基于非对称理论的微观驾驶员行为特征分析
2022-01-06刘华磊谢振友林初染龙朝党
刘华磊,谢振友,林初染,龙朝党
(桂林电子科技大学,广西 桂林 541004)
0 前 言
近年来人们对交通行为的非对称性特征进行了研究,以解释微观交通流的不稳定性。即驾驶员在经历迟滞影响后的驾驶行为振荡和换道通常与以前不同。Yeo和Skabardonis分析了拥堵期间单个车辆的运动轨迹,发现了驾驶行为的异质性特征,但未研究操作不当和驾驶行为改变过程之间的关系。以及不对称性与驾驶类别之间的机理关系还不是很清楚。Laval和Leclercq将交通振荡的形成和传播建立了模型,并认为是由于驾驶员的激进或保守行为引起的。但是该模型中假设的行为模型仍缺少实例数据验证。Zheng等人利用小波变换方法对车辆轨迹进行分析,通过对换道行为的研究,展示了驾驶员的激进和保守驾驶行为特征。他们证明了换道会改变驾驶员行驶特征(改变可能是暂时的)。但是他们的主要是对驾驶员在换道时行为特征的比较,而且没有实证数据支撑研究车辆换道前后有不同驾驶员行为特征的分布。Chen等人通过分析NGSIM中的车辆轨迹,提出了一种非对称行为模型来捕捉拥挤交通条件下驾驶员的行为。该模型为研究非对称驾驶行为提供了一种很好的方法。但是他们只关注振荡前驾驶员特性的分布,而没有实证数据展示振荡后驾驶员特性的分布以及驾驶员特性变化的结果。盛鹏等人利用元胞自动机模型描述了不对称换道和瓶颈抢道行为产生的复杂交通现象。
国内外研究普遍认为换道行为驾驶员的行为特征会诱发扰动和促使拥堵波传播,即驾驶员的行为特征会影响交通流,而交通流状态的改变同样会对驾驶员的驾驶行为造成影响,但对于具体的关联性却没有一个统一的结论,仍然需要更多的研究来证实。
基于Chen等人的非对称理论,研究了换道前后驾驶员特征的分布和变化不同,以及其转化过程,从换道行为方面分析了振荡时驾驶员特征的非均匀分布和反应模式。
1 数据来源及处理
本文的研究数据来源于www.seutraffic.com网站公开的数据集,研究对象是南京双桥门城市高架高速公路中的瓶颈路段。本文只研究图片下方的车道(虚线矩形内),这是一个入口匝道瓶颈,如图1所示。
图1 无人机视频上的一帧,研究的路段(黄色虚线框)和被识别跟踪车辆(红色虚线框)
数据采集上,本文使用无人机来拍摄视野更广、鸟瞰视野更通畅的空中视频。然后从视频中提取被测路段上所有车辆的轨迹数据,实现交通流的完整时空重构。采集到的视频是通过图像识别与跟踪技术进行轨迹提取,技术流程如图2所示。每个车辆样本包括瞬时加速度或减速度、速度、纵向和横向位置以及换道时的准确位置等信息,获得高准确率微观的车辆轨迹数据。
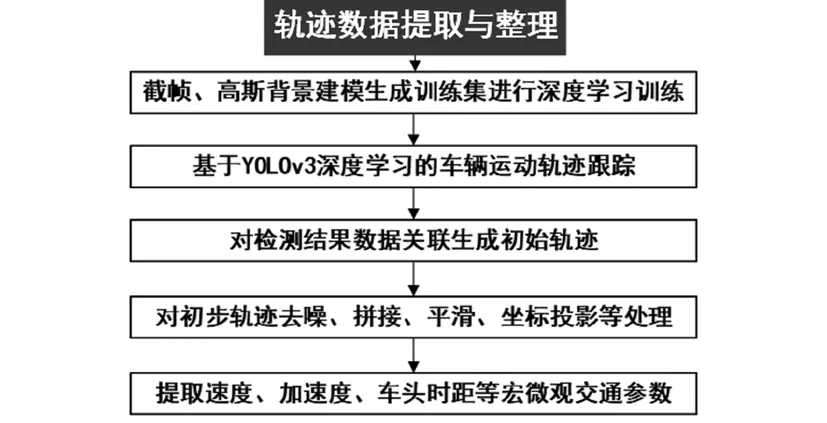
图2 图像识别与轨迹提取流程图
2 非对称模型基本原理


图3 振荡过程中的行为模式变化,即ηi(t)的演化

在非平衡前
(1)
在平衡时
(2)
平衡后
(3)
图4本文的数据中换道行为的数据实例,虚线表示不插入换道车辆的后车的理想轨迹,以及被换道车辆改变后的理论轨迹(τ,-τw)
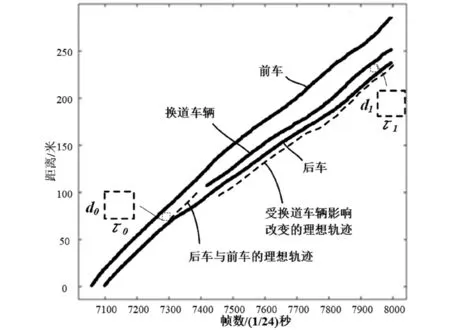
图4
3 研究分析与结果
以往研究的观察,换道过程通常持续5秒以上。利用NGSIM车辆轨迹,Zheng等人发现开始(t0~tT)和结束(tT~t1)过程的平均时间周期分别为8~14 s和10~15 s。
本研究的换道抽样标准为:前车和后车的轨迹时间周期大于40 s(>35 s,即开始和结束),换道车辆插入后的轨迹时间周期大于30 s(大于上述结束周期)。本文分析的一个经验换道样本如图4所示。总共分析了61组(每三辆车组成一组,即前车、换道车和后车)。


图5 后车驾驶员特征变化与平均驾驶行为的偏差
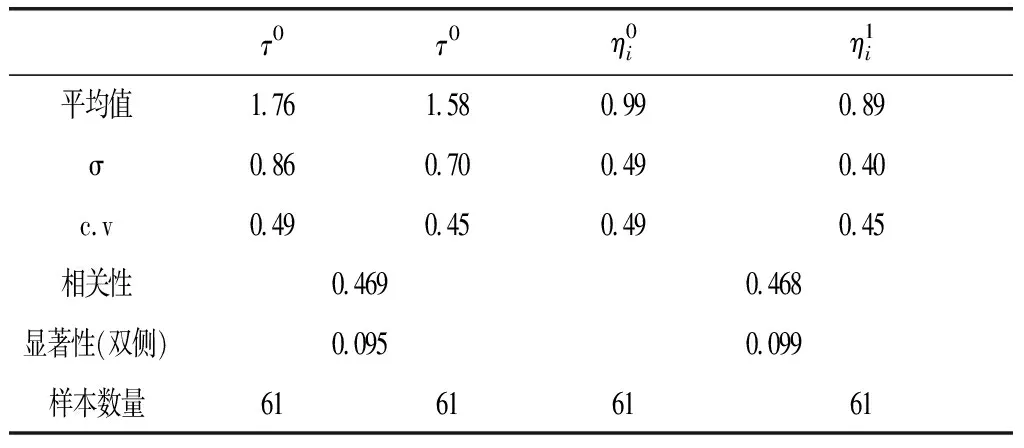
表1 车道变换前后参数配对t检验的统计描述

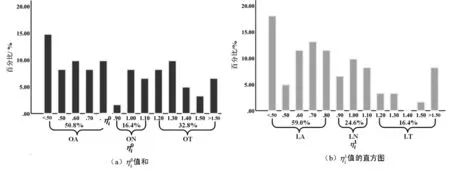
图6 车道变换中的行为分类统计
4 结 论

(1)驾驶员在交通拥挤中表现出显著的异质性。驾驶员在平衡状态下的特性在一定程度上决定了其对交通振荡的反应方式。因此,由于驾驶员的异质性,由驾驶行为引起的交通振荡的形成和传播似乎是不可避免的,这是驾驶员的本质特征。这意味着与驾驶行为相关的振荡诱发将成为驾驶员控制和管理研究的重点。
(2)展示了中国驾驶员的一些典型特征,如道路上驾驶员类别的两极分化比较明显,激进驾驶员比例较高。这个为交通安全驾驶行为研究提供可靠的数据支撑。
