基于多旋翼无人机平台的高性能电力综合巡检系统设计
2022-01-06杨少宾
李 宁,李 波,陈 炜,康 瑞,杨少宾
(国网宁夏电力有限公司检修公司,宁夏银川 750011)
近年来,我国的电网建设取得了迅速的发展。从特高压输电到主动配电网均获得了较大的发展,也逐渐改变了能源的供应方式,提升了能源的供应效率[1]。但日益扩大的电网规模需要花费更多的人力、物力去维护,由此也产生了较高的运维检修费用;同时由于大部分的输电线路和高压变电站地理分布较为复杂,通常需要穿越高山、冰区及无人区等[2]。这不仅增加了运维检修成本,且存在较大的安全隐患。因此,利用无人机进行电力巡检成为一种可靠的解决方案。在近年来,随着无人机技术与性能的不断提升,极大地减少了电力设备巡检的工作量和危险性[3-5]。
目前,国内外学者针对无人机电力设备巡检系统和硬件均作了较大的改进。文献[6]对无人机的电力线路巡检中关键技术作了全面的论述;文献[7]对微型四旋翼无人机在电力巡检中的应用开发了较灵活、实用的系统。国外由于巡检系统结构已较为完善,其研究主要集中于提升无人机的续航能力[8]、操作灵活性[9]以及图像识别[10]等方面,旨在开发出一种高性能、准确度高的无人机电力巡检软硬件平台。
综上所述,虽然无人机电力巡检已被应用于电力系统的设备巡检中。但受制于无人机的性能和续航能力、图像识别、数据处理的准确性等,尚存在较多可提升的方面,具有较大的研究潜力及意义。
1 无人机巡检系统结构和功能
1.1 整体方案
典型的无人机巡检系统主要分为5 个部分[11],包括无人机本体、导航、跟踪、云平台及地面信息平台。其主要构成与联系如图1 所示。
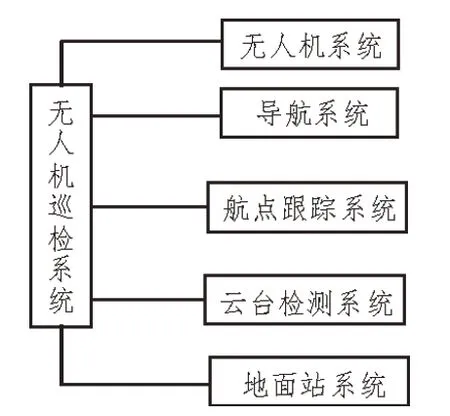
图1 无人机巡检系统构成
无人机巡检系统中的无人机系统是电力巡检的主要载体,也是最重要的部分,保障无人机系统的安全、可靠运行是通过无人机进行电力巡检的基础。无人机系统主要是指无人机内部的控制系统,用于自平衡、自动调整飞行角度、故障保护等。导航系统作为无人机电力巡检平台的定位手段,借助GPS[12]和北斗卫星定位系统[13]可以较准确地定位无人机的位置。同时通过云平台返回其方位和所拍摄图形的位置,以便巡检人员判断无人机与电力设备所在的具体位置。航点跟踪系统作为无人机失灵时的保护系统,在目前无人机可靠性有限的情况下具有较重要的作用。云平台系统和地面信息系统是处理无人机拍摄成果的主要渠道,无人机将拍摄的图片、视频、地理位置等其他信息上传至云平台,进而传输至地面信息处理站点。地面信息处理站通过图像识别或人为判断,可以判断该处电力设备的运行状态。地面信息系统可同时向无人机发送控制指令,方便操作人员更全面地查看某电力设备[14]。
1.2 四旋翼无人机本体设计
四旋翼无人机是无人机电力巡检最关键的设备,其飞机本体上搭载有通信设备和飞行控制系统。其中飞行控制系统是无人机系统的核心,关系着无人机飞行的稳定性和控制的灵活性[15]。
飞行控制系统应具备的功能有:
1)在不同的环境因素(温度、风速)下保持飞行器的稳定性;
2)根据操作员的指令调整飞行;
3)与地面信息站和云平台进行信息交换与传递;
4)具备一定的二次开发功能。
1.3 定位设计
无人机巡检系统的定位设计主要是通过测量飞行器所处位置,利用组合定位技术对多种物体进行测量,进而根据测量值之间的比较,得出相对误差并修正参数。位置信息可分为GPS 数据和INS 数据。在这一问题上,卡尔曼滤波法通常被认为是较好的解决方式。
结合卡尔曼滤波,通过GPS、INS 的位置信息探测结果,得到相对准确的定位信息。其具体原理如图2 所示。

图2 差分GPS/INS组合定位原理
2 系统软硬件环境搭建
2.1 Onboard系统设计
Onboard[16]系统由传感、计算及通信等设备组成,该系统具有丰富、全面的功能,包含较多的飞行模式选择、飞行数据获取和自主巡航等能力,而且具备二次开发性。其具体构成关系如图3 所示。
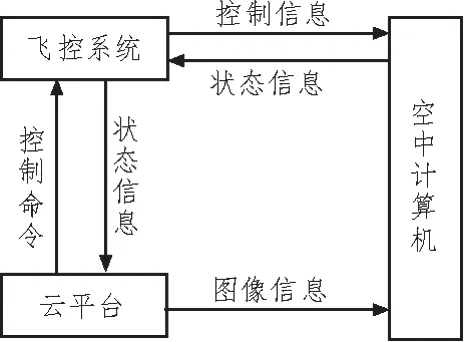
图3 云平台检测系统
其软件实现过程和命令的过程如下:
1)无人机飞行状态与云平台控制;
2)无人机搭载相机拍摄图像指令控制;
3)无人机搭载相机拍摄视频指令控制;
4)设备与云平台数据交换控制;
5)无人机飞行路径控制(圆弧或矩形);
6)获取无人机各个系统的详细数据。
2.2 硬件环境
定位基站的发送信号与接收信号分布在不同的模块,其通过串口与云平台进行数据传输,然后通过信息传送设备将图像、视频等传输至地面信息站。
3 多旋翼无人机控制算法及改进
3.1 航线控制算法
无人机航线控制算法主要由系统巡检平台搭载和实现。对于激光雷达无人机采集的高精度数据和关键点,比如杆塔周围、线路沿线及变压器等,铁塔一般需要根据其线路回数取不同的采集点。无人机主要悬浮位置如图4 所示。
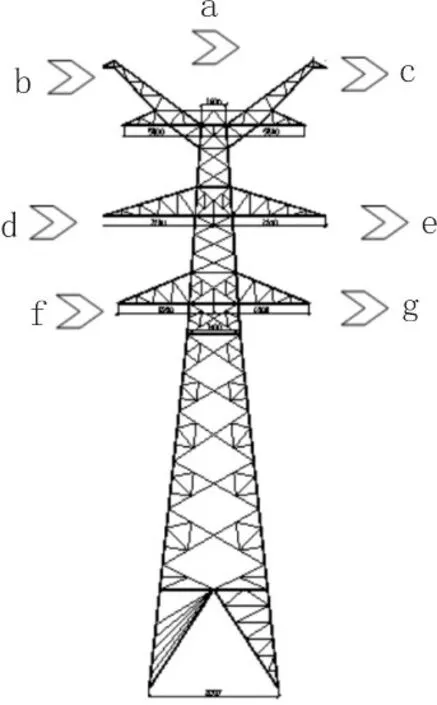
图4 无人机巡检主要悬浮位置
根据巡检需要,无人机的巡检路线和停留悬浮关键点需满足式(1)的要求:

式(1)中,y1、y2分别为在一定的磁场干扰下,无人机保持既定路线的距离。实际使用中,需要根据式(1)与不同的应用场景综合制定关键点的采集位置,由此得出无人机的最优巡检、悬浮路线,保证四旋翼无人机的稳定、高效工作。
3.2 图像识别处理
图像的信息识别是各行各业开展无人工作的研究重点,识别信息的准确性直接决定了所采集信息是否能够被使用。该文基于四旋翼无人机的高性能电力综合巡检平台,采用卷积神经网络作为图像识别的方法。该方法结合梯度下降算法进行训练,且需要收集大量的原始数据进行训练、提取特征和分类。收集数据输入至卷积神经网络的系统中,最终形成合格的图形识别流程和模式,并对大量数据进行智能训练分析。
卷积神径网络原理如图5 所示。
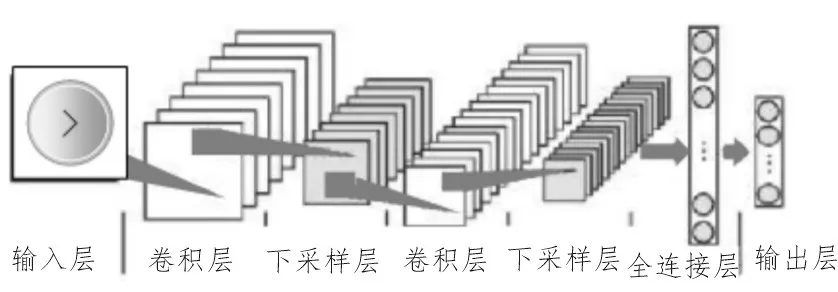
图5 卷积神经网络原理
卷积神经网络的输入输出关系如式(2)所示。

式(2)中,Wi为权值向量;f(·)为激励函数;Hi为特征图。
下采样层的主要功能一方面是对所采取的数据进行降维处理,另一方面需要保持关键特征值不变。假设Hi是下采样层,则:

卷积神经网络映射后的数学模型为:

式(4)中,W和b为可变参数。设η为残差控制传播强度,则有:
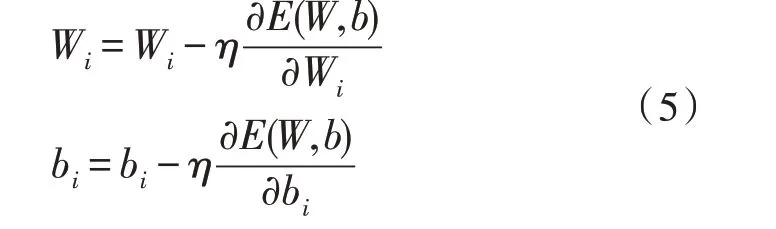
该文所建立的无人机巡检系统是基于上述卷积神经网络方法进行的。在多次的训练后,能够生成智能特征提取模型。在处理数据后,还需对数据进行校验和改正,整理误差数据并形成操作报告。这种做法正是在大量数据找规律的基础上进行的,显著提升了处理效率和准确性。
3.3 遥控距离增程
在无人机内部飞控主板引一条36 V 供电焊点,通过5 V 降压模块连接到2.3 W 的2.4/5.8 双频功率放大芯片。将两个信号接发端口与无人机原有端口连接,提升无人机收发信号的强度。具体结构如图6、图7 所示。
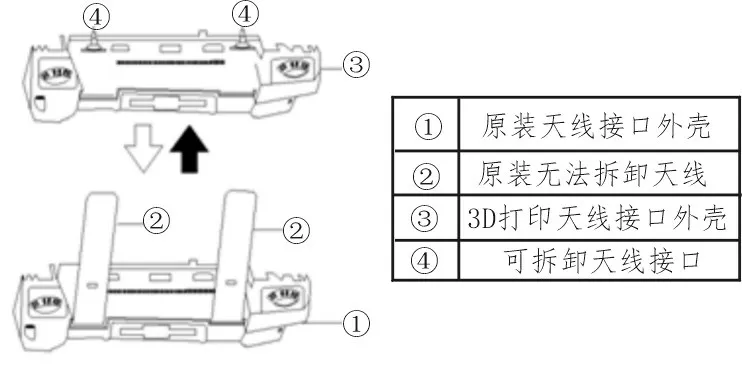
图6 天线接口示意图
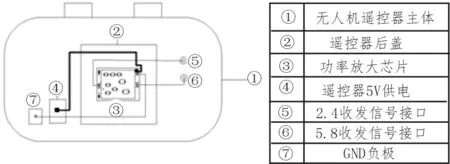
图7 无人机遥控器功率放大接线
3.4 电池续航
我国无人机电力巡检的主要瓶颈在于无人机的性能,比如无人机续航能力、飞行稳定性等因素。国内外目前正在开发石墨烯电池,但并未实现技术突破。氢燃料电池虽然续航能力强,但成本过高,而且稳定性、安全性和小型化等因素始终是阻碍民用无人机技术应用的重要原因。
该文以DJI Mavic 2 无人机为例,其采用智能锂聚合物电池,提高其续航能力的方案如下:
第一步,并联增容,使用EV2300 将无人机智能电池连接至PC 电脑USB 接口处。利用BQ30Z50 电池状态调参软件将无人机智能电池固件备份,以防电池锁住。
第二步,更改电机滤波器算法,将无人机拆解,找到电调与飞控连接焊点处。使用电烙铁将其拆解开,然后将兼容Betaflight-Configurator 软件的飞控重新焊接至电调上。将数据线的一端与飞控连接,另一端连接PC 的USB 接口。打开Betaflight-Configurator 软件,使用电机极数将ERPM 转换为RPM。RPM 滤波是一组36 陷波滤波器,用于陀螺仪和Dterm(可选)。Dterm 使用RPM 遥测数据,以预定精度去除电机噪声。以上操作完成后,通过飞控命令栏保存电调参数。
4 系统应用实践
根据上述原理,建立四旋翼无人机电力巡检平台并进行应用实践。测试所使用的无人机型号为大疆精灵Phantom 4 RTK,采用北斗卫星导航系统,测试对象为23 km 的同塔双回110 kV 线路。
实践结果表明,该高性能无人机平台显著提升了电力巡检的准确性和效率,减少了电力巡检尤其是输电线路巡检的危险性,保证了作业质量。详细作业指标参数对比如表1 所示。
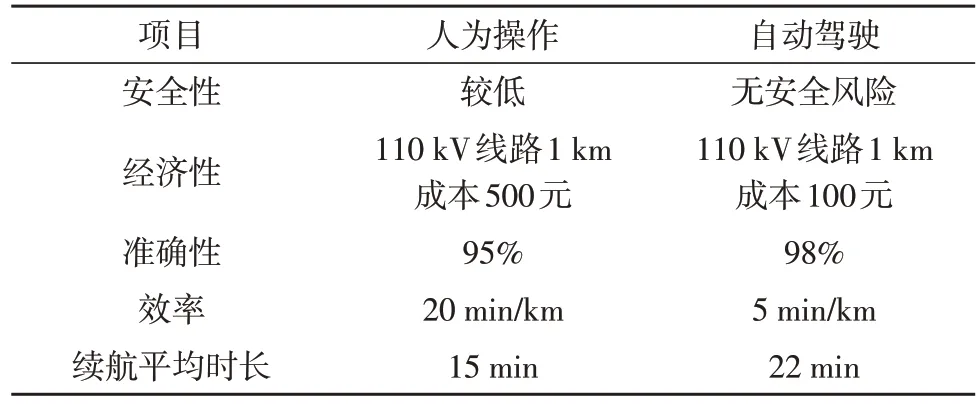
表1 作业关键指标参数对比
该文所述的高性能电力综合巡检系统大幅度提升了四旋翼无人机的续航里程和图形识别精度。在经济性方面,110 kV 线路1 km 成本从500 元降低至100 元;巡检线路故障准确性由95%提升至98%;工作效率由20 min/km 降低至5 min/km;续航平均时长由15 min 提升至22 min。在保证精度和提升效率的前提下,显著降低了电力巡检的经济性,并提升了电力巡检的安全性。
5 结束语
目前智能电网的发展较为迅速,研究者结合泛在电力物联网的概念,对电力设备的无人机自动巡检系统进行了大量的探索。作为实现智能化巡检的载体,对无人机高性能电力综合巡检平台的研究尤为重要。该文基于现有四旋翼无人机,对其续航能力和数据处理准确性进行了改进。结合无人机精确控制算法,使无人机能够自主捕捉观测关键点。结果表明,文中所建立的无人机高性能电力综合巡检系统平台能够对电力设备进行准确、高效的检测,且不存在安全风险。
