3、σ′e3分别为对应的波动误差量,t′f3、t′e3分别为对应的动态响应时间。
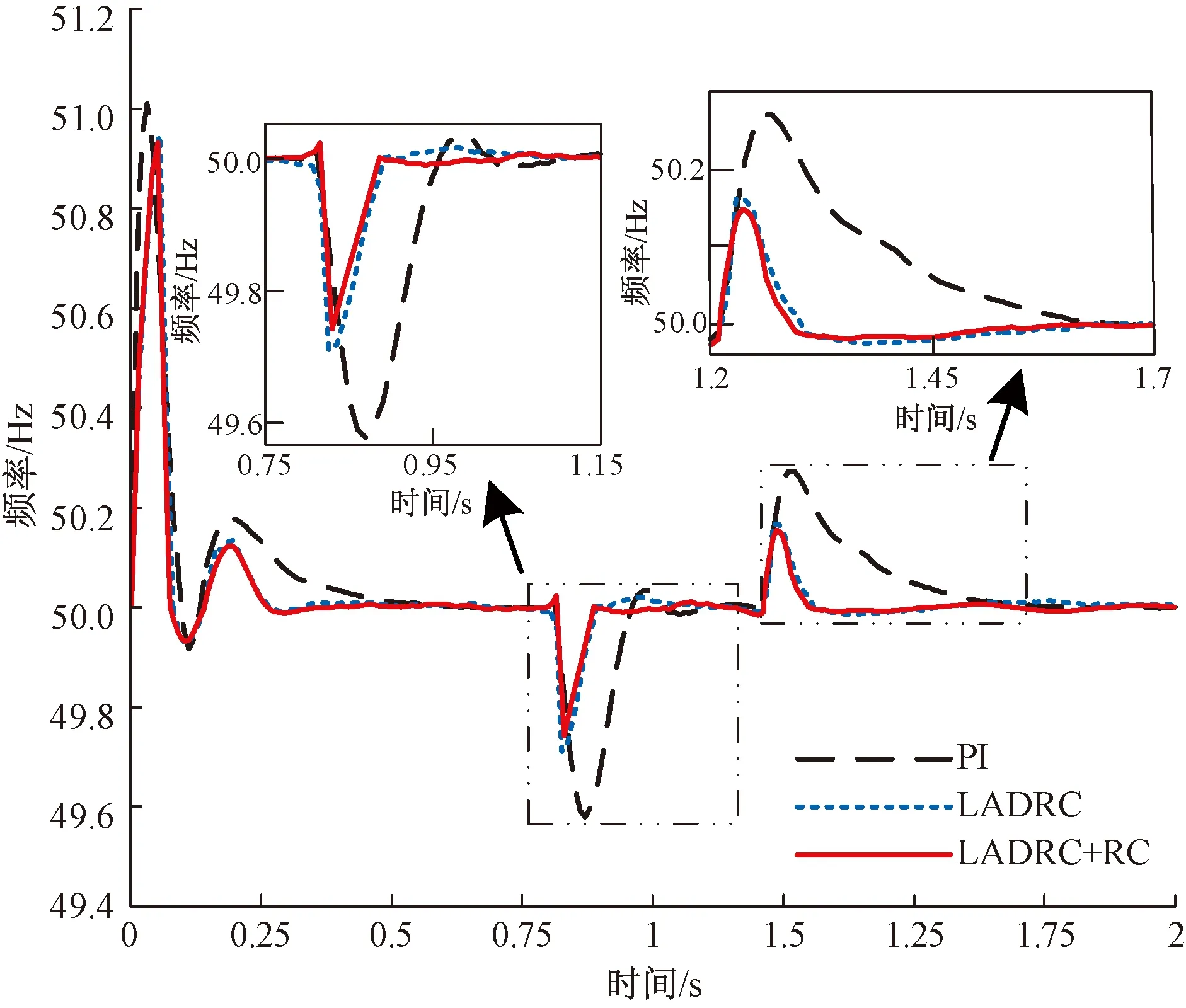
图14 3种控制策略下三相短路故障时的频率比较Fig.14 Comparison of frequency when three-phase short-circuit fault occurs under three control strategies
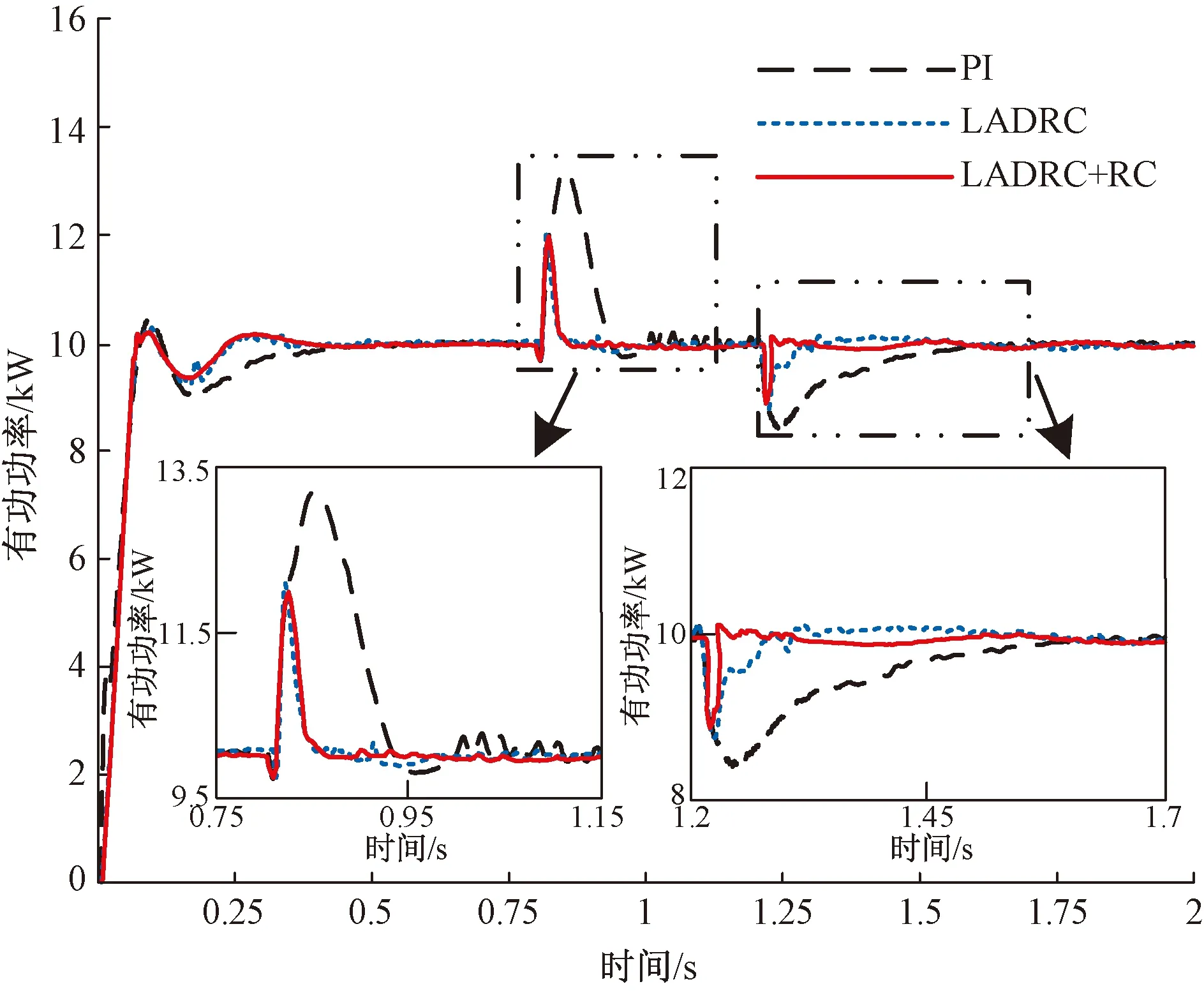
图15 3种控制策略下三相短路故障时的有功功率比较Fig.15 Comparison of active power during three-phase short-circuit fault under three control strategies

表4 三相短路故障时频率波动及响应时间指标Table 4 Frequency fluctuation and response time index when three-phase balance fault occurs

表5 三相短路故障时有功功率波动及响应时间指标Table 5 Active power fluctuation and response time index when three-phase balance fault occurs
如图13所示,在0.8 s发生故障时LADRC+RC、LADRC双闭环控制下的冲击电流都要远小于PI双闭环控制,且在故障发生时和故障切除后动态响应时间明显少于PI双闭环控制策略,电网电流均能快速进入新的稳态。由图14、图15和表4、表5可知,在0.8 s故障发生时LADRC+RC、LADRC双闭环控制策略的频率、有功功率波动误差小,抗干扰能力强,明显优于PI双闭环控制策略;且LADRC+RC双闭环控制策略的动态响应速度最快,仅在0.88 s就达到故障持续时间内的稳态,比PI双闭环控制策略快0.08 s。同理1.2 s故障切除后LADRC+RC双闭环控制策略的抗干扰能力最强、动态响应速度最快。在切除故障恢复稳定运行后,LADRC+RC双闭环控制策略能在抑制波动的同时紧跟基准值,具有较好的跟踪精度。
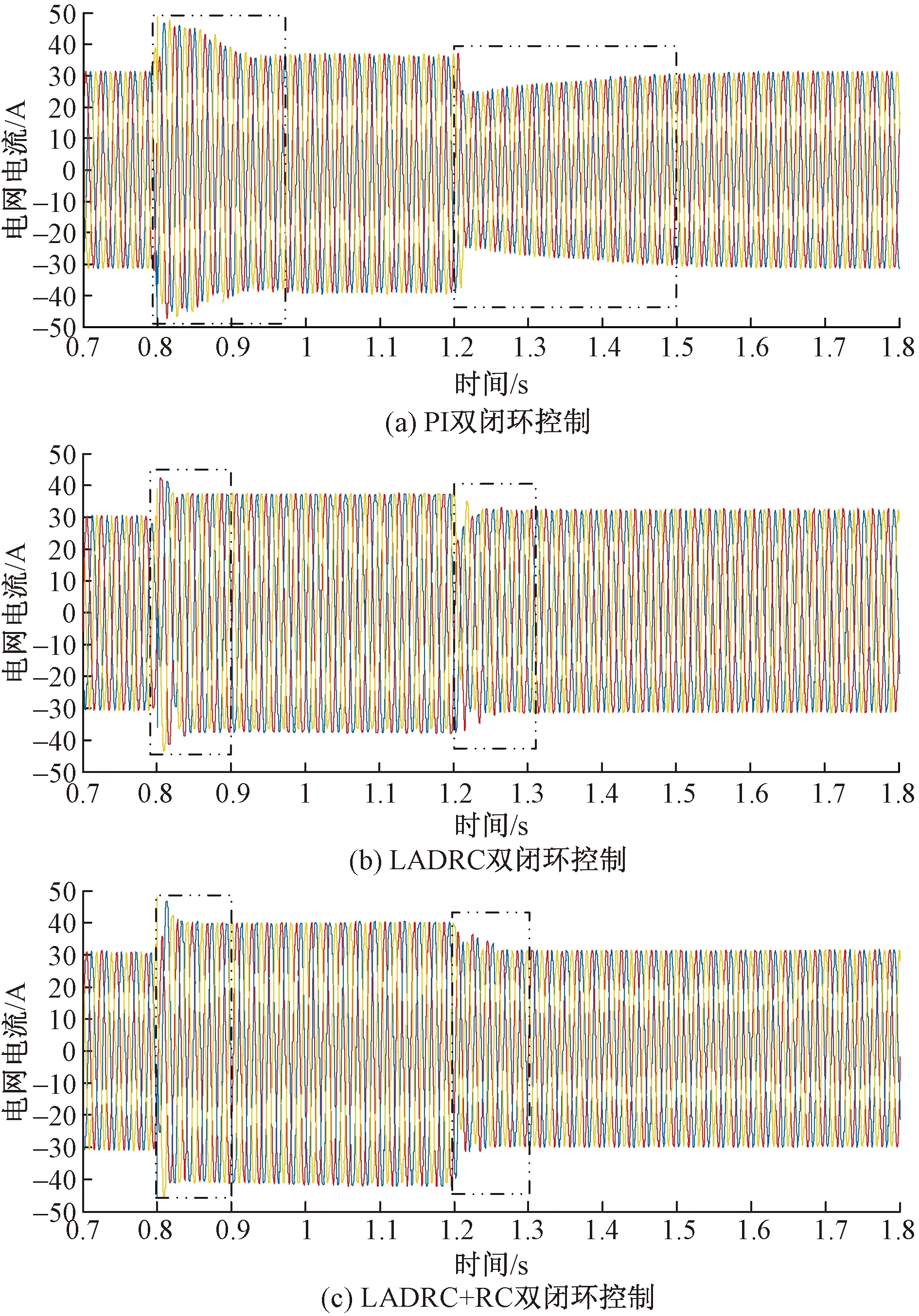
图13 3种控制策略下三相短路故障时的电网电流波形Fig.13 Grid current waveform during three-phase short-circuit fault under three control strategies
4 结论
基于VSG的逆变器并网采用电压电流双闭环PI控制策略,使系统动态响应时间长,抗干扰能力差的问题。结合线性自抗扰控制动态响应快,抗干扰能力强以及重复控制跟踪精度高的优势,提出线性自抗扰控制与重复控制相结合作为电压外环控制,电流内环仍采用PI控制的新型双闭环控制策略。功率扰动与三相短路故障下的仿真结果表明:对比电压电流双闭环PI控制策略,该策略动态响应速度加快、抗干扰能力强、跟踪精度高,从而使基于VSG的逆变器并网后能够安全可靠地运行。
