基于双目视觉的激光喷丸大幅面动态扫描系统光束指向标定方法
2022-01-13毛展晨胡永祥
毛展晨,胡永祥
( 上海交通大学机械与动力工程学院,机械系统与振动国家重点实验室,上海200240 )
激光喷丸成形采用高能短脉冲激光诱导等离子体冲击波形成高幅值瞬态冲击载荷,使材料表面产生局部塑性变形, 从而实现工件小曲率弯曲成形,由于其成形能力强、可控性好、清洁度高,因而具有广泛的应用前景[1]。 对于大型工件的激光喷丸成形一般采用动态式光路,主要包括飞行光路式系统、动态扫描式系统等。 动态扫描式系统主要通过光学器件的反射偏转实现激光指向,因其在设计上体积小、布置灵活,在实际应用中的适应性最强。
振镜系统是典型的动态扫描式系统,早期主要应用于激光平面打标。 随着激光制造技术的不断成熟,振镜系统逐渐应用于高精度的三维激光加工领域,如表面形貌测量、增材制造[2]等,包括大型工件的激光喷丸成形。 一般而言,振镜系统除了存在由扫描方式引起的固有扫描场几何畸变[3]之外,往往存在映射非线性误差[4]、控制模型近似误差、温漂、装配误差等。 大幅面动态扫描范围广,各种误差因素耦合后形成的畸变在实际应用中会造成扫描运动的失真,难以满足高精度要求的应用场景,在实际实验中必须对振镜扫描系统进行标定,以降低畸变造成的影响。
针对不同的工作场景,往往使用不同的标定方法消除动态扫描系统误差的影响,根据标定思路大致可分为基于光学模型的推导与基于数据分析的补偿两类。 前者由于实际光路系统较为复杂,易造成优化求解过程困难、耗时长、陷入局部最优解等情况。 数据驱动的标定方法主要包括校正表法、神经网络求解、多项式插值等[5-7],这种思路下的参数标定不再依赖复杂模型的求解,同时也可得到较高的标定精度,在工程应用中更具有优势。 赵毅等[8]提出了一种基于软件矫正和插补算法的振镜系统畸变矫正算法,构建离散的振镜光学偏转角与电压数字控制量之间的对应关系,有效改善枕形误差的影响。 Wissel 等[9]将光斑在相机坐标系中的二维坐标和振镜的旋转偏移量作为输入,以激光点阵在相机坐标系下的三维坐标作为输出,利用支持向量机建立映射关系实现振镜系统的标定。
一般而言,枕形误差是振镜扫描系统的主要畸变原因,无论基于光学模型推导还是采取数值分析方法,本质是建立振镜偏转与坐标之间的准确映射关系实现标定。 但对于大幅面激光喷丸成形振镜扫描光路, 工作距离和扫描范围远大于常规振镜系统,除枕形误差外,其他误差因素耦合产生的影响也被放大,常规的校正方式不仅效率低,且难以取得理想的精度。 针对上述问题分析振镜大幅面扫描工作原理,借助双目视觉建立的振镜光束指向标定方法,并通过实验测量对标定结果进行验证。
1 激光喷丸成形大幅面扫描系统
图1 是大型工件激光喷丸大幅面扫描系统,其导光光路主要由两轴振镜模块和光斑调节模块组成[10]。 光斑调节模块主要包括一对可调正交凹柱面透镜及固定球面凸透镜,工作中通过电机控制凹柱面透镜的平移和旋转实现激光的聚焦与矫正。 两轴振镜模块包括轴线相互垂直的二维振镜、D/A 盒、单体振镜控制卡以及与上位机进行通讯的控制板卡构成,通过上位机信号调节振镜驱动电压控制旋转角度可实现激光沿X 方向和Y 方向进行扫描。

图1 激光喷丸成形大幅面动态扫描系统构成
图2 展示的是激光喷丸成形大幅面扫描系统的工作原理, 对于大型构件的激光喷丸成形场景,需要根据控制算法生成加工区域的喷丸路径,利用双目视觉确定工件在振镜坐标系下的空间位姿,将喷丸路径转化为振镜坐标系下的点位坐标,再基于数学模型反求运动控制参数,实现激光喷丸轨迹控制。 此工艺流程依赖于理想的模型与算法求解,实际加工过程中模型的误差不可避免,二维振镜扫描畸变以及系统其他光学器件加工装配等因素也会引起额外的影响,导致实际喷丸位置偏离预期的目标。 因此,为使振镜系统可以控制激光指向加工区域内的指定位置,借助双目视觉测量激光实际指向并与目标位置进行比较,通过标定实现对系统误差的补偿。

图2 激光喷丸成形大幅面扫描系统工作原理
2 激光振镜扫描系统标定方法
本系统使用的振镜,可以直接通过输入坐标实现振镜运动控制,但此时输入信息对应封装时内置的工作距离,远小于实际喷丸的工作距离,显然不同的工作距离对应的实际扫描位置坐标也会发生相应的变化,如图3 所示。 假设内置工作距离为d1,实际工作距离为d2,本系统的振镜模块直接采用扫描位置坐标与相应转角成的正比关系进行驱动,则有:

图3 振镜工作原理示意图

进一步推导振镜偏转角与实际控制坐标的关系可得:

联立可得:

式中:Δx2、Δy2为目标位置与实际扫描位置的偏差。显然,为使振镜能通过输入控制坐标(x1,y1)使其运动到目标位置,除需补偿多种误差因素耦合造成的位置偏离外,喷丸工作距离也是模型计算的重要参数,需要进行标定。
2.1 喷丸工作距离标定
如图4 所示,固定靶面的初始位置,此时振镜系统处于初始化零位,定义此时靶面指示光斑位置为系统振镜坐标系的原点,记为Og,仅当振镜一偏转时激光移动的方向为X 轴,仅当振镜二偏转时激光移动的方向为Y 轴,振镜初始回零状态下激光指向为Z 轴,由此建立振镜坐标系,定义喷丸工作距离d 为振镜坐标系原点距离两轴振镜中心轴线的距离。

图4 振镜坐标系示意图
首先利用双目相机测量振镜坐标系原点Og的双目坐标, 此时保持振镜一的旋转角始终为零,设置振镜二的旋转偏移量θ2使指示光在Y 轴方向上运动,设置合适的运动参数选择间隔一定距离的分点在双目视场范围内改变标定平板靶面的位置,在N(N≥3)个不同的位置停留,利用双目视觉分别采集此时靶面截取光斑点的双目坐标(i=0,1,2…N),如图 5 所示。 将对应的 N 个光斑双目坐标拟合成空间直线, 此直线代表激光空间矢量,求出其中任意两条直线的交点O1′,作为振镜一转轴的中心O1对应振镜二发射的虚点, 由此得O1′点的双目坐标。利用已经测得的Og点、O1′点的双目坐标以及振镜两转轴的中心距e (e=50.98 mm),即可计算得出实际喷丸工作距离作为数模计算的关键参数。

图5 工作距离d 标定方法示意图
2.2 振镜坐标系标定
对于激光喷丸扫描光路,振镜坐标系的准确度直接影响喷丸轨迹的精度, 建立振镜坐标系后,由于双目相机的空间位置固定,因此双目坐标系与振镜坐标系存在唯一刚体变换关系。 如图6 所示,通过喷丸工作距离标定,已知振镜坐标系原点Og以及的双目坐标, 即得两点组成的方向向量, 记为同时利用靶面截取法得知系统初始状态下指示光的矢量,记为即为振镜坐标系 Z 轴在双目坐标系下的方向向量。 由于振镜扫描过程中始终保证振镜一偏转量为零而只转动振镜二, 因此点位于振镜坐标系的YOZ 平面内。 求解向量在向量上的投影,再与向量相减即得振镜坐标系 Y 轴的双目方向向量,记为同时可以通过向量叉乘得到 X 轴方向向量,记为记为:

图6 振镜坐标轴方向向量


2.3 振镜扫描指向标定
通过振镜坐标系的标定可以描述喷丸点位在振镜系统中的坐标,但在实际喷丸过程中,激光的实际指向往往与目标位置有所偏差,产生此类偏差的根源在于光路装配误差、模型计算误差、枕形误差等多种因素的耦合,难以通过实际物理模型对其分别进行误差补偿,因此本系统直接根据末端激光实际指向结果进行标定。 在本系统中除直接执行扫描功能的两轴振镜模块对激光的指向精度有影响,前置进行光斑调节的光路也会造成末端指向的变化,其原因在于入射光轴线偏离透镜组轴线会使激光产生一定的偏转,而在实际安装过程中这种轴线偏离不可避免。
由于在本系统的光斑调节模块中涉及柱面透镜的旋转, 导致轴线偏离状态处于动态变化的过程,为进行误差标定,对靶面上光斑位置随柱面透镜组旋转而偏移的变化进行分析。 取振镜坐标系的原点位置作为参考位置,以柱面透镜组转角为0°时指示光所指向的位置作为基点, 每隔20°取一个标定转角, 在对应的转角下观察指示光斑的偏移情况,再手动调整两轴振镜的旋转偏移量,记录指示光回归基点位置时振镜的运动控制参数作为误差拟合的数据样本,再利用误差曲线拟合在模型中对运动控制参数进行补偿。
进一步对实际靶面上光斑扫描坐标进行标定,在平面靶面上设置校正网格,对于800 mm×800 mm的范围内,以50 mm 为间隔设置方形点阵轨迹作为标定参考点,如图7 所示。 已知标定点位的理论坐标, 带入系统数学模型计算振镜运动控制参数,利用激光同轴指示光运动点阵轨迹,同时借助双目视觉测量点位双目坐标, 并变换为振镜坐标系下坐标, 由于振镜双目坐标系之间已完成标定工作,这些点位的振镜坐标可认为是实际振镜扫描位置的准确参数。 通过对比实际扫描坐标与理论点阵坐标的差值,再根据设置的校正网络进行补偿,从而实现对激光指向的准确标定。

图7 激光指向标定点阵示意图
3 标定结果分析与验证
3.1 振镜坐标系标定结果
根据前述,平移变换矩阵T 即为振镜坐标系原点Og的双目坐标,利用双目视觉重复采集50 次,部分结果表1 所示。 对测量数据进行均值化处理并通过标准差验证准确度, 其中X 和Y 向标准差小于0.04, 接近相机深度方向的Z 坐标标准差为0.213,测量数据均符合3σ 准则, 则最终的平移变换矩阵为:


表1 振镜坐标系原点测量结果
图8 是系统初始状态激光矢量及振镜二单独偏转时靶面光斑矢量拟合结果,由此可计算得到振镜坐标系坐标轴方向在双目坐标系下的标准正交基进一步得坐标系旋转变换矩阵

图8 坐标轴激光矢量拟合结果
3.2 喷丸工作距离标定结果
图9 是取不同旋转偏移量对应指示光轴的直线拟合结果,由于喷丸工作距离的计算依赖拟合直线间交点的坐标信息,将双目测量结果统一转化至振镜坐标系,同时将直线投影至YOZ 平面保证直线间不会因为异面而不产生交点,此时交点的Z 坐标值减去两轴振镜的中心距即为喷丸距离测量结果。

图9 不同旋转偏移量下激光矢量拟合结果
任取两组不同旋转偏移量的直线拟合结果观察交点,结果如表2 所示。 由表可知,拟合直线形成的交点Z 坐标大致处于[1616,1622]区间,且分布较为稳定,利用3σ 准则剔除利群数据再取平均值,由此得到最终喷丸工作距离d=1568.919 mm。

表2 拟合直线交点Z 坐标计算结果
3.3 激光指向标定结果
图10 是两轴振镜运动参数与柱面透镜转角的变化,由于同轴度误差来源于轴线偏离,因此随着旋转电机旋转,误差趋势呈现绕圆趋势,这与前述光斑位置变化趋势一致,因此对曲线拟合可得振镜运动控制参数ex、ey与柱面透镜转角α 的关系式为:

图10 振镜控制参数与柱镜转角关系

由于同轴度误差随激光光程变化而线性变化,因此借助靶面边缘角点(400,400)进行验证,同样调整柱面透镜转角变化观察光斑位置变化,结果见图11,光斑初始状态下边缘偏离最大不超过1 mm。在实际喷丸时,激光光斑聚焦直径为3 mm,约为初始状态的1/4,因此对应的同轴度误差也随之缩小,小于0.25 mm,光斑基本重叠,符合工作的需求。

图11 同轴度误差标定结果
对于激光指向标定,将实际点阵坐标与标准网格坐标的插值进行曲面拟合,得到的误差曲面如图12 所示,曲面整体呈现漏斗状,在初始原点处误差最小,随着光程的增大逐渐向外辐射,最边缘处实际扫描位置偏离目标超40 mm,在X 和Y 方向上都有近30 mm 的误差,如此明显的误差一方面是由于封装后的振镜模块在未使用平场聚焦透镜的情况下会造成线性化误差[11],另一方面在于光路装配误差对末端的振镜指向产生影响,而这些误差在超过1.5 m 的工作距离下被显著放大。
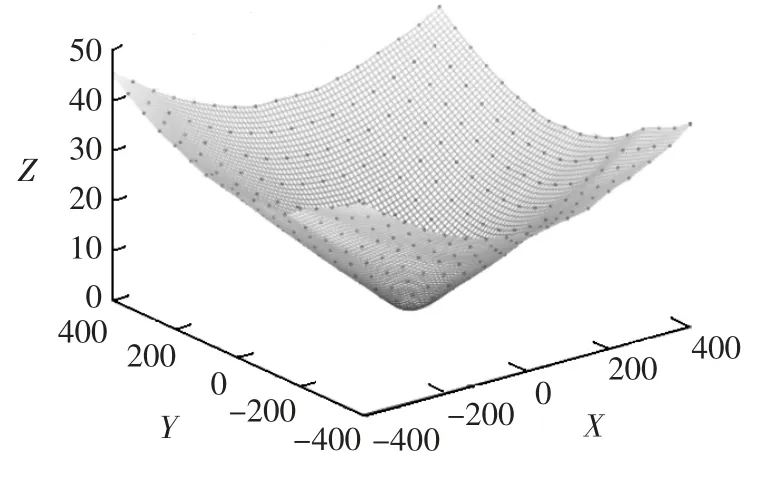
图12 激光指向误差曲面分布
将振镜扫描的实际扫描位置与对应的X、Y 方向上的误差进行曲面拟合,再将拟合曲面多项式作为误差补偿加入振镜控制坐标计算的输入端,从而实现对振镜运动控制参数的补偿,标定后激光指向结果见图13,扫描点位与标准网格基本重合。 图14对不同坐标处的误差情况的进一步分析,可以对于标定区域内X 和Y 方向上的激光指向误差基本小于0.5 mm,符合相应系统功能指标。

图13 振镜扫描指向误差标定结果

图14 X 和Y 方向振镜扫描指向误差
4 结束语
本文提出了一种基于双目视觉振镜大幅面扫描系统分步标定方法,实现了激光喷丸过程中激光在靶面上的精确指向。 首先通过双目相机采集光斑坐标拟合激光矢量,利用光束方向不变的性质标定喷丸工作距离, 再建立双目-振镜坐标系之间的刚体变换,实现对振镜坐标系的标定。 对于末端激光指向误差, 首先考虑轴线偏离引起的同轴度误差,建立振镜控制量与柱面透镜组的变化关系进行补偿,再通过标准点阵建立校正网格,在数学模型输入端增加扫描误差分布,实现对激光指向误差的标定。 结果表明,标定方法可以有效克服激光指向误差,精度符合激光喷丸成形的工艺要求。
