任意相对阶下非线性切换系统的事件触发漏斗控制
2022-01-08龙离军王凤兰
龙离军, 王凤兰
(东北大学信息科学与工程学院,辽宁沈阳 110819)
1 引言
近十年来,随着数字电子技术的快速发展,数据采样控制受到越来越多学者的关注.传统上,控制系统组件之间的信息传输大多是利用周期采样(时间触发)的方式进行的,这往往会造成不必要的采样和数据传输.值得指出的是,事件触发控制被提出和发展[1-2].与传统的时间触发控制相比,事件触发控制中的采样/执行是由对应系统行为的特定“事件”触发的.而设计者可以根据实际需求来设计这些“事件”发生的条件,即系统根据触发条件来决定是否进行状态或者输出的采样以及控制器的更新.文献[1]已经指出,相比于传统的周期采样方式,事件触发控制可以大大节约计算和通信资源.针对非线性系统,不同的事件触发机制已经出现[2-3].
另一方面,作为一类特殊的混杂系统,切换系统由一系列子系统和决定子系统切换的切换信号组成.切换系统有其广泛的应用背景,比如机械系统、电力系统、化学反应釜等均可建模为切换系统[4-6].相应地,各种控制问题均得到了广泛研究[4,7-8].特别地,关于非线性切换系统的跟踪控制已得到广泛关注[6,9].然而,上述方法不能控制跟踪误差的暂态性能.幸运地,文献[10]提出了漏斗控制方法.通过利用漏斗控制技术,可以保证跟踪误差一直在预设的漏斗内演化,由此来控制跟踪误差的暂态性能[10-11].然而,这些漏斗控制方法都是仅针对非切换系统而言的,并且是在连续时间反馈的框架下建立的,因此,这些方法不能直接应用到数字平台上.鉴于此,研究非线性切换系统的事件触发漏斗控制是有理论和实际意义的.
近年来,关于切换系统的事件触发控制成果不断出现.例如,文献[12-14]研究了线性切换系统的事件触发控制问题.针对非线性切换系统,自适应事件触发控制问题也得到研究[15-19].然而,文献[15-16]仅为所有子系统设计了共同的控制器,绕开了异步切换问题.文献[19]处理了异步切换问题,但没有考虑跟踪误差的暂态性能.此外,文献[15-17,19]并未考虑带有非输入到状态稳定(input-to-state stability,ISS)逆动态非线性切换系统的情况.事实上,据笔者所知,到目前为止,关于如何处理任意相对阶且带有非ISS逆动态的非线性切换系统的事件触发漏斗控制问题还鲜有报道.这主要是因为,在非线性切换系统的事件触发漏斗控制的研究中,由于子系统切换,事件触发和跟踪误差受限的相互影响,如何处理子系统控制器与子系统之间的异步切换问题,保证跟踪误差一直在预设的漏斗内演化,以及通过克服子系统切换可能导致触发的困难以排除采样中的奇诺现象都是具有挑战性的问题.
基于上述的讨论,本文针对一类具有任意相对阶且带有部分非ISS逆动态的非线性切换系统,研究事件触发漏斗跟踪控制问题.相比于现有的结果,本文的主要特点如下:1)首次研究具有任意相对阶且带有部分非ISS逆动态的非线性切换系统的事件触发漏斗控制问题;2)通过设计各子系统的事件触发漏斗控制器和切换的动态事件触发机制,有效地处理异步切换问题.所提出的方法消除文献[15-16]中设计共同控制器带来的保守性;3)不同于文献[15-19],本文通过引入一类具有平均驻留时间的切换信号,保证带有部分非ISS逆动态的非线性切换系统的事件触发漏斗控制问题的可解性.确保跟踪误差一直在预设的漏斗内演化,并避免采样中的奇诺现象.
注1在本文中,Rn表示n维欧氏空间,R为实数集,R≥0是非负实数集,R+表示正实数集,非负整数集表示为N.|·|和‖·‖分别表示绝对值和欧氏范数.如果一个连续的函数α:R+→R+是严格递增的,并且满足α(0)=0,则它被称作类K函数.如果α是无界的,则是类K∞函数.ħ(R≥0,R+)表示一类有界函数,其导数也是有界的.λmin(∗)表示矩阵∗的最小特征值.如果存在正常数˜r和˜c,使得|˜δ1(˜a)|≤˜r|˜δ2(˜a)|,∀|˜a|<˜c,则˜δ1(˜a)=O(˜δ2(˜a)).
2 问题描述与预备知识
2.1 系统描述
考虑如下一类非线性切换系统:
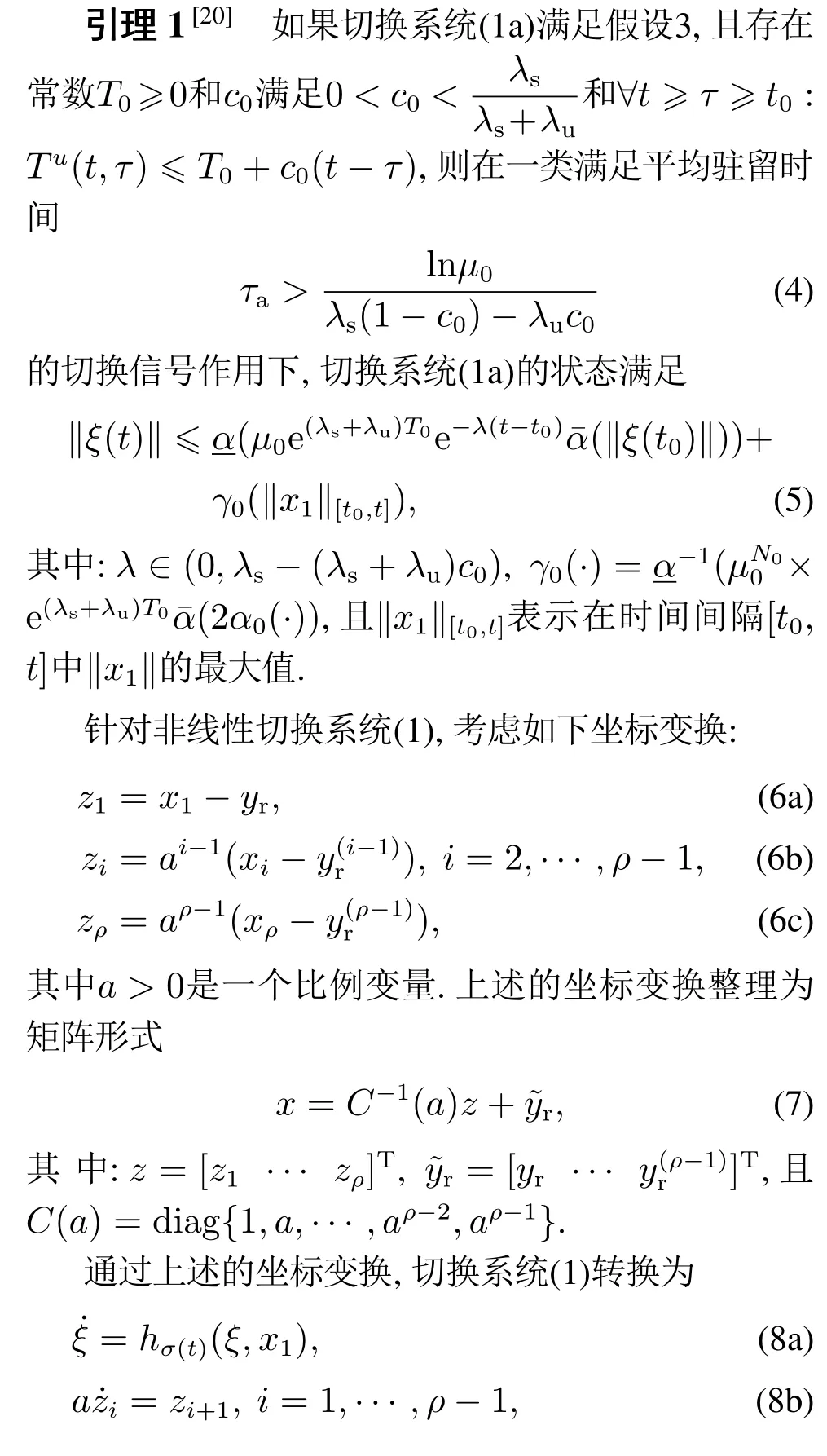
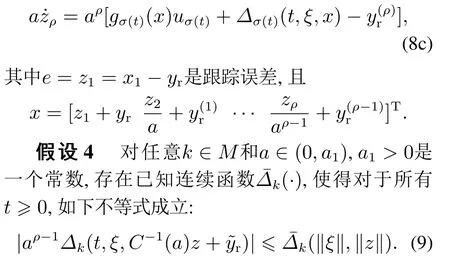
其中:ξ ∈Rn−ρ,x=[x1x2··· xρ]T∈Rρ是系统的状态;σ(t):R+→M={1,2,··· ,m}是一个分段右连续的常值函数,称之为切换信号;对应于每个k ∈M,uk是第k个子系统的事件触发控制输入;y为系统的输出;hk和gk是局部李普希茨函数;Δk是关于(ξ,x)局部李普希茨的,关于t分段连续且有界的函数.记{tp,p ∈N},tp 控制目标:针对非线性切换系统(1),给定参考信号yr(t),通过设计各子系统的事件触发漏斗控制器和合适的事件触发机制,保证切换闭环系统的所有信号在一类平均驻留时间切换信号作用下是有界的,跟踪误差y(t)−yr(t)一直保持在预设的性能漏斗里演化.同时,避免采样中的奇诺现象. 为了实现上述控制目标,给出几个假设,定义和引理. 注2在切换系统或非切换系统的跟踪控制研究中,假设1是常见的.假设2表明gk(x)̸=0, ∀t≥0.不失一般性,进一步假定gk(x)≥g.根据假设3,容易看出非线性切换系统(1)可以带有部分非ISS的逆动态(1a),其中,Ms表示对x1是ISS的子系统的集合,Mu表示对x1是非ISS的子系统的集合.不同于现有的关于非线性切换系统的事件触发控制的文献[15-19],它们都未考虑非线性切换系统可以带有非ISS逆动态,本文提出的方法可以解决带有部分非ISS逆动态的非线性切换系统的事件触发漏斗控制问题. 为简便起见,对任意时间间隔[τ,t),t0≤τ≤t,记Tu(t,τ)为属于集合Mu的子系统在时间区间[τ,t)中被激活的总时间,Ts(t,τ)为属于集合Ms的子系统在时间区间[τ,t)中被激活的总时间,则有Ts(t,τ)+Tu(t,τ)=t −τ. 定义1[4]对任意的切换信号σ(t),如果存在两个正数N0和τa,使得 其中:Nσ(T,t)表示在时间间隔[t,T)内切换的次数,N0是抖动界.则称切换信号σ(t)具有平均驻留时间τa. 注3基于假设4,文献[11]研究了非线性非切换系统的漏斗控制,但提出的方法不能直接扩展去解决带有非ISS逆动态的非线性切换系统的事件触发漏斗控制问题.主要原因是由于子系统切换和事件触发的交互作用造成的异步切换和采样中奇诺现象的排除是两个急需解决的挑战性问题. 为了控制跟踪误差的暂态行为,漏斗控制被提出[10].漏斗控制是通过利用系统的高增益性质来保证跟踪误差在预设的性能漏斗里演化.图1描述跟踪误差在预设性能漏斗里演化的过程.根据文献[11],性能漏斗描述为 图1 性能漏斗FφFig.1 Performance funnel Fφ 显然,如果跟踪误差的绝对值|e|靠近漏斗边界ψ,控制增益Γ(t)将增大,反之,如果跟踪误差的绝对值|e|远离漏斗边界ψ,控制增益Γ(t)将减小. 在本节中,为了求解带有部分非ISS逆动态的非线性切换系统(1)的事件触发漏斗控制问题,首先给出各子系统的事件触发漏斗控制器和切换的动态事件触发机制的设计过程,然后给出切换闭环系统的稳定性分析. 为了充分利用计算和通信资源,本文将为切换系统(1)设计各子系统的事件触发漏斗控制器.为了设计各子系统的事件触发漏斗控制器,首先,注意切换系统(8)关于e的相对阶为ρ.接下来通过引入一个虚拟输出ϑ,将相对阶为ρ的系统转换为关于虚拟输出是相对阶为1的系统.根据文献[11],设计虚拟输出ϑ为 其中:δk是正常数,ˆv是辅助输入.因此,事件触发漏斗控制器设计为 事实上,在非线性切换系统的事件触发漏斗控制研究中,当在任意连续的触发间隔内发生子系统切换时,候选子系统的控制器和子系统之间就会自然地发生异步切换.异步切换可能会降低切换系统性能,甚至造成切换系统的不稳定.在本文中,为了处理异步切换问题,一个切换的动态事件触发机制设计如下: 其中:˜eσ(t)是切换的采样误差,θ>0和r1k>0,k ∈M是设计常数,η(t)是内部动态变量,满足 其中r0>0是常数,且初值满足η(0)>0.联合式(17)-(19)和r0>0,r1k>0,k ∈M,并利用比较引理[21],容易得出对所有t≥0,有η(t)+θ(r1σ(t)−|˜eσ(t)(t)|)≥0和η(t)≥0.另外,式(19)表明˙η(t)≤−r0η(t)+ 首先,分析漏斗边界初值ψ(0)和跟踪误差初值的绝对值|e(0)|的差是严格正的等价于漏斗边界初值ψ(0)和虚拟输出初值的绝对值|ϑ(0)|的差是严格正的. 如果ϑ满足|ϑ|≤¯ψ,根据式(24),可知当‖¯zρ−1‖≥b¯ψ,˙V¯zρ−1是负定的.结合式(23),可知存在正常数b1,b2,使得集合{¯zρ−1∈Rρ−1|V¯zρ−1(¯zρ−1)≤b1¯ψ2}是系统(22b)的正不变集,且在该集合里z1满足|z1|≤b2¯ψ.那么,根据z1=x1−yr和假设1,可得状态x1满足 其中ψ0是一个常数,满足0<ψ0<ψ(0).接下来,针对切换系统(22),将会证明如果|ϑ(0)|<ψ(0),则在一类切换信号具有平均驻留时间τa满足式(4)下,可得对于所有t≥0,|ϑ(t)|≤¯ψ.借助于式(24)-(27)之间的分析,可得对于所有t≥0,有(ξ,¯zρ−1,ϑ)∈Ξ1成立. 如果|ϑ(0)|≤ψ0,结合ψ0<ψ(0),可知ϑ(0)和漏斗边界函数的初值有一个严格正的距离,即存在一个正常数ς,使得 式(32)表明跟踪误差初值的绝对值|e(0)|和漏斗边界函数的初值ψ(0)有严格正的距离.因此,结合式(29)-(32)之间的分析,可知漏斗边界函数的初值ψ(0)和虚拟输出初值的绝对值|ϑ(0)|的差是严格正的等价于漏斗边界函数的初值ψ(0)和跟踪误差初值的绝对值|e(0)|的差是严格正的. 主要结果如下: 定理1 在假设1-4下,考虑由切换系统(22),事件触发漏斗控制器(16)和切换的动态事件触发机制(17)-(18)组成的切换闭环系统,如果选择正常数λ2,··· ,λρ使得矩阵A是赫尔维茨的,预设的漏斗函数φ(t)满足φ(t)∈Ψ,且系统初始条件满足(ξ(0),¯zρ−1(0),ϑ(0))∈Ξ0,则在一类平均驻留时间τa满足式(4)的切换信号作用下,保证切换闭环系统具有如下的性质: 1) 对于所有t≥0,切换闭环系统的所有信号都是有界的,且存在正常数ds使得 因此,可知ϑ(t)一直在性能漏斗里演化,并且辅助输入v(t)是有界的. 2) 存在˜a使得对于每个a ∈(0,˜a],有 3)采样中的奇诺现象可以避免. 证 对应于上述的3个性质1)-3),定理1的证明也将分为下面的I)-III)3个部分给出. 因此,ϑ(t)是有界的.那么,结合式(23)-(28)之间的分析,可得在一类平均驻留时间τa满足式(4)的切换信号作用下,对于所有t ∈[0,ˆst),有(ξ,¯zρ−1,ϑ)∈Ξ1成立,即系统的轨迹都是有界的.这个结果和解的最大延拓性矛盾,因此可有ˆst=∞.那么,可得 那么,结合上述i)-iii)的分析,容易得出在切换闭环系统中,触发时刻序列不会有聚点产生,因此,采样中不会出现奇诺现象.证毕. 注4不同于现有的关于非线性切换系统的事件触发控制方法[15-16],它们仅为所有子系统设计了一个共同的控制器,本文为了降低共同控制器设计带来的保守性,设计了各个子系统的事件触发漏斗控制器(16)和切换的动态事件触发机制(18)-(19),直接解决了异步切换问题.另外,不同于文献[15-19],本文考虑的非线性切换系统(1)可以带有部分非ISS逆动态,同时,提出的方法可以保证跟踪误差一直在预设的性能漏斗内演化. 为了验证本文提出的动态事件触发漏斗控制方法的实用性和有效性,本节给出一个双倒立摆系统. 例1 考虑由弹簧连接的双倒立摆系统的切换控制,如图2所示.根据文献[22],双倒立摆控制系统的动力学模型描述为 图2 弹簧连接的双倒立摆Fig.2 Two inverted pendulums connected by a spring 应用到系统(72),则系统(72)可以重写为非线性切换系统的形式 其中: 参考信号满足yr=1.3 sint.考虑性能漏斗的倒数ψ(t)为 图3 例1的系统状态ξ1,ξ2,x1,x2及子系统和实际控制器的切换信号σ(t),σ(tej)Fig.3 System states ξ1,ξ2,x1,x2, and switching signals of subsystem and actual controllers σ(t), σ(tej) in Example 1 图4 例1的跟踪误差e,虚拟输出ϑ及性能漏斗上界ψ和下界−ψFig.4 Tracking error e,virtual output ϑ,the upper bound ψ and lower bound −ψ of performance funnel in Example 1 图5 例1的事件间时间及|e˜σ(t)(t)|和+r1σ(t)的轨迹Fig.5 Inter-event times, trajectories of |˜eσ(t)(t)| and+r1σ(t) in Example 1 本文解决了具有任意相对阶且带有部分非ISS逆动态的非线性切换系统的动态事件触发漏斗跟踪控制问题.先通过引入一个虚拟输出,将任意相对阶的切换系统转化为相对阶为一的系统.再设计了各子系统的事件触发漏斗控制器和切换的动态事件触发机制,在一类具有平均驻留时间的切换信号下,保证了跟踪误差一直在预设的性能漏斗内演化,且所有状态是有界的,采样中的奇诺现象同时被避免.最后,仿真结果验证了该方法的实用性和有效性. 事实上,当控制器和执行器之间的信息传输中存在网络时延时,如何求解非线性切换系统的事件触发漏斗控制问题还有待解决.

2.2 漏斗控制



3 主要结果
3.1 事件触发漏斗控制器设计





3.2 稳定性分析












4 仿真示例









5 结论
猜你喜欢
杂志排行

控制理论与应用的其它文章
- 基于扩展状态观测器的随机隐Markov正跳变系统有限时间异步控制
- 矩阵方程的分布式求解算法研究概述
- Average cost Markov decision processes with countable state spaces
- 基于输出反馈和滑模控制的一类二阶非线性系统有限时间镇定方法
- Enhanced active learning for model-based predictive control with safety guarantees
- State-flipped control and Q-learning algorithm for the stabilization of Boolean control networks