北斗和超宽带定位技术在电力系统中的应用
2022-01-12朱翔宇
朱翔宇,于 佳
(1.国网江苏省电力有限公司南京供电公司,江苏 南京 210000;2.南瑞集团有限公司(国网电力科学研究院有限公司),江苏 南京 210000)
0 引言
随着第三代北斗卫星的顺利发射组网和北斗定位导航软硬件的持续发展,北斗系统的民用化发展正在快速推进[1-3]。目前整个北斗系统应用的市场竞争环境和产品商业化程度亟待完善,围绕北斗系统的军用和民用产品体系也有待成熟,尤其是以北斗定位导航芯片为代表的核心产品的成熟发展任重道远[4-6]。电力北斗系统的规模化应用与产业格式,将极大地推动北斗产业的快速发展。电网作为重要能源基础设施,与国家安全和国防建设的关系极为密切。当前,推动电网企业军民融合深度发展,必须按照“立足军民综合、开展双向服务、推动合作发展”的思路,承担平战结合的服务保障能力建设任务,平时服务社会、紧急时服务军队,持续做好国防战略备份[7-9]。
目前,由于北斗卫星定位技术因受建筑物、障碍物等的阻挡导致室内无法获取定位信息,变电站作为电网的重要组成部分,其稳定运行直接影响到电网安全,在变电站室内外运检作业过程中,存在人员作业路径不清、安全区域不清、安全防范不到位的情况,导致危险事故发生的隐患。
通过充分利用北斗室内外无缝定位技术,可以解决室内定位信号弱的难题,做到用户室内外移动无感知[10-13]。同时可以对人员巡检路线进行有效检查,确保每个设备都巡视到位。
1 北斗RTK高精度定位研究
高精度定位目前应用最广的是实时动态测量(Real Time Kinematic,RTK)技术[14],RTK以相对定位为基础,需要基准站、流动站之间协同工作。具体工作流程为:基准站接收卫星观测数据,计算差分改正数,将计算得到的改正数或基准站的原始观测数据进行编码,然后传送给流动站;流动站实时的获得基准站的差分改正数或原始观测数据(伪距观测值,载波相位观测值)及位置数据,并对其进行解码,根据相对定位的原理实时地计算并显示用户站的三维坐标。
RTK 技术的数据处理流程如图1 所示。开始时,流动站需要确定其概略坐标,并使用高速数据传输错误纠正技术确定整周模糊度,当确定整周模糊度后,在基星不变且卫星信号不失锁的情况下,可以将上一个历元的整周模糊度作为已知值代入双差观测方程直接求解流动站的坐标未知数。

图1 RTK数据处理流程
相比于单北斗定位,多模定位具有更多可用卫星,可形成大量的冗余观测数据,利用数据之间的相关特性可降低整周模糊度的搜索区间,加快模糊度的搜索速度;同时多频组合观测值具有长波长、弱电离层延迟、低噪声等特点,在周跳探测与修复、整周模糊度固定方面有明显的优势。
多模多频RTK技术可实现“快速、准确、可靠”的高精度实时动态定位,数据处理流程如图2 所示,主要包括误差模型的精确修正、多频观测值组合、多频周跳探测与修复、差分方程构建与滤波估计、组合模糊度的快速固定等内容。

图2 多模多频RTK数据处理流程
2 室内超宽带高精度定位研究
超宽带(Ultra Wide Band,UWB)是一种持续时间短的脉冲射频技术[15-16],在尽可能最低的中心频达到尽可能高的带宽率。超宽带系统通过发送一个脉冲波形来实现这个带宽。提出的UWB 定位应用方法适合需求高精度定位的场合使用,是目前世界上最高精度实现移动物坐标、移动轨迹的实时监测方法。
超宽带系统可以使发射器和接收器同步,并随着时间推移,能够非常详细地测量接收波形。这使得准确地测量发射器和接收器之间的距离成为可能。一般情况下,2 个UWB 定位传感器之间最短的距离是传送脉冲的直接路径。领先的脉冲第一个到达的能量前缘,即为所测量的发射器和接收器之间的距离。基于到达时间差、到达角度和双向飞行时间,可以构造实时定位系统。
超宽带定位原理为:在每个单元中,根据现场的实际地理环境,按照满足定位需求的原则,在场地四角安装UWB 定位接收器,这些UWB 接收器通过以太网建立通信;系统配置好后,即可进入工作状态。
工作过程为:
1)标签向接收器发送信号,周边的接收器同时接收信号;
2)接收器接收信号,测量每个标签的数据帧到达接收器天线的时间;
3)利用参考标签发送过来的校准数据,确定标签到达不同接收器之间的时间差,并利用三角定位技术及优化算法,结合配置好的接收器坐标计算出标签位置。
3 室内外高精度定位无缝衔接技术研究
为解决无缝切换问题,提出了北斗+UWB 的室内外无缝定位系统,研究利用室内外环境下的无缝定位自适应的切换算法实现这一目标,同时可通过增加阈值机制有效避免室内外定位系统反复切换造成的功耗和运算量的资源浪费,从而实现北斗卫星定位技术和室内UWB 定位技术的无缝连接。在室外环境中利用北斗卫星定位技术进行定位,在室内外交界处切换为北斗/UWB 融合定位模式,进入室内后切换为UWB 定位模式。无缝定位切换模型如图3所示,其中,AB1 为辅助基站,RB1 为室内和室外的交叠位置的基站,MB1 和MB2 为两个不同室内区域的主基站。
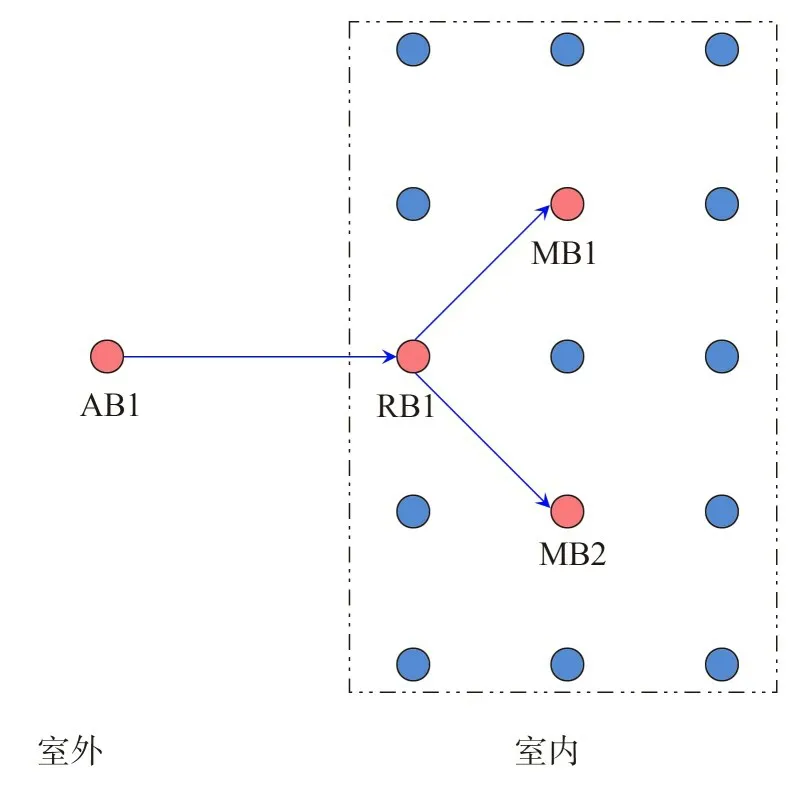
图3 无缝定位切换模型
实现无缝切换的步骤为:
1)定位感知层实时检测标签至基站的发送与接收时间变化(以到达时间差定位算法为例,利用发送与接收时间差可计算标签的坐标位置信息),并定时上报至后端切换模块,与此同时北斗终端模块实时检测接收卫星信号的数量;
2)后端处理模块通过标签至基站反馈的时间变化,根据定位算法实时计算检测位置坐标信息,并反馈至后端切换模块;
3)由于卫星信号和基站发射信号在室内外交叠处会存在一定延误[17],致使瞬间数据信息的判断不准确。此时后端切换模块将会同时针对卫星信号的检测数量和室内定位算法进行判断,当后端切换模块在窗口时间内检测到的卫星信号数量不小于4 时即可切换至室外定位模式,并开启北斗定位模式,关闭UWB 室内定位模式,并计算出经纬度坐标位置信息,从而实现定位;当后端切换模块检测到的卫星信号数量小于4 时,此时室外位置信息无法实现定位,即可切换关闭北斗定位模式,切换至室内UWB定位模式,并重新根据室内定位算法并完成定位。阈值以卫星信号数量为基础,即卫星信号数量不小于4,即阈值达到4 或以上标准时,自动切换到北斗定位模式,反之亦然。
无缝定位技术的统一是以北斗卫星定位网络研究基础上的可扩展模型,即UWB室内定位网络是北斗卫星定位网络上的扩展,位置信息的准确获取是解决无缝定位系统的关键问题,终端从室内环境中获取准确的位置坐标信息,直至进入到室外接收到北斗卫星信号,并利用北斗卫星定位完成室外位置信息的获取。解决无缝定位技术的关键问题,首先在于如何处理好室内坐标系与室外北斗坐标系之间的关系;结合相对位置与绝对位置的特点,为了统一室内外坐标系关系,将室外北斗绝对坐标信息转换成以距离表示的相对坐标关系,统一到室内的起点相对基站坐标。为基站的绝对位置信息与相对位置信息标定与转换,AB1 为辅助基站,RB1 为室内和室外的交叠位置的基站,MB1 和MB2 为两个不同室内区域的主基站。AB1 可接收良好的北斗定位信息,其获取的坐标信息为绝对位置信息;RB1 约定与AB1 间保持同一水平面上,并定期进行测距,根据距离和绝对位置坐标信息即可求得RB1 的绝对位置信息,且RB1 可实现位置信息的监测和校对;MB1 与MB2 和RB1 间建立起位置同步信息确认机制。
4 北斗和超宽带室内外无缝定位处理软件
4.1 北斗和超宽带室内外无缝定位处理软件研究
针对北斗+UWB 室内外无缝定位后处理软件,其技术关键在于北斗定位结果与范围内的UWB 定位结果的无缝切换以及转换,即在两种定位模式下,移动端的定位坐标应该为相同的,才能保证定位结果的一致性。如此,就需要在统一两种定位模式的坐标系统以及时间系统,使整个监测范围区域处于一个统一的坐标系统下,保证监测结果不随定位模式的转换而发生错误。
4.1.1 时间的统一
为实现北斗+UWB 联合定位,首先需要保证北斗时间系统、UWB 基站时间系统的一致性[18]。北斗时间系统由北斗主控站的原子钟所控制,各地面监控站和北斗卫星上的原子钟均应与主控站的原子钟同步,并测出卫星钟的钟差,然后将钟差信息编入导航电文注入卫星,并随星历向用户发布。UWB 各基站的时间系统可以通过授时进行时间同步,二者之间不可避免地存在着微小差异,这种时间上的微小差异将会给定位结果带来较大的误差,因此必须通过精确比对加以测定。
4.1.2 坐标系统的统一
在卫星定位系统中,GPS 星历是以WGS-84 坐标系为坐标框架给出的[19],而北斗卫星的星历是以我国的CGS2000 坐标系为坐标框架的。两个坐标系的原点、尺度和坐标轴指向都不尽相同,二者之间的关系可以用常用的布尔莎(Bursa)模型或者莫洛金斯基模型加以描述。以布尔莎(Bursa)模型为例,CGS2000 坐标系中的坐标可以通过式(1)转换到WGS-84坐标系[20],即

式中:X0、Y0、Z0为平移参数;u为尺度参数;εX、εY、εZ为旋转参数。上述7 个参数可以通过在两个坐标系中都具有精确已知坐标的公共点加以确定,并可以根据实际情况进行分析检验,剔除不显著的参数,得到三参数、四参数、五参数或六参数转换模型。
在联合解算时,需要根据UWB 基站的坐标系统情况进行与北斗坐标系统一。如UWB 基站坐标是WGS-84坐标系统,应首先将北斗卫星在CGS2000坐标系中的坐标利用式(1)转换成WGS-84 坐标,然后在WGS-84坐标系下进行统一解算,所得到的定位结果属于WGS-84 坐标系。类似地,也可以利用相同的方法,将GPS卫星在WGS-84坐标系中的坐标转换成CGS2000坐标,然后在CGS2000坐标系下进行统一解算,所得到的定位结果属于CGS2000坐标系。
4.2 北斗和超宽带室内外定位试验平台管理软件
在该平台软件系统下,可以实现变电站内对巡检运维人员从室内到室外的全范围实时跟踪定位,同时,在基于对系统监控范围内的部分危险系数较高的设备设施进行坐标采集后,监控巡检运管人员距的以上设备设施距离,划定安全操作空间,设置安全运管巡检路径区域,保证巡检运维人员的工作安全。
针对北斗+UWB 室内外无缝定位后处理软件,在统一两种定位模式的坐标系统以及时间系统,使整个监测范围区域处于一个统一的坐标系统下后,完成了北斗定位结果与范围内的UWB 定位结果的无缝切换以及转换的是数据融合方案设计,即实现在两种定位模式下,移动端的定位坐标为相同的,保证定位结果的一致性,保证监测结果不随着定位模式的转换而发生错误,同时,基于电力系统特殊的应用场景以及应用方式,有针对性地研究了变电站等复杂电磁环境下的算法模型,并根据相关模拟数据对北斗+UWB 室内外无缝定位后处理软件的算法模型进行试验性调整,保证在实际应用环境的定位精度。
对于北斗和超宽带(UWB)室内外定位试验平台管理软件,在基于该平台软件的功能需求,搭建了整个平台管理软件的应用框架以及界面设计,对设备管理、路径规划、电子围栏、越界报警等各个功能子菜单进行了模块话开发设计,行程整个平台管理软件的基础核心部分,并在此基础上对各个外围功能进行设计开发,如图4所示。

图4 软件界面
5 结语
研究北斗室外高精度定位算法,针对高精度卫星定位算法,完成了多星座高精度RTK算法模型,解决了多系统卫星定位在电力系统等复杂电磁环境下的高精度定位实现方案。另外,对于UWB 室内定位算法,完成了多种UWB 基站布设方案下的定位结果优化,在变电站等室内环境复杂、电磁设备多的情况下,采用UWB 定位的高精度算法模型,确定了室内UWB 定位基站的布站模式以及定位精度的实现方案。同时,针对卫星定位及UWB 两种定位模式算法原理的研究,提出了一种可兼容两种定位模式的厘米级高精度定位算法,在该算法下可以实现两种定位模式的无缝切换,不影响最终定位结果精度。利用北斗室内外无缝定位技术,结合人工智能、三维电子围栏和物联网技术,建设基于北斗技术的室内外无缝定位导航系统,可对人员作业路径规划、危险区告警、权限管控、行为规范管控和历史责任追踪等功能为一体的室内外电子围栏和安全管控平台,利用巡检人员的可穿戴设备对潜在危险进行预警。以该套系统为基础设施,可方便扩展其他基于室内外融合定位的定位与导航应用场景。