基于VRUs深度事故重建的AEB效能对头部损伤风险的影响
2022-01-13李永强许永虹王丙雨高秀晶黄红武聂冰冰
韩 勇,李永强,许永虹,王丙雨,2,高秀晶,2,黄红武,2,聂冰冰
(1. 厦门理工学院机械与汽车工程学院,厦门 361024,中国;2. 福建省客车及特种车辆研发协同创新中心,厦门 361024,中国;3. 汽车安全与节能国家重点实验室,清华大学,北京 100084,中国)
2013年至2016年间,汽车与弱势道路使用者(vulnerable road users, VRUs)碰撞事故频发,据世界卫生组织(World Health Organization,WHO)统计,每年因道路交通事故造成的伤亡人数VRUs占50%以上[1],对VRUs保护有重大作用的汽车自动紧急制动系统(automatic emergency braking, AEB)正受到广泛关注,欧盟新车评价规程(Euro-New Car Assessment Program,Euro-NCAP)、中国新车评价规程(China New Car Assessment Program, C-NCAP)也相继将AEB测试纳入规程[2-3]。
2018年的美国国家道路交通管理局(National Highway Traffic Safety Administration,NHTSA)统计结果显示:奔驰、沃尔沃、特斯拉等在售车中汽车自动紧急制动系统(AEB)安装率均超过93%[4]。学者也对AEB在降低事故发生率及伤亡率中有深入研究。Robert Anderson[5]对澳大利亚深度交通事故数据库进行事故重建并加装AEB,发现AEB可降低20%~25%致死率和25% ~ 35%伤害率。陈强等[6]对中国交通事故深入研究(China In-Depth Accident Study,CIDAS)数据库进行事故重建,采用PC-Crash加装AEB方法研究其对降低行人事故发生率的影响,发现超过20%的事故可规避。不同的传感器参数配置会影响AEB功效,导致研究其有效性比较复杂。学者们通常采用场景建模及多体方法研究AEB系统响应。比如:HUANG Sunan等[7]建立最常见的十字路口汽车与过街行人碰撞场景,发现传感器不小于60°才能有效探测到行人。刘福聚等[8]基于CIDAS数据库建立测试场景,发现AEB探测角度为40°、即碰时间 (time to collision,TTC)为1 s和制动减速度为0.9g参数下,能减少58.4%行人事故。Erik Rosén[9]通过研究AEB对行人事故的作用时,得出传感器探测角(field of view in sensor detection,FOV)为40°时,行人死亡人数减少40%,重伤人数减少27%。赵雨晴等[10]基于车载视频信息利用PC-Crash对自行车骑车人从障碍物后出现此类场景作为分析对象,研究不同探测角度下AEB对二轮车事故的规避性能。随着道路监控和行车记录仪的使用,基于视频信息的深度事故重建对AEB的研究有重要的意义。吴贺等[11]采用多体系统与有限元相结合的方法对两起具有清晰视频信息的VRUs事故案例进行重建,验证并提出了一种高精度事故重建方法。石亮亮等[12]在行人与车辆碰撞(一次碰撞)基础上,研究行人与地面碰撞(二次碰撞),发现二次碰撞中会增加行人头颈部的损伤风险。聂进等[13]通过事故重建研究了行人与自行车骑车人头部动力学响应。
据国际协调研究活动(International Harmonized Research Activities,IHRA)统计,在与车辆碰撞中,行人头部与下肢是最易受伤害的身体部位,且头部损伤是VRUs致死的主要原因[14]。AEB的介入,既会影响事故发生率,又会影响VRU碰撞中的损伤;因此在研究AEB有效性时,应综合考虑其对规避率和伤亡率的影响,可利用头部损伤风险更直观反应AEB的积极作用,使研究结果更具理论依据。
本研究在交通事故视频数据库中选取具有清晰完整视频信息、详细伤情报告的20起真实VRUs事故案例,利用Madymo和PC-Crash分别对案件进行事故重建和碰前场景还原,在此基础上为事故车辆添加AEB,研究不同FOV下以及减速度大小对其规避能力的影响,随后对在AEB介入后仍未规避的事故进行头部损伤分析,通过对比原始事故损伤参数,研究AEB对VRUs头部损伤的影响。
1 方法
1.1 事故筛选
事故数据来自于交通事故视频数据库VRUTRAVi[15],事故筛选遵循以下原则:
1) 事故案件具有清晰完整的视频信息(行车记录仪或道路监控视频);
2) 案件中除事故车辆外,至少包含一位行人(或二轮车骑车人);
3) 事故中VRUs有明显损伤,案件包含相对完整的伤者损伤报告。
本文共选取行人案件6例、自行车案件3例、电动车案件11例,共计20例VRUs事故(编号C1-C20)进行研究。事故基本信息如表1所示。其中:v为车辆碰撞速度,MAIS为头部损伤严重等级。
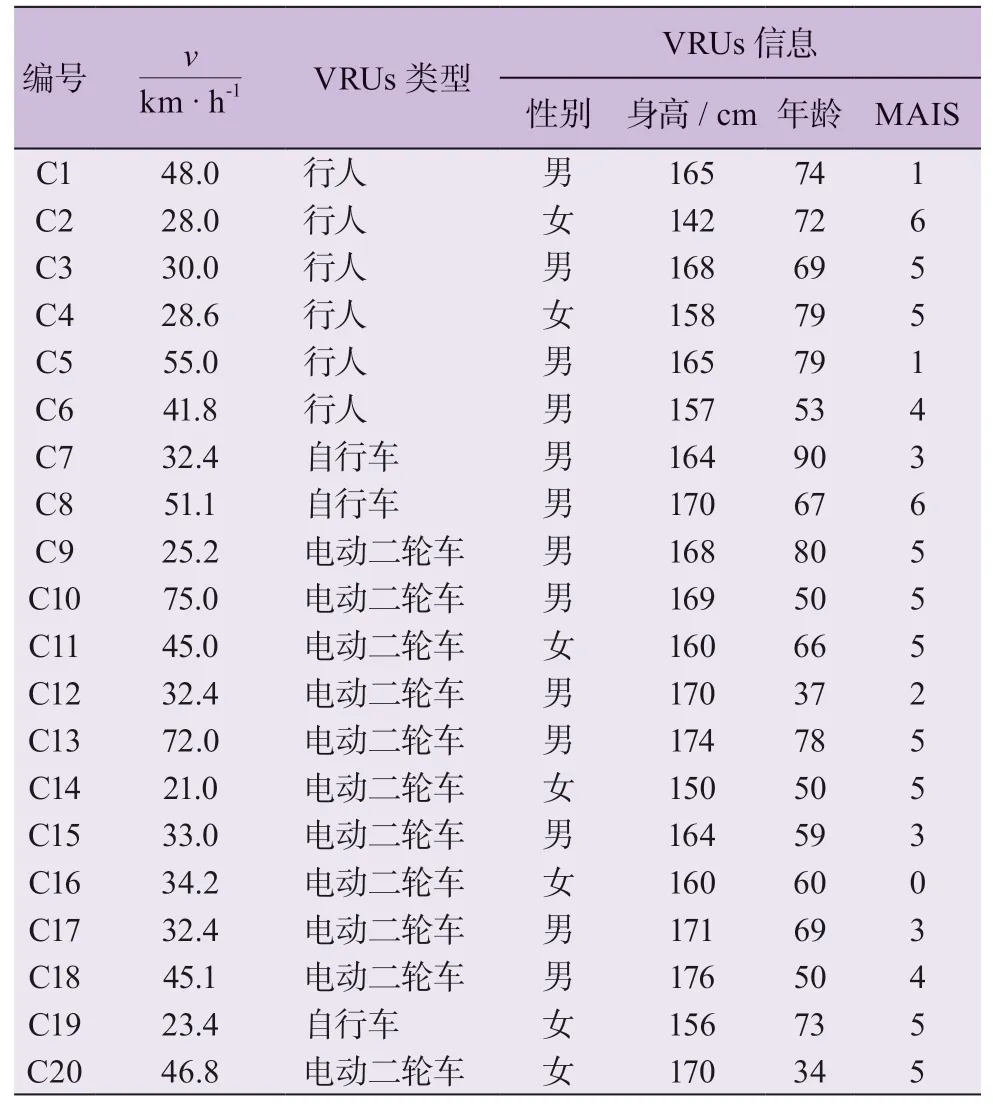
表1 事故信息
1.2 基于视频信息的深度事故重建
利用Madymo进行深度事故重建。在建模过程中,车辆几何参数、质量根据实际事故车辆信息进行搭建;车辆前部结构刚度系数依据Euro-NCAP中公布的同款或同类车型刚度分布进行具体数值设置[16];假人模型采用瑞典查尔莫斯理工大学的CPM模型[17](身高175 cm,体重78 kg)。同时根据真实案例中假人信息,调用Madymo中的Gebod模块对标准的CPM模型进行等比例缩放,并参照事故视频信息中碰撞位置调整碰撞姿态。二轮车模型的几何参数按照事故原始车辆信息进行建模,结构力学特性参照文献[18-19]。最后定义汽车与地面、行人与地面、汽车与行人等各接触面之间的摩擦系数[20]。通过视频分析法(video frame)和直接线型转换(direct linear transformation,DLT)[21],可限定汽车及VRUs的碰撞速度范围。事故重建的结果和碰撞运动学与事故视频精确对比一致后(图1为C4事故重建结果验证示例),车辆与VRUs最终位置(如图2所示)和事故现场测量的尺寸误差在10%以内[22-23],认为重建结果有效,可输出头部损伤值。
1.3 碰前事故场景重建
在PC-Crash中调用事故同款车辆或同类型车辆,行人及车辆尺寸、质量等参数,均按真实事故信息定义;路面信息按国标GB 5768.7-2018进行搭建;事故重建得到的车辆碰撞速度及VRUs速度信息作为事故碰撞前场景建模的参照速度,同时以该速度点的车辆及VRUs位置为起点,倒推碰撞前1 s(或大于1 s)时车辆和VRUs的运动轨迹。当仿真动画中车辆与VRUs发生碰撞时,二者速度与真实事故相同,碰撞位置与事故现场图一致,二者与周围参照物相对位置和事故视频一致;且当仿真动画采用与原始事故视频帧率播放时,80%以上画面可以相对应。此时认为该碰前事故场景模型有效。图3是C4案例碰前场景还原,碰前840 ms到碰撞0 ms时刻与原事故视频一一对应,即碰前场景重建有效。
1.4 基于AEB有效性分析的损伤指标选取
以往分析VRUs头部损伤,仅使用头部损伤指标(head injury criterion,HIC)[24],然而HIC这一指标只考虑了头部的线性运动,由头部旋转运动导致的头部损伤无法评估。王方等[25]提出在基于头部运动学响应中,头部碰撞能量(head impact power,HIP)能有效评价由于头部线性运动和旋转运动造成的头部损伤。此外,有学者在HIC、HIP基础上又引入了头部最大角速度、最大角加速度[11,26]。基于此,本文采用HIC、HIP、最大角速度及最大角加速度等指标综合评估VRUs的头部损伤风险。
2 AEB有效性分析
2.1 理论模型
AEB系统在纵向避撞算法中以即碰时间(time to collision,TTC)算法的性能最优[27],因此本文采用TTC模型,从当前时刻开始,两车以目前速度行驶至碰撞点所剩余的时间为式中:D为相对距离;vr为相对车速。在实际建模过程中,当车辆的TTC小于设定的阈值时,AEB便以一恒定的减速度制动。
2.2 参数设定
TTC阈值过大会造成车辆与VRUs相对距离过大,影响驾驶体验;取值过小可能无法起规避作用。Hamdane等[28]在2015年对真实交通事故重建及碰撞前事故还原发现,在碰撞前1/s,行人相对车辆的位置较分散,而在0.5~1.0 s时,行人在车辆前方会相对集中。结合目前市场上大多数AEB系统的TTC设置,在参数分析时,TTC取值1 s。综合传感器的应用场景及造价,本研究选用毫米波雷达作为AEB探测传感器,探测角度取30°、40°、50°、90°。传感器探测距离参考市面上雷达传感器厂家,本研究取60 m;考虑路面附着系统实际情况,AEB制动减速度取0.8g,做参数分析时取0.5g,以对比模拟车辆遇到雨天或行驶在湿滑路面上时AEB的制动效果。
2.3 仿真流程
图5 为研究AEB对VRUs头部损伤影响流程图。在搭建碰前场景基础上,将PC-Crash中的AEB模块添加到事故车辆中,同时去除事故车辆及VRUs的应急反应(紧急转向及紧急制动),本研究仅考虑AEB自身的作用,暂不考虑驾驶员和VRUs存在应急反应。最后按表2仿真矩阵进行不同参数设置下的仿真分析。
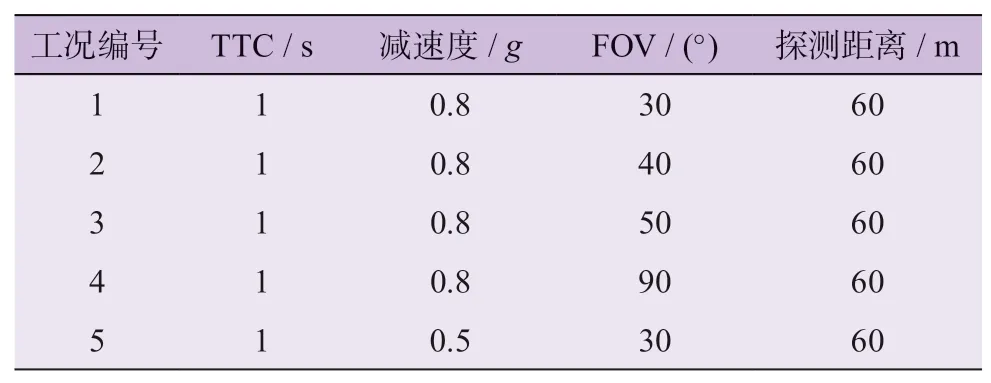
表2 仿真矩阵
目前企业研发的多数传感器探测角度在30°以内,因此仅研究AEB参数在FOV为30°、TTC为1 s、减速度为0.8g情况下案件未规避原因。对于AEB触发但仍未规避的事故,将此时PC-Crash中输出的车速、两者相对位置信息等作为碰撞边界条件加载到Madymo中,输出头部损伤参数值,包括VRUs与车辆前部碰撞时刻及VRUs头部落地时刻的HIC、HIP、头部最大角速度和最大角加速度,并将此数据与原始事故Madymo损伤参数对比,分析损伤参数值的变化情况。
3 结果及分析
3.1 事故规避情况
通过统计并绘制碰撞前事故场景,得到碰前1 s时车辆与VRUs的相对位置关系如图6所示。在碰前1 s,行人及自行车事故只有2起处于探测角度为30°的区域之外。有1起行人事故由于未在传感器探测范围内事故不能避免。电动车事故规避案例集中在90°的探测范围内,表明电动车较行人、自行车需要更大探测角度。
本文采用事故规避率η作为AEB有效性的评价指标之一,其计算公式如下:
式中:NAEB为AEB介入后事故规避数量;Ntot为所选事故总量。
图7 为不同FOV下AEB规避情况。当FOV为30°时事故规避率为45%,随着探测角度增大,当FOV为40°、50°和90°时,较FOV为30°规避率分别增加5%、10%和20%。而AEB未响应及AEB响应后仅使车速降低并未规避的案件均随着探测角度增大而减少。
为研究干燥路面与雨雪路面上AEB有效性差异,选取干燥路面摩擦因数为0.8,雨雪天气的路面摩擦系数为0.5进行仿真[28]。如图8所示,减速度为0.8g时规避率比减速度为0.5g时提高10%。因此,在雨雪天气等恶劣条件下行车,AEB系统的有效性不及干燥路面。
3.2 碰撞车速影响
通过对图9分析发现:未加AEB时筛选的20起事故初始平均碰撞车速为43.04 km·h-1,在AEB介入后平均碰撞车速降低至25 km·h-1以下,平均降速比率达到66.17%,5种工况中工况4的降速效果最明显,高达81.13%,工况5的降速最差,仅为46.28%,其余工况降速比达60%以上。
3.3 VRUs头部损伤影响
VRUs与车辆前部碰撞损伤变化见图10。
如图10所示:20起事故在五种不同AEB工况下,VRUs与车辆前部碰撞损伤都有降低。HIC平均下降了73.2%,工况4最优,能使VRUs的HIC值降低89.5%。HIP平均下降了72.7%,最大降低88.6%。最大角速度和最大角加速度分别平均下降了68.58%、49.14%。表明AEB的介入能一定程度上降低VRUs与车辆前部碰撞造成的损伤。
3.4 未规避原因分析
AEB能减少事故发生,但仍有25%的事故无法避免(不考虑VRUs未被识别的事故)。在这5起事故 (C5、C10、C12、C15、C20)配置AEB后,事故车辆车速均降低但碰撞仍然发生。图11为车辆探测到VRUs开始制动时刻示意图。其中S1指此时车辆与VRUs间距离,S2指车辆从当前车速减速到0所需的制动距离。
通过PC-Crash导出AEB开始制动时刻的TTC,我们定义为TTCb;利用公式3、4得出车辆制动时刻到VRUs的距离S1及初始车速减速至零所需停车距离S2,其中v表示车辆初始速度。当S1<S2时,车辆与VRUs便会发生碰撞。
计算结果如表3所示。
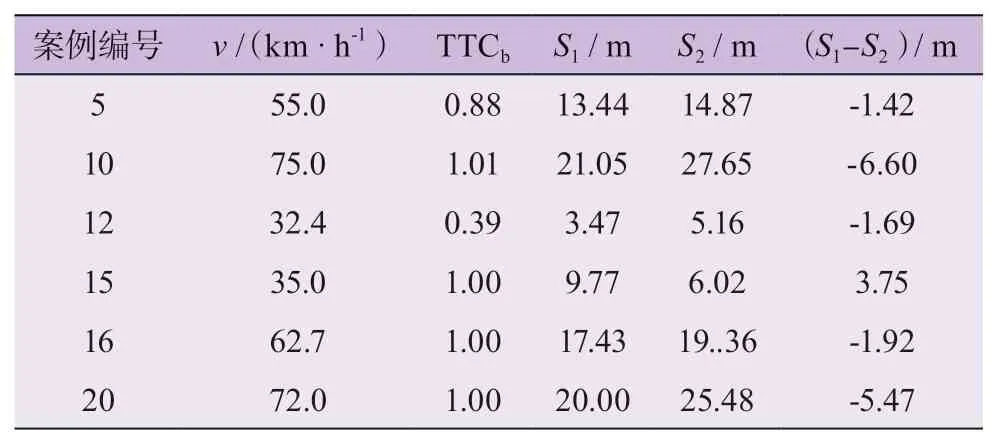
表3 车辆避撞所需距离
这些事故不能规避的原因有:1) VRUs出现在AEB探测区域内时过晚;2)事故车辆初始速度过快;3)VRUs来不及紧急制动或转向,与静止车辆发生碰撞。
在C12案件的仿真初始阶段,电动两轮车骑车人不在传感器探测范围内,随着仿真时间推进,由于电动两轮车和车辆存在速度差,骑车人较晚进入传感器探测范围,待传感器探测到骑车人时留给车辆制动的时间非常短,车辆在启动AEB的TTC只有0.39 s,制动时间不足。
C10、C20案件中,电动两轮车骑车人在AEB制动阈值时刻均处在探测范围内,车辆在接受到制动信号后均按照7.85 m/s2的减速度进行减速,但通过计算当前车速减速至零所需路程S2,与车辆当前距VRU间距离S1发现,S2>S1,因此事故不能避免。
C15案件中,在车辆加入AEB后,车辆在发生碰撞前成功将车速减至零,但由于电动两轮车与事故车辆相距过近,两者在0.12 s后会发生碰撞,在如此短的时间内骑车人无法做出应急反应,车辆与电动车仍会发生碰撞。
3.5 AEB对头部损伤风险的影响
图12 为5种案例的头部损伤参数对比。
在案例C5中,在行人与车辆前部碰撞中,自动紧急制动系统(AEB)介入后使行人头部碰撞位置由挡风玻璃变为发动机罩,HIC、HIP均大幅降低,头部损伤风险降低;而在头部与地面碰撞时,HIC和角加速度ω’相比于原始事故明显增大,表明该案例中如加装AEB可导致行人头部落地碰撞损伤风险增加。
在案例C10中,AEB介入后,骑车人与汽车初始碰撞位置发生较大变化,骑车人头部与车辆未发生直接接触而倒地,落地时刻最大角速度ω提高了9.6倍,头部损伤风险增加。
类似在案例C12中,碰撞初始位置的不同,使得骑车人头部与车辆前部的碰撞位置由左侧后视镜与发动机罩夹角处变为发动机罩,导致头部ω增大,同时与地面碰撞中损伤明显增大。
在案例C15中,AEB响应后电动车与静止车辆发生的碰撞,损伤小于原始事故中车辆撞击电动车造成的伤害。案例C20在AEB介入后骑车人损伤降低显著,骑车人头部与车辆无碰撞,损伤风险降为零,而在地面碰撞中HIC、HIP、ω’、ω均明显降低。
对这些事故加AEB前后VRUs头部与车辆碰撞及地面碰撞所造成的损伤统计得到表4。
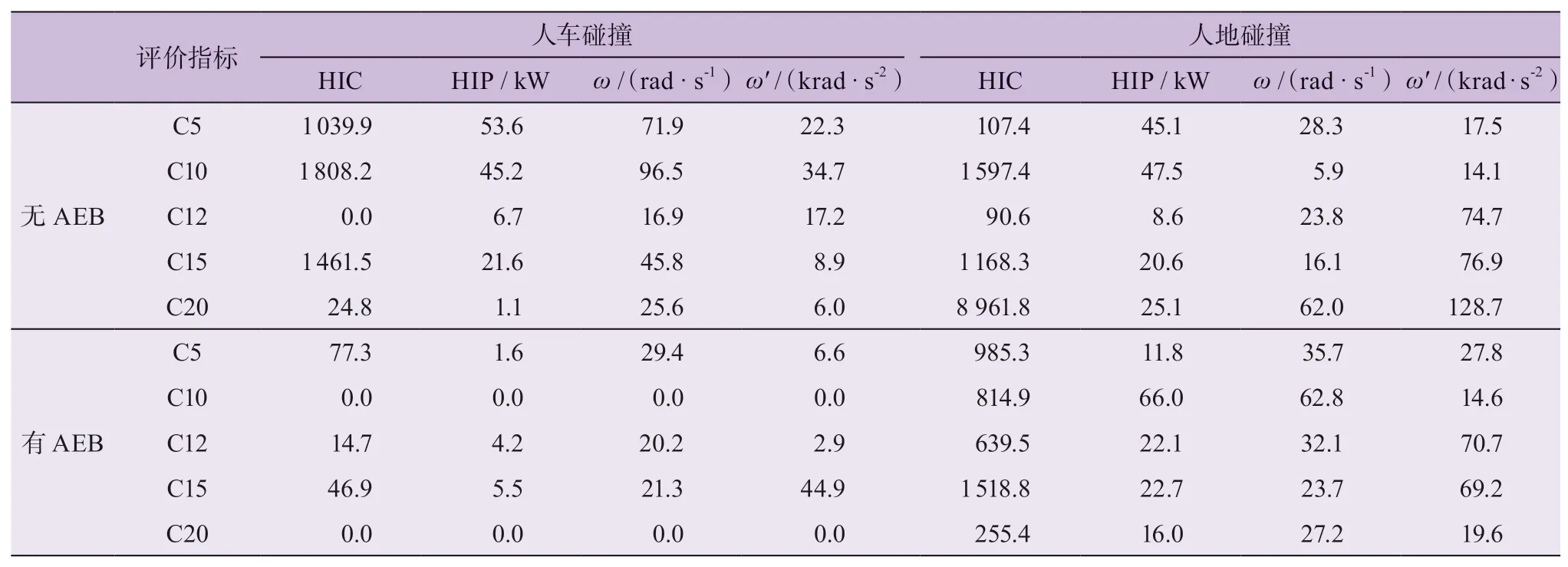
表4 加AEB前后头部损伤参数的对比
由表4可知:VRUs与车辆前部碰撞,有3起(C5、C10、和C20)事故在加入AEB后损伤降低明显。其中C10和C20在AEB介入后,骑车人与车辆碰撞初始位置及碰撞速度发生变化,导致骑车人头部与车辆无接触,因此与车辆碰撞导致的头部损伤风险消失。而C5在有AEB条件下,行人头部与车辆仍碰撞,但是此时汽车速度已大幅降低,且头部碰撞位置发生变化,行人的头部损伤相比原始损伤明显降低。C12的HIC和最大角速度有些许增大,但与原始事故损伤相差不大;C15中最大角加速度增大4.05倍,是此时电动二轮车与静止车辆发生碰撞,骑车人头部有较大旋转。
AEB对降低VRU与车辆前部碰撞产生的头部损伤效果显著,而在对VRUs与地面碰撞造成的损伤则大相径庭。五起事故中仅C20的落地损伤明显降低,其余4起事故头部落地损伤参数均不同程度增大,主要是AEB介入后对VRUs头部落地姿态产生影响,导致头部损伤存在不确定性。
4 结 论
本研究基于详实的道路弱势使用者(VRU)事故信息,利用多体仿真分析软件,对自动紧急制动系统(AEB)的有效性及VRUs头部损伤风险进行了研究,可以得出以下结论:
1) 传感器探测角FOV为90°时,AEB对VRU的规避率最大;FOV为30°时,传感器能满足多数行人和自行车事故的探测,而电动车需要更大的探测范围才能有效识别。
2) 在最优的传感器配置下仍有35%的事故无法避免,主要原因有VRUs不在AEB探测范围内;车辆行驶速度过大,超出AEB制动能力;以及VRUs出现在AEB范围内时间过迟,导致制动时长过短。
3) AEB能使碰撞车速平均降低66.17%,最大降速比可达到81.13%;在VRUs头部与车辆前部碰撞中,AEB介入后头部损伤指标HIC、头部碰撞能量HIP、最大角速度ω和最大角加速度ω’分别平均降低73.2%、72.7%、68.58%、49.14%,最优可分别达到89.5%、88.6%、85.6%、63.5%,能有效降低VRUs头部与车辆前部碰撞的损伤风险;但在落地运动中受多种变量影响,与地面造成的头部损伤存在不确定性。
