混合决策下认知无人机网络中继选择算法
2022-01-13包海东冀保峰陈珍珍王贡献
包海东,冀保峰,2,陈珍珍,王贡献
(1.河南科技大学 信息工程学院,河南 洛阳 471023;2.电子科技大学 航空航天学院,四川 成都 611731;3.中国一拖集团有限公司,河南 洛阳 471000)
0 引言
目前,无人机协作通信凭借其移动性和便捷性的优势,受到了广泛关注[1]。但对无人机空地组网通信系统的研究相对较少,大多集中在空地通信系统的性能分析、通信资源分配、数据内容和系统动态参数的调整等方面[2-4]。文献[5]通过确定联合兴趣度、转发历史比率和中继物理状态3个中继属性因子,提出了基于中继自私行为分析的中继选择算法。文献[6]在D2D通信中提出了一种以数据内容和能量为准则的中继选择算法。文献[7]提出了一种在延迟约束下基于深度强化学习算法的缓冲中继选择算法。文献[8]提出了一种基于博弈论的中继选择算法。文献[9]与文献[10]分别在译码转发和放大转发协议下,提出了针对过时信道状态信息的中继选择算法。文献[11]研究了最佳阈值下协同最大比合并检测技术,并推导出了最优阈值函数。文献[12]提出了一种在车载网络中的鲁棒中继选择算法。文献[13]提出了一种缓存协作网络中的最大增益中继选择算法。文献[14]则提出了一种次优中继选择算法,降低了算法复杂度。
文献[15-17]在放大转发协议下,分别基于Rayleigh信道和α-μ信道推导出认知中继网络的中断概率、误码率和有效容量的精确闭式解。文献[18]在获取信道状态信息成本条件下,基于最优停止理论,提出了最大选择概率和最大频谱效率期望中继选择方案。文献[19]研究了在统计时延约束下,三节点中继选择系统的最大数据可达率。文献[20]研究了在5G场景下适用于网络动态变化的中继选择算法。文献[21]提出了一种基于节点位置预测、中继激活时间和二级用户传输速率的中继选择算法。但上述相关研究,均未考虑系统链路切换以及信道质量短时不可靠情况下造成的性能损失,尤其对于复杂网络下多链路决策的研究较少。
因此,针对认知协作网络中可能短时出现的通信连接效果差、可靠性低的问题,综合考虑链路信噪比(signal-to-noise,SNR)、时延和链路切换等待值参数,提出了混合决策下无人机中继选择算法。混合决策下判决有利于提升认知协作网络中的通信可靠性,降低系统数据包丢失率。整体性能评价更加合理、更加面向实际,并且从系统的不同维度出发,全面提升了系统性能与可靠性。
1 系统模型
系统模型如图1所示。在图1中,由于部分基站过载或损坏,一级用户、二级用户(认知车辆)与次接收端通过无人机中继节点进行通信。认知过程包括3种方案:衬垫共享模式(underlay,UL)、填充共享模式(overlay,OL)以及混合式共享模式。在UL下,当检测一级用户工作时,一级用户与二级用户共用信道,并且同时发送数据,在二级用户处施加功率限制。当检测到信道空闲时,功率限制不存在。而在OL下,只有检测到一级用户停止工作时,二级用户才能工作;但当检测到一级用户开始工作时,二级用户必须立即停止工作。而混合式共享模式则是当检测到信道繁忙时,以UL接入信道传输数据,而当检测到信道处于空闲状态时,再以OL接入信道传输数据,接入方式依据传输任务类型和检测结果综合而定。
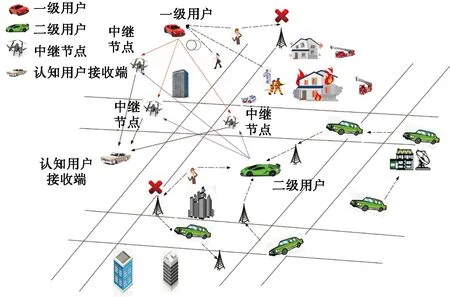
图1 系统模型
UL下,在繁忙状态下,无人机中继i处接收到的信号为:
(1)
其中:yRi为无人机i处的接收信号;Isu为认知车辆处的发射功率,W;Ipu为无人机处的发射功率,W;gsu,i为认知车辆节点与无人机i之间的信道增益;kpu,i为认知车辆与无人机中继i之间的信道增益;τR,i为无人机i处的高斯噪声。此时经过中继功率归一化后,认知车辆接收端接收到的信号为:
(2)
其中:yRsu,i是认知车辆接收端的接收信号;M为放大因子,M=Isu|gsu,i|2+Ipu|gpu,i|2+N0,N0为噪声;IR为无人机中继处的信号发射功率,W;ksu,i为第i个中继与认知车辆接收端的信道增益;τRsu,i为认知车辆接收端的高斯噪声。
在认知车辆接收端,接收端的链路信噪比可以表示为:
(3)
认知车辆节点的发射功率不能对持牌车辆产生较大干扰,施加限制条件表达式为:
(4)
其中:Q为干扰容忍限制阈值。空闲状态下,无人机处于无干扰存在,故信噪比为:
(5)
OL下,在填充策略下,只允许信道状态检测为空闲时,认知车辆接入频段,链路信噪比为:
(6)
混合式共享模式下,繁忙状态时,链路信噪比为:
(7)
此时功率限制与UL下相同,如式(4)所示。而当空闲状态时:
(8)
2 混合决策无人机中继选择算法流程
在所提场景下,由于部分基站损坏且认知车辆节点所处区域存在某些障碍物,在部分时隙中认知节点与部分无人机之间可能难以形成可靠链路,因此采用混合决策下无人机中继协作以寻求较好链路质量,降低中断概率,提高阴影区域通信可靠性,混合决策算法流程图如图2所示,算法主要包括6个部分。
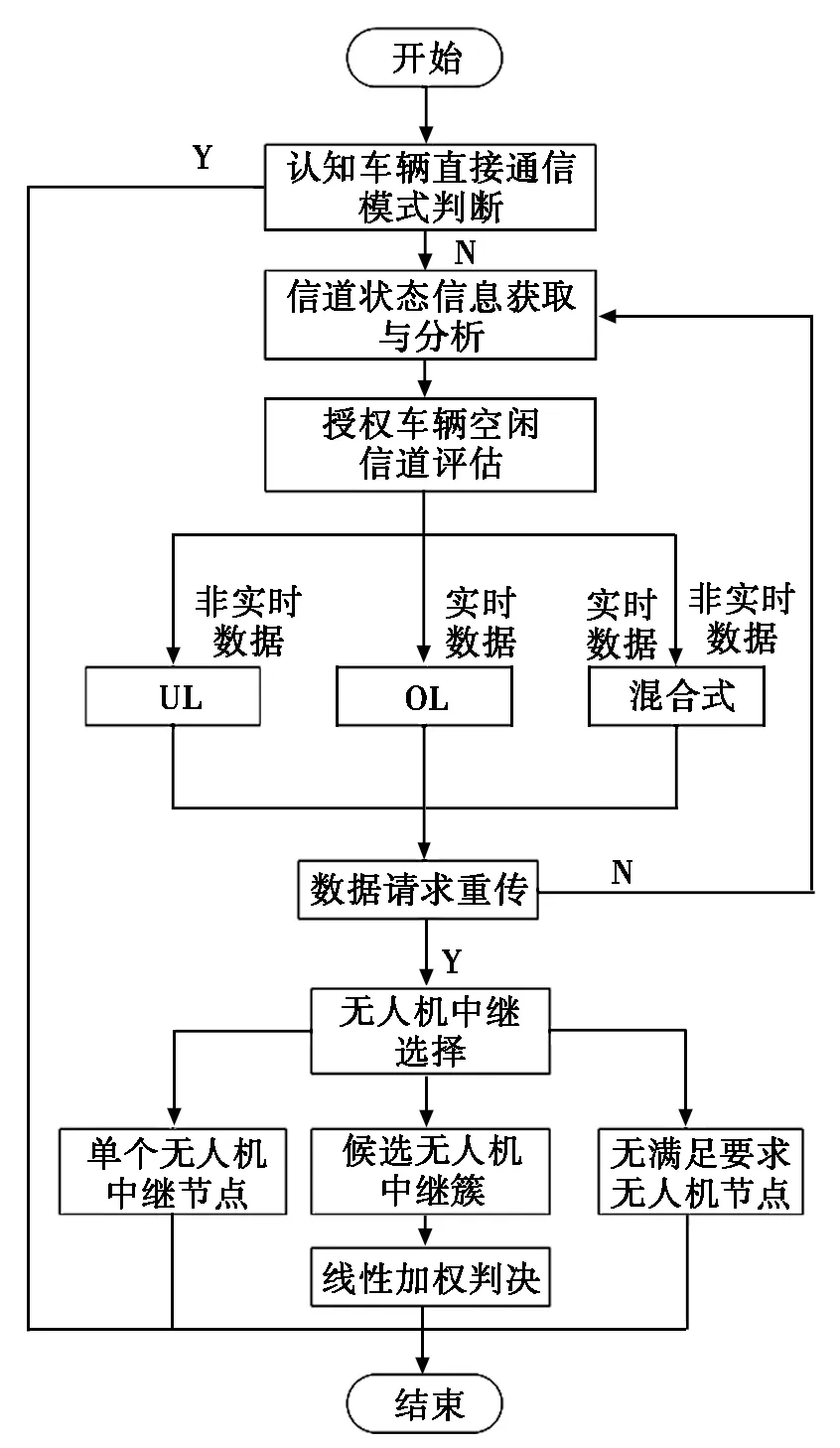
图2 混合决策算法流程图
(Ⅰ)车辆直达径判断:首先,认知车辆在恰当时隙不经由无人机转发数据,而直接向接收端发送数据。根据接收端接收到的信号信噪比、时延和误码率等指标,判断是否存在直达径。若信噪比等指标达到预设值标准,则认知车辆无需无人机中继转发数据,而是直接与接收端进行通信;如果接收信号没有达到预设标准,则需要无人机进行信号转发。
(Ⅱ)信道状态信息获取与分析:认知网络开始获取周围空闲候选无人机状态信息、参与遴选的无人机数目、用户相关参数与相关状态,以及整个网络的相关频谱信息。
(Ⅲ)空闲信道评估:车辆频谱接入策略根据不同任务类型和信道状态检测结果权衡而定。当检测到信道为繁忙时,发送缓存或者非实时信息;当检测到信道为空闲时,可以传输实时信息;频谱感知由繁忙转为空闲时,变为混合式共享模式。
(Ⅳ)数据请求重传:车辆节点开始发送数据重传请求,获取最新系统参数。并对接收到的信息进行筛选,确定满足要求的所有无人机节点,回复节点确认情况,对不满足要求的无人机节点不进行回复,同时结束本轮数据请求重传。
(Ⅴ)无人机中继簇遴选:认知用户接收端分别对遴选过的无人机所在链路的信噪比、时延以及节点候选时间进行初步判决。如果中继节点的各维度参数都达到判决要求,则节点进入遴选节点簇。
(Ⅵ)中继簇判决处理过程:对已经进入遴选阶段的无人机节点簇的各维度参数分别进行同质化处理,确定权重值并分配系数进行线性加权,形成判决函数。以线性加权函数值的大小作为判决依据,判决函数值最大的无人机中继胜出,为认知车辆提供数据转发服务。
3 参数判决与处理
认知车辆接入链路连通时延:认知车辆接入时延包括车辆与无人机之间的链接以及无人机与接收节点之间的链接,因此时延也必须考虑两部分,即认知车辆与无人机、无人机与接收节点两条链路的时延之和。其表达式为:
Z1,i=w1,i+w2,i,i=1,2,…,K,
(9)
其中:w1为认知车辆与第i个无人机中继之间的连通链路时延标准化表达;w2为第i个无人机中继与接收节点连通链路之间的时延标准化表达。具体表示为:
(10)
其中:Φmax,u、Φmin,u分别为认知车辆连通无人机所需要的最大、最小时延;Φi,u为认知车辆与第i个无人机中继之间的连通时延。
(11)
其中:Φmax,d、Φmin,d分别为无人机与接收车辆连通链路所需要的最大、最小时延;Φi,d为第i个无人机中继与接收车辆连通链路之间的连通时延。
链路信噪比:确定每条无人机中继链路的信噪比,信噪比作为衡量链路信号质量的判定标准之一,在本文决策算法中同样加以考虑:
Z2,i=SNRi。
(12)
链路切换值:当车辆进入信号盲区时,尽管部分无人机与节点之间链路质量较好,但由于使得链路切换等待时间较长,进而可导致联路通信中断,切换等待值为[22]:
(13)
最优无人机中继确定:分别根据链路接入连通时延、链路信噪比以及链路切换都达到容忍阈值,进而根据线性加权函数Z(x)的值作为筛选条件。其中,∂1,∂2,∂3分别为线性加权系数,且满足∂1+∂2+∂3=1,链路中Z(x)最大者确定为候选中继,判决式为:
Zi=∂1Z1,i+∂2Z2,i+∂3Z3,i。
(14)
4 仿真实验结果与分析
本文使用MATLAB仿真软件对所提出的混合决策下认知无人机网络中继选择算法进行了实验,依据中断性能优劣判断算法的先进性。仿真参数如表1所示。设置Mento Carlo次数为100 000次,信噪比阈值为0.1,无人机中继处发射功率均为1.02 W,K值为3。在下列仿真实验中,pi为空闲频谱检测概率,Q为干扰容忍限制阈值,m为nakagami-m信道参数。本文在不同频谱接入策略下,对不同参数的影响进行了探究。仿真结果表明本算法具有一定的优势。
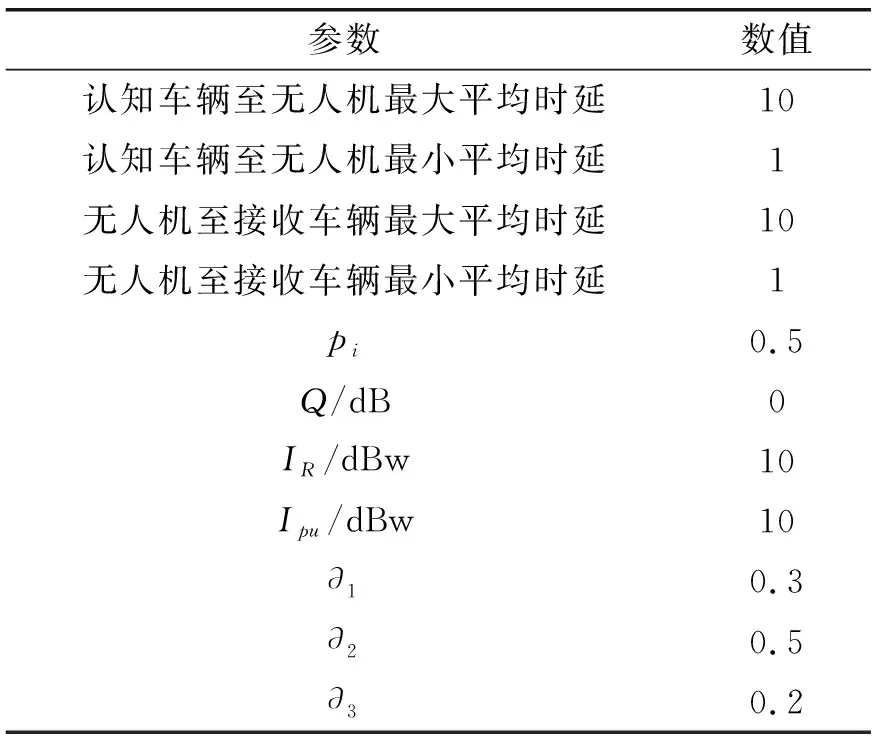
表1 仿真参数
图3为认知网络中不同信道空闲概率时,中断概率随着认知用户发送信噪比的变化情况。由图3可以看出:随着认知车辆发送信噪比的逐渐上升,中断概率在不断下降。而且随着认知网络中信道空闲状态概率的增大,系统的中断概率也随之不断下降,即频谱共享逐渐面向无功率限制,链路连通性也随之变强。
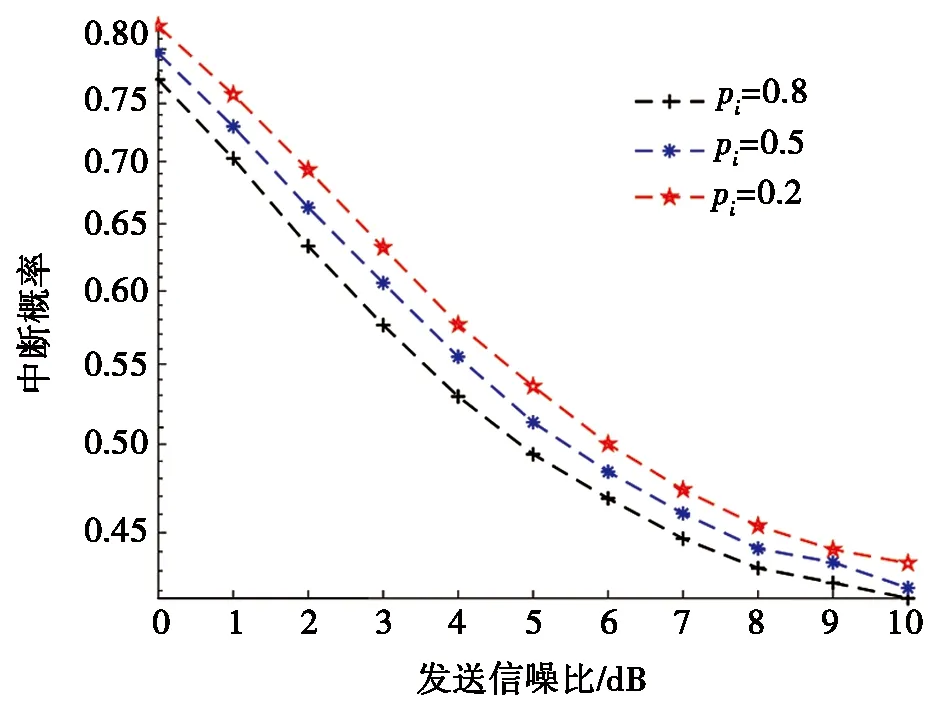
图3 不同信道空闲概率下中断概率随信噪比变化曲线
图4为UL下不同决策参考与不同m值时中断概率随着车辆发送信噪比的变化情况。由图4可以看出:随着车辆发送信噪比的逐渐上升,中断概率在不断下降。当决策算法固定时,随着m值的增大,中断性能也在不断变优。考虑到在UL下,认知车辆行为对一级用户干扰的限制,因此,中断性能下降并不是很明显。本文所提算法由于具备一定程度的延迟容忍与切换容忍,中断性能随着车辆发送信噪比的增大,较文献[16]中单因子决策算法下降33%。
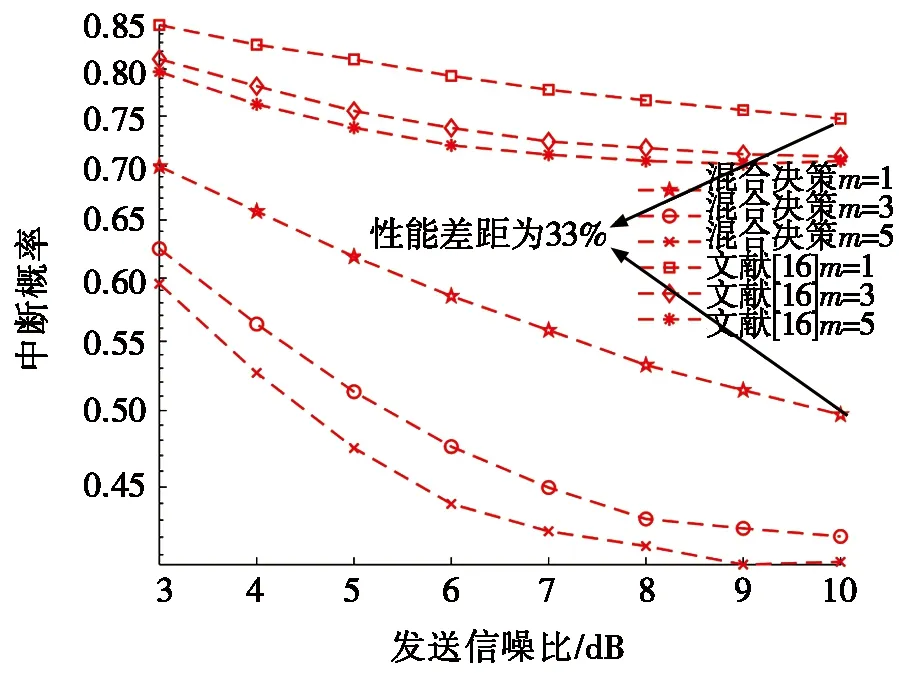
图4 UL下不同m值时中断概率随信噪比变化曲线
图5为在UL下不同决策参考与不同Q值下的中断概率随着车辆发送信噪比的变化情况。由图5可以看出:随着车辆发送信噪比的逐渐上升,中断概率在不断下降,并且随着Q值的不断变大,中断概率不断下降,这是因为功率限制的不断减弱。
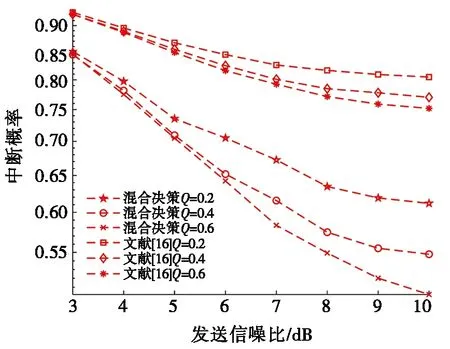
图5 UL下不同Q值时中断概率随信噪比变化曲线
图6为OL下不同决策参考和不同m值下的中断概率随着车辆发送信噪比的变化情况。由图6可以看出:随着车辆发送信噪比的逐渐上升,中断概率在不断下降,并且随着m值的增大,曲线间的差距逐渐变小。考虑到在填充策略下,认知车辆没有对一级用户干扰的限制,因此,不必考虑二级用户可能对一级用户所产生的干扰,此时,中断性能较文献[16]中单因子决策算法下降30%。

图6 OL下不同m值时中断概率随信噪比变化曲线
图7为不同Q和不同m值时,混合决策中继选择算法的中断性能对比。Q值越小,说明发送信噪比限制条件越苛刻,中断性能越差。m表征信道条件的好坏,m越大,则信道质量越好;m越小,信道质量越差。故由图7可知:Q值对中断概率性能的影响要比m值的影响要大。因为在两者均为3倍差距时,Q值大的中断概率性能相对较好。
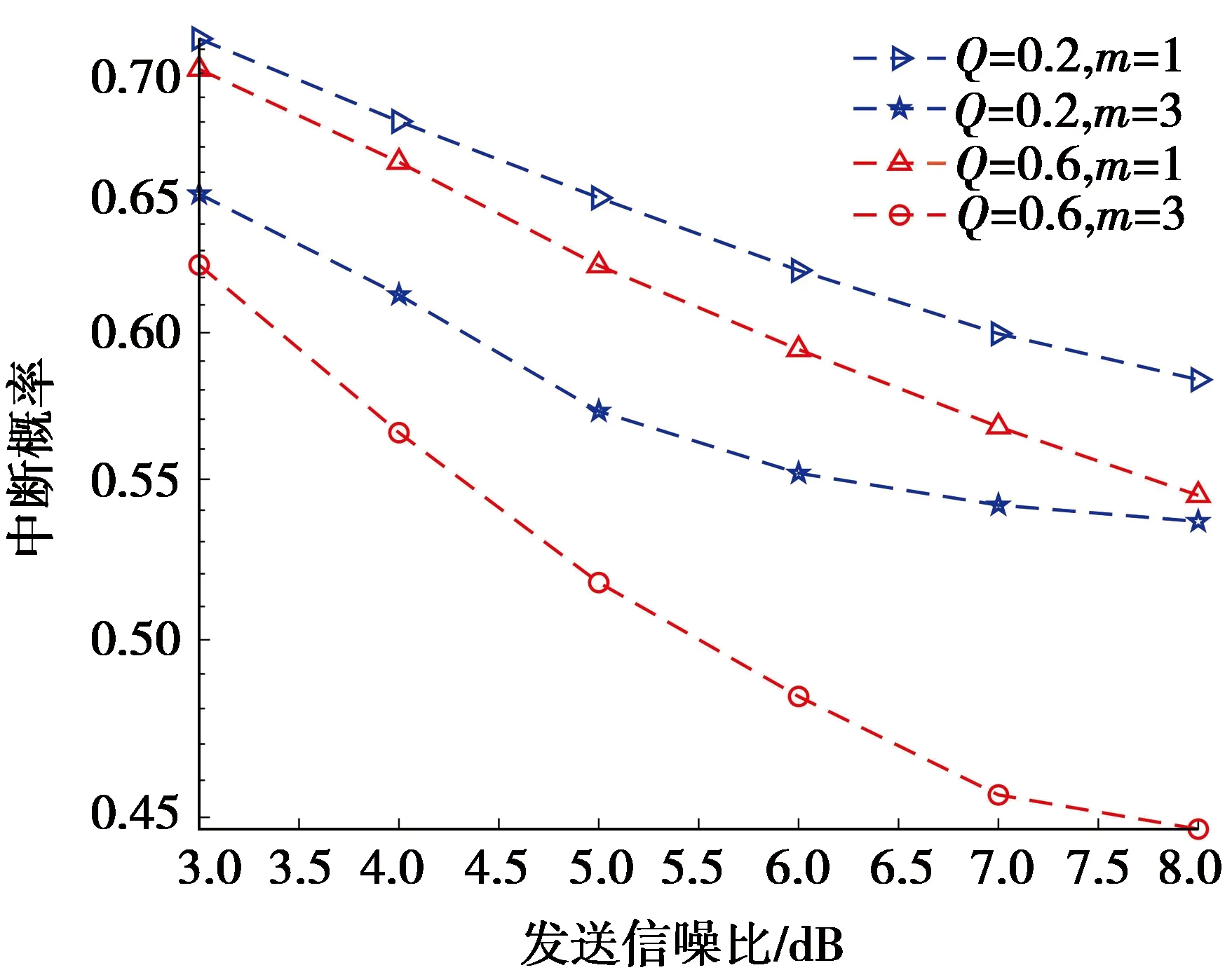
图7 不同Q且不同m值时中断概率随信噪比变化曲线
图8为基于不同共享模式和不同m值时,混合决策中继选择算法的中断性能对比。由图8可以看出:随着认知车辆发送信噪比的逐渐上升,中断概率也随之不断下降。并且随着m值的增大,中断性能也不断变优,不同m值之间的性能差距也不断变小。但是两种共享模式之间始终存在差距,这是由于虽然两者均具备面向延时容忍和切换容忍的设计,但是不同共享模式下的功率限制不同,性能发挥也就有所不同。
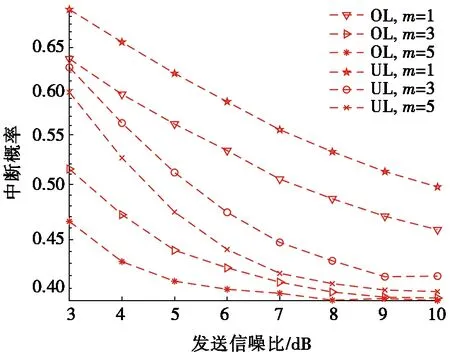
图8 不同共享模式和不同m值时中断概率随发送 信噪比变化曲线
5 结论
本文在认知协作网络中提出混合决策下无人机中继选择算法。分别在UL、OL和混合式3种共享模式下对中断概率进行了仿真。混合共享模式下,随着pi的增大,中断概率也随之不断下降;UL下,随着Q和m的增大,中断性能不断变优,不同Q和m之间的性能差距不断变小,并且Q的响应要大于m的响应;OL下,随着m的增大,中断性能同样不断变优。本算法相较文献[16]中决策方法,在不同的频谱准入策略下,中断概率分别下降了30%和33%。接下来将对多参数决策系统的中继选择算法进行研究,并对系统性能进行分析。
