水果采收运一体化装置的研究与设计
2022-01-10李金彦
李金彦
(宁夏工商职业技术学院,宁夏 银川 750021)
0 引言
果实的高效采收是当前林果业的重要课题之一。长期以来,果实的采收主要依靠人工作业,随着人力成本的上升,大规模人工作业正逐步制约林果业的发展。因此,研制水果采收机械,具有非常重要的现实意义[1-2]。水果采收机械,一方面可减少天气因素对采摘作业的影响;另一方面可有效降低人工成本,提升农业生产力。目前,国内外学者对这方面进行了研究,主要集中在采摘、收集或输运等某一个环节,缺乏对整体作业的操控,功能单一、载荷有限、自动化程度不高,且对果实的损伤较大。本文通过对采收作业环境和作业对象的分析,研制采摘、收集和输运一体化机械,可有效降低果实损伤率,提高采收效率,节省人工成本,提高果农经济效益[3]。本文设计的水果采收机械装置主要用于果类采收运一体化作业,可爬坡、越埂,广泛适用于平原、山区、丘陵、温室等区域种植的果类采摘收获。
1 整体设计思路
水果采收作业环境复杂,环境的不完整性和不确定性导致了采收机械设计的复杂性。采收现场可能有田埂、沟坎、树枝或其他障碍物,因此需设计多自由度承载式自走车体,搭载全部采收设备、操作人员、驾驶人员、果实、果箱等,这就要求采收机械要有较大的功率和转矩,因此选用大功率柴油发动机提供动力来源,保证机器在极端工况下仍能正常作业。针对采摘机械要实现对果实的识别、定位和抓取作业问题,构建空间坐标系,配合计算机视觉系统,完成对果实的智能定位和抓取。针对果实采摘需要及时收集,并在收集过程中防止相互碰撞导致损伤问题,设计果实收集装置。最后设计果实输送装置,将采摘的果实进行输送和装箱作业,以完成装、收、运一体化作业。总体设计思路是运用三维设计软件Solidworks 完成整机各零部件的三维建模,设计采摘机械手臂、果实收集装置、果实输送装置、机车行走装置与升降装置,装置均通过相对独立的动力源提供动力,以确保机器工作的稳定性。具体工作包括采摘装置车体本体设计,传动机构的选择方案及大小设计,采摘机主要零部件的设计,输送机构的设计与选型,各零部件尺寸参数计算,分模块完成各个工作部分的装配模型,并生成三维立体总装模型,应用仿真软件模拟各部件运动以确保证机器的安全性能,观察效果并加以改进,确保最终设计的装置能够实现果实采摘、收集、输运一体化作业。
2 机械结构设计
2.1 切割机构设计
本装置中切割机构的作用是对果实进行采摘,以便后续收集机构对水果进行收集。水果采摘机械主要有振摇式、撞击式和切割式3 种类型[4],摇振式和撞击式对水果损伤较大,本文选用对果树和果实损伤较小的切割式采摘类型。以剪刀的结构作为参照,并结合四杆机构运动原理,设计剪刀大臂和小臂。在剪刀的基础上对其两端各增加一段连接片与固定板进行连接。采用小型直流电机带动丝杆,推动推杆运动。电动推杆作为执行元件,其直线运动带动剪刀小臂运动,控制剪刀的大臂开合。电动推杆与剪刀在其两剪切片连接处进行连接,通过把手处的控制开关控制电动推杆进行伸缩来带动剪刀对果实果梗进行剪切,以此实现对果实的采摘过程,切割机构原理图如图1 所示。

图1 切割机构
2.2 伸缩杆机构
伸缩杆机构主要用来连接采摘机械臂底座和采摘机械手,当升缩杆伸缩时,可调整采摘机械手的位移空间,以便机械手采摘不同坐标空间内的水果。伸缩杆机构由3 段支撑杆组成,外加导向槽固定,其具体结构如图2 所示,上支撑杆和中支撑杆分别可通过调整螺栓螺母的松紧来固定邻近的支撑杆。3段支撑杆的长度均为500 mm,通过上、中支撑杆的螺栓螺母调节松紧,可以调整水果采摘机的整体长度为1.5~2.0 m。

图2 伸缩杆机构
2.3 收集机构方案
收集机构由连接盖、缓冲网和收集盆组成,收集机构见图3。连接盖和缓冲网连接一起,连接盖通过螺栓螺母固定于伸缩杆上,缓冲网底部有1 个直径为70 mm 的出口,缓冲网下端为收集盆,收集盆与支撑杆和手把进行连接固定。经由切割机构剪切掉落下来的水果进入到缓冲网中进行减速,然后以缓慢的速度进入到收集盆中,实现对水果的收集。缓冲网底部设计通口且接有收集盒,对掉入缓冲网的水果进行缓冲减速并使水果以缓慢的速度进入到收集盒中,由于单次仅收集1 个水果,可以避免对水果造成砸伤损坏,降低损伤率。
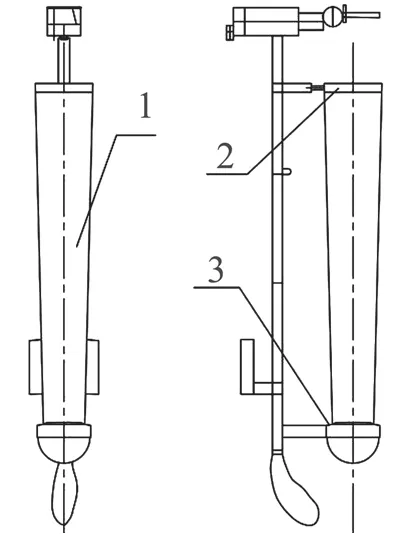
图3 收集机构
2.4 采摘机械手的设计
水果采摘机械手设计的核心是要保证对水果的损伤率降到最低,难点在于机械手造型设计,利用仿生学原理,模拟人手对果实的抓取方式和移动方式,设计机械手。机械手采用3 个手指的连杆机构,手指内测均贴有力学传感器应变片,传感器实时检测手指对水果的抓握力,向计算机控制中心实时反馈接触果实部位受力变化,计算机实时计算判断并控制机械手舒张量,以调整抓握力的大小,降低果实损伤率。基于大多数成熟水果直径一般为70 mm[5],因此,所设计机械手的抓取范围在直径60~100 mm 之间,以确保可以抓取绝大多数成熟水果,机械手的设计效果图如图4 所示。
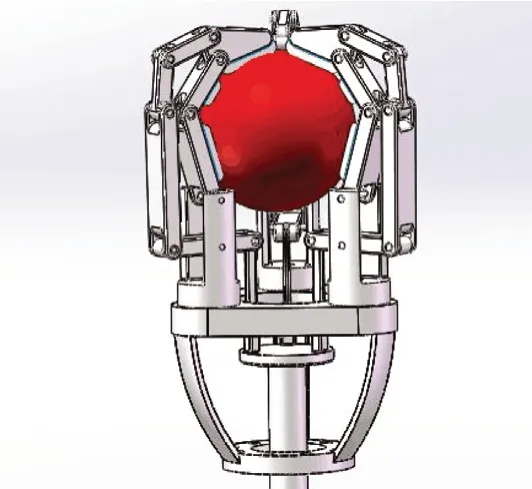
图4 机械手设计效果图
2.5 行走机构的设计
为保证采收机车具有较好的自由度和田间作业,设计机车行走机构。机车行走机构主要考虑能够实时控制机车前进、后退以及运动速度,因此行走机构要保证足够的强度和刚度。机车前进、后退和速度主要由电控液压系统控制,通过计算机监控,处理远端传感器反馈的数据信号,形成闭环控制系统,及时判断,发送动作指令。前轮通过液压方向操作舵、液压调速装置,控制转向以及机车移动速度。前轮由球面电动液压操舵,在保证功率和扭矩的情况下,最低燃油消耗工况下的慢速度为0~1 km/h,快速度为0.3~4.0 km/h,前轮行走机构如图5 所示。
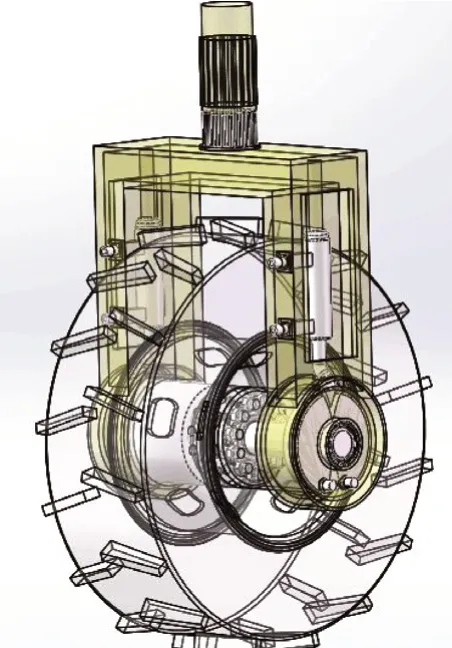
图5 前轮行走机构
2.6 总体结构简图
水果采收一体化装置包括采摘动力部分、行走机构、传输部件和采收装置,其中动力部分包括柴油发动机、直线电机,行走机构包括机车机架、车轮、转向液压缸等,传输部件包括齿轮箱、皮带、机械滑台等,采收装置包括机械手、水果导流槽、装框输送机构等,采收一体化装置的总体结构简图如图6 所示。
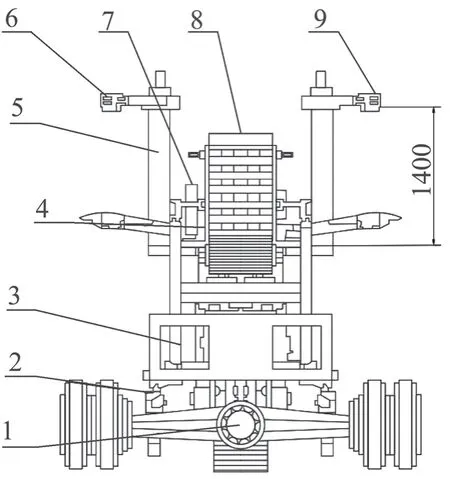
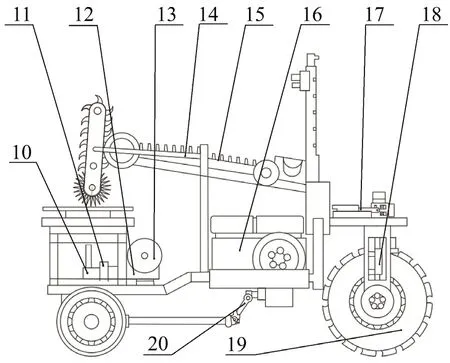
图6 水果采摘机的总体结构简图
2.7 装置工作流程
采摘机械手接收控制中心信号,以计算机视觉为基础,识别并判断成熟果实并进行三维坐标计算和定位,合理规划机械手运动轨迹,机械手在预定轨迹上运动至目标水果,对目标水果抓取固定,切割机构对水果果梗进行切割,实现采摘手采摘水果,并将采摘到的果实放置在导流槽内,导流槽采用摩擦力较大的粗厚橡胶织物,以减缓水果运动速度,进入输送装置,经提升到达装筐输送机构,承接板承接水果使其落于毛刷上再进入果筐,实现轻柔装筐,降低损伤率。
3 动力传输设计与计算
3.1 动力传输的实现
本装置机构动力传输主要依靠异步步进电机实现,丝杆滑台由一台小功率直线步进电机,机械手抓取与舒张由丝杆直线步进电机通过牵动丝杆套沿轴向往复运动驱动机械手手指握紧与舒张。
3.2 电机的选择计算
预设负载质量M=50 kg,螺杆螺距PB=20 mm,螺杆直径DB=20 mm,螺杆质量M=40 kg,摩擦系数μ=0.2,机械效率η=0.9,负载移动速度υ=30 m/min,加速减速时间t1=t3=0.2 s。
1)电机轴上的总负载惯量
电机轴上的总负载惯量JL为电机轴上的转动惯量JW与螺杆转动惯量JB之和。

2)电机转速N

3)电机驱动负载所需要的转矩Tf

加速所需总转矩TA为重物加速时所需转矩TA1与螺杆加速时所需要转矩TA2之和
4)选择伺服电机
伺服电机的额定扭矩T>Tf且最大扭矩TMAX>Tf+TA。
3.3 输送机构传动设计
水果采收机械输送机构包括装筐旋转机构和液压系统,其中旋转机构可实现360°转向,用于对果实的装框,液压系统主要用于驱动旋转机构,其动力通过带轮与皮带传动实现,输送带可实现顺时针/逆时针转动,如图7 所示。

图7 输送机构传动示意图
3.4 电动推杆选型
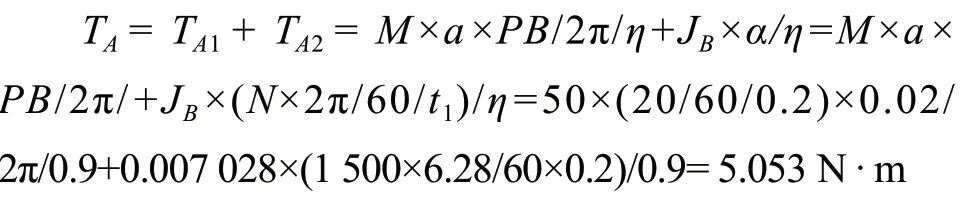
通过对切割机构的设计,对剪刀剪切水果树枝时的受力分析如图8 所示,其中O点为两剪切片的交点和电动推杆推力的受力点,A、B为水果果梗的切割点,AO和BO为2 个剪切片分别到切割点的距离,AO=BO,α为剪刀的张角。通过对剪刀进行设计,取AO=BO=70 mm,圆AB直径为5 mm,F为电动推杆对剪刀的推力,O为受力点。
图8 切割受力分析
由AO=50 mm,AB=5 mm,则

解得α=5.74°,则查阅相关资料,预设剪刀剪断水果树枝所需的力为20 N,即FAy=FBy=10 N,则电动推杆的推力至少为

查阅手册,选取安全系数为S=2,则电动推杆理论拉力应为

通过对剪刀的工况分析,电动推杆的最小行程为15 mm,由电动推杆所需拉力和最小行程,对电动推杆进行选型,选取型号为XTL100,具体参数见表1 所示。

表1 电动推杆参数表
由表1 可知,电动推杆的最大行程为50 mm,由于电动推杆可以在任意位置停止,且需要考虑电动推杆的安装位置,因此所选的电动推杆大于原定最小行程15 mm,小于最大行程50 mm 即可,即所选取的电动推杆的型号满足使用要求。
3.5 输送装置的选择
带式输送机的倾角一般小于18°[6],本设计采用纵向输送带,不需要很大的提升角,提升工作强度不大,故而设定输送带倾角为10°,输送带长1.5 m,宽0.6 m,前端与导流槽吻接,带式输送机如图9 所示。
图9 带式输送机
3.6 装筐输送机构
装筐输送机构与纵向输送带转向相反,实现水果自动均匀装筐,毛刷设计引导水果轻柔装筐,减少装筐损伤。
4 总体示意图
本采收装置总体效果如图10 所示。包括采摘部件,收集部件和输送部件,都共同安装于采摘车体上。车体为三轮结构,其中前轮主要做转向作用,后轮起支撑和动力提供作用。

图10 采摘机械总体效果图
5 结语
本设计采用运动合成原理,简化机械手臂的设计,降低机械手臂设计难度,在机械设计中进行相关动力参数的计算和运动部件的选型。本文设计的采收运一体化装置,可基本实现水果的机械化采摘、收集、输送、装筐等,果实损伤率较低,有利于提高林果业采摘效率,降低人工成本,具有一定的适用性和推广性。
