水汽辐射计在射电干涉仪中的应用
2022-01-06徐双敬文世铭
张 镭,张 波,董 健,徐双敬,孙 焱,文世铭,3
(1.中国科学院 上海天文台,上海200030; 2.中国科学院大学,北京100049; 3.上海科技大学,上海200030)
1 引言
射电干涉仪观测的电磁波穿过大气层产生时间延迟,而对流层中的干性成分和湿性成分是造成延迟的主要因素。其中,由于水汽在时间和空间上具有高度可变性,大气中湿性成分的变化速度明显快于干性成分,这使得由水汽引起的湿延迟一直是射电干涉测量技术中最严重的误差之一,对精细成图和高精度定位都将产生不可忽视的影响,在实际观测中必须对该延迟进行校正。
湿延迟与大气中的水汽含量直接相关,水汽辐射计(water vapor radiometer,WVR)是通过测量大气中的水汽辐射量测定水汽及液态水含量的一种微波辐射计,具有高灵敏度、自动化操作、高时间分辨率等优点,拥有非常好的发展前景。从20世纪70年代起,人们在射电天文领域就开始使用WVR技术探测大气中的水汽含量[1]。经过多年的不断改进,水汽辐射计硬件结构的制备水平不断提高,仪器的稳定性和抗噪性愈加完善,反演算法模型的精度也在逐步提高。本文将对近年来水汽辐射计的研究工作进行简要介绍:第2章介绍水汽辐射计的工作原理,包括反演大气廓线及水汽含量的常用模型算法;第3章简要回顾水汽辐射计的研制历程;第4章对水汽辐射计在国内外射电干涉仪中的应用情况作详细介绍;第5章总结水汽辐射计应用于射电干涉测量时的主要误差来源;最后为全文的总结及对未来发展方向的展望。
2 水汽辐射计的基本原理
2.1 获取天空亮温度
大气中的干性成分(如O2,SO2,CO,NO,H2S)和湿性成分(H2O)都会对电磁波产生吸收作用[2]。不同物质对电磁波的吸收、发射和散射效果不同。在微波波段,O2和H2O的吸收作用最为明显。由于水汽与其他干性气体成分会造成射电信号的衰减与传输延迟,而它们都有各自的吸收谱线,通过探测它们对应波段的辐射能量变化,就可以对其含量进行反演。为了便于表征和计算,通常使用“亮温度”这一物理量来表示天线接收辐射能量的大小。物体的辐射能量用同辐射量的黑体温度表示,这个黑体温度值,即亮温度。射电信号在穿过吸收介质时忽略散射效应,则满足辐射传输方程,其在天顶θ方向传输的解为:

其中,v为频率,TB0为穿透介质前的亮温度,TB为天线接收的亮温度,ka为大气吸收系数,z为高度,T为物理环境温度,τ为光学厚度或不透明度。
天线接收到天空中的微波辐射,要先经过信号放大器,使用转换器对放大后的低频滤波进行量化采样,得到一组采样电压,即为亮温度电压。亮温度电压U与天线口面处的目标亮温度测量值TB的关系可用如下的辐射计方程[3]来表示:

其中,GS为辐射计的系统增益,TRN为系统等效噪声温度。因此,为了保证亮温度测量值TB的准确,需要先对增益系数及系统噪声温度进行校正,这个过程称为定标。常用的定标方法有冷热负载定标、天顶定标等。此处以冷热负载方法为例介绍定标过程,即通过获得接收机内部的冷源与热源辐射温度与输出电压,建立如下线性方程组:

其中,Thot和Tcold为热和冷源辐射温度,为已知值;而Uhot和Ucold对应输出电压,为测量值,通过多次测量,即可求解待标定的增益系数GS与系统噪声温度TRN,再根据式(2)将测量得到的亮温度转换为亮温度测量值。
2.2 水汽和液态水的吸收系数
水汽在22 GHz和183 GHz附近均表现有谐振带。在干燥的条件下,使用183 GHz吸收线反演水汽的精度优于22 GHz吸收线[4]。但是当大气路径中的水汽充足时,高频波段由于波长短,水汽对相位的影响容易过饱和,因而对183 GHz频率的测定只应用在高海拔、极地等特殊地区。为此,本文将重点介绍水汽吸收在K波段(20~30 GHz)的反演算法。目前在该波段下,与数据拟合度较好的水汽吸收系数kv模型是van Vleck-Weisskopf(VVW)廓线模型[5]:

式中,v0=22.235 10 GHz为水汽的谐振频率,v为频率,T为气温,P为干空气气压,pv为水汽压。VVW模型水汽吸收系数与频率的关系曲线如图1所示。
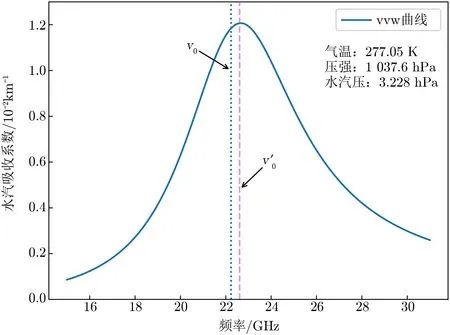
图1 VVW水汽吸收线
除了水汽的吸收系数曲线以外,还需要得到云或雾中的液态水的吸收特性。这是由于液态水会吸收大量的辐射,WVR接收到了来自液态水的亮温度,但液态水对折射指数的改变很小,对湿延迟造成的影响可忽略不计。针对阴云或有雾的天气条件,为了避免因液态水的干扰而导致反演结果产生偏差,要根据液态水的吸收特性将干扰影响剔除。液态水的吸收系数模型由以下公式[6]给出:

其中,ρl为液态水滴的密度,λ为波长。
2.3 气象参数转换
由式(4)的水汽吸收系数模型可知,吸收系数kv和环境气温T、气压P及水汽压pv有关。当外界环境的水汽压和气温已知时,可以由理想气体定律来确定水汽密度ρv(绝对湿度):
2.4 反演模型
水汽吸收系数是正算过程的关键,估算水汽含量(precipitable water vapor,PWV)的过程就是求解式(1)的亮温度的大气微波传输方程,得到水汽吸收系数公式中的水汽压等参量,再由式(8)计算出水汽含量的过程。大气微波传输方程是第一类Fredholm方程。由于亮温度数据的信息度不足,导致方程呈现病态,不能求出它的解析解。
直观的反演方法是分层计算,通过在不同的高度角下测量多组亮温度,得到基于不同高度下的大气参量方程组,再将各分层的解进行曲线拟合,得到大气参量轮廓线。目前可使用较为流行的回归算法和神经网络算法求解该模型方程组。该方法的限制因素包括数据量和经济成本。需要用统计方法对大量历史资料进行时间空间匹配,调试模型权重和参数。大量的观测还需要使用多个通道接收目标区域辐射,该观测过程对技术要求高,成本也较高。为此,在实际应用中通常也可以建立单个统一模型,将式(1)线性简化处理,由测量数据拟合出亮温度修正模型,再由修正的线性亮温度大气微波传输方程计算水汽含量或湿延迟。这种建立简化模型的方法更加经济简便,但测量误差偏差较大,以下将重点介绍一些常见模型。
2.4.1 双通道主流反演模型
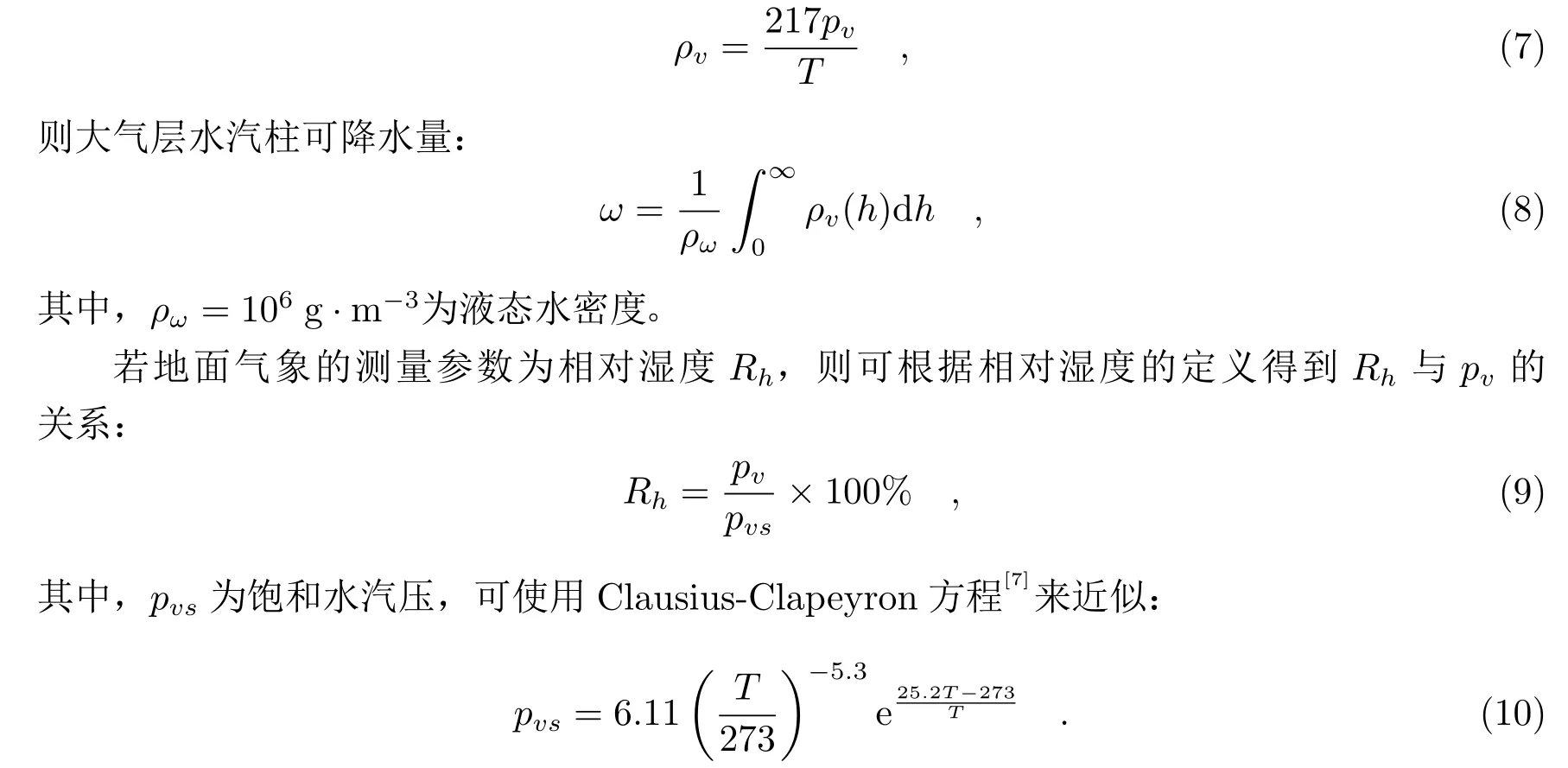
水汽含量与路径延迟呈线性相关(见式(27)),因此水汽含量和路径延迟均可作为模型反演目标。已有研究给出主流的双通道WVR线性模型[8]:
其中,Lv为路径延迟,v1,v2为两个通道的中心频率,TB1,TB2为两个通道的亮温度,Tc1,Tc2分别对应两个通道接收的经大气衰减后的宇宙背景噪声温度,k=1.723×10−3K·g−1·m3,Wm,T0为相关折算函数,展开式可见文献[8],为了降低计算的复杂度,可作为常量拟合处理。
水汽含量和液态水含量也可以通过回归方法进行反演。Guiraud等人[9]利用位于美国丹佛的探空仪6年期间的大气数据(通道频率20.6 GHz与31.6 GHz的WVR),根据该模型的思想给出了如下的系数修正值:

其中,ω为水汽含量(单位为cm),l为液态水含量(单位为cm),TB1和TB2分别对应20.6 GHz和31.6 GHz通道的亮温度。
在历史气象数据充分的基础之上,为了提升反演精度,可加入相关耦合参数,对模型进行改进。
(1)增加地面参数耦合
由于大气剖面参数可能与地面大气参数具有一定的相关性,因此在上述方法的基础之上,可建立如下多元线性回归算式,增加地面坏境参数带来的影响[10]:

其中,P0,H0,T0分别为地面的压强、湿度和温度,ω为视线方向的水汽含量,ai(i=1,2,3,4,5)为系数。
(2)增加高阶项耦合
除了线性关系以外,大气剖面参数与亮温度之间更有可能是复杂的非线性关系。对此,黄彦彬和王振会[11]在式(14)的基础上又增加每个亮温度通道的二次项以及交叉项,得到非线性回归模型:

其中,ai(i=1,2,3,...,8)为系数。
(3)引入大气不透明度
一些模型中使用大气不透明度τ作为反演变量,τ与亮温TB在频率v处的对应关系为:

其中,Tmr为大气平均辐射温度,在一定季节可视为常数270 K[12];TB0=2.9 K为宇宙背景辐射。则计算湿延迟模型可写成:

其中,ai(i=1,2,3)为系数。
2.4.2 多通道WVR反演模型
多通道式WVR反演方法依旧可以采用双通道模型的思想,建立线性相关关系。近年来扫频式甚至全采样式WVR的研制,通过更多更宽的频段获得亮温度,使得亮温度采样数据更加充足。Tahmoush和Rogers[13]对一种扫频式WVR作出介绍,并根据水汽与液态水的吸收性质,建立了如下的亮温度修正模型以提高分离水汽与液态水的精度:

式中,a,b,c为待拟合参数,hv为kv以22.2 GHz为中心频率的归一化值。系数a用来拟合仪器增益的影响。由式(6)表示的液态水吸收系数模型,可以看出kl∝v2,因此,模型第二项bv2用以拟合由液态水造成的影响。
对于某一高度下的大气薄层来说,考虑恒温恒压的条件,代入式(18)中的亮温度修正结果,薄层路径湿延迟d可用下述公式计算:

其中,pv为水汽压,其推导过程可见2.5节。
除此之外,一些应用于射电干涉阵列的多通道WVR使用了另一种反演思路。它并未致力于求解单个天线的路径湿延迟,而是直接计算每两个天线间的路径湿延迟差异,再由式(28)确定其相位差。这同样可以达到对干涉阵中不同天线之间相位波动的求解目的,但要求阵列的各个天线安装相同配置的WVR。使用该处理方法的干涉阵包括VLA(very large array),ALMA(the Atacama large millimeter/submillimeter array),ATCA(Australia telescope compact array)等。以ATCA为例进行说明,ATCA各个天线处安置了4个通道数的WVR(f il ter=1,2,3,4),某两个天线间的湿延迟ΔLv可通过下式进行计算:

其中,CW,filter为权重系数,Kfilter为校正因子,详见文献[15]。
2.5 路径延迟与相位校正
射电干涉仪中的单个天线接收穿过大气层的电磁波信号如图2所示,其沿对流层传播的路径差为:
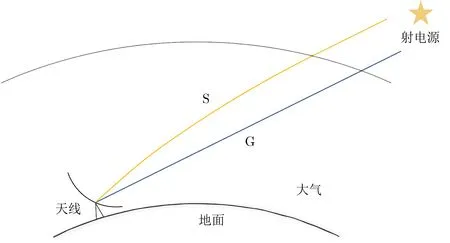
图2 天线接收穿过大气层的电磁波信号示意图

其中,n为折射率,S为折射路径,G为不考虑折射效应的路径,L=∫s nds为信号传播的光程。定义大气折射率N=106(n-1)。对于天顶方向的路径而言,几何延迟项(S-G)可忽略不计,则可得:


若不考虑积分,在大气环境温度为280 K的常量下,由式(7)、式(8)和式(23)可以得到常用的近似估计:

其中,λ为波长,Δφ(单位为度)为校正相位。
3 水汽辐射计发展简介
从20世纪40年代起,van Vleck[16,17]对水汽和氧气在微波波段的吸收特性的研究为大气微波辐射理论奠定了基础。1965年,Layson和Martin[18]对辐射计的微波折射校正理论进行了系统的研究,并给出了Marcor(microwave atmospheric range correction)技术以反演水汽延迟量。20世纪70年代,美国喷气推进实验室(jet propulsion laboratory,JPL)证明了水汽辐射计应用于大地测量领域的可行性。这种通过被动式遥感接收电磁波信号来计算湿延迟的方法也开始应用于射电天文领域[1]。1979年,Wu[8]提出用于对流层路径长度校正的被动微波辐射计的最佳频率对,这为双通道设计的水汽辐射计提供了充足的理论支持。之后的双通道水汽辐射计的频率波段大多依此方法选取,并被广泛用于射电天文领域和大气科学等其他领域。直到目前,依旧有许多观测站在使用双通道式辐射计。瑞典的昂萨拉空间天文台(Onsala space observatory)设立了两台双通道式水汽辐射计Astrid和Konrad。其中Astrid于1980年5月在哥德堡-兰德维特机场与无线电探空仪进行了首次对比测量,Konrad则于2000年8月在埃斯兰奇太空中心(Esrange space center)的基律纳(Kiruna)首次运行。2017年,Forkman等人[20]经过测试表明,即使这两台仪器已经服役多年,它们在4年中的天顶湿延迟反演结果与GPS数据的均方根差分别为0.92 cm,0.75 cm,符合度依然较好。
为了进一步提高WVR的精度,多通道式设计将逐渐取代传统的双通道式设计,成为目前以及未来研制的主流。美国Radiometrics公司设计的MP系列产品辐射计和德国Radiometer Physics公司设计的RPG系列辐射计是目前使用较广泛的两个产品。以MP-3000系列为代表的地基WVR是国内应用较多的产品[21],它开设了35个频率通道[22],其中21个K波段(22~30 GHz)通道,14个V波段(51~59 GHz)通道,检波方式为串行调频,成本较低。RPG系列辐射计的最新型号为第五代RPG-HATPRO-G5,采用14个频率通道,其中7个通道(51~58 GHz)用于温度廓线的反演,7个通道(22.24~31.4 GHz)用于水汽廓线的反演。比较特别的是,它还为极寒天气地区和高海拔地区提供了183 GHz波段通道,来提升低可沉降水汽(PWV)地区的仪器使用性能。RPG-HATPRO-G5采取了并行直接检波方式,提高了设备的可靠性和抗干扰性。图3简要概述了水汽辐射计的发展历程。

图3 水汽辐射计发展事件图
4 水汽辐射计在射电干涉仪中的应用
下文将从连线干涉仪和甚长基线干涉仪两个方面介绍WVR在射电干涉仪中的应用情况。连线干涉仪是指由多元天线系统组成的干涉阵列,天线间用电缆相互连接,进行相对较短距离(如数千米)的干涉测量。甚长基线干涉仪是指利用几台相距更远(如数千千米)的天线协同干涉测量的仪器,仪器之间不使用电缆相连,而是通过独立原子钟提供频率校准并实现时间同步,各自记录,而后进行相关处理,可以进行长距离干涉测量。各干涉仪中的WVR配置情况见表1。辐射计在进行测量任务之前,需要确定仪器测量的准确性,即对增益值的稳定性进行分析,并确定出仪器的系统噪声温度。亮温度测量的准确性将成为影响仪器性能主要因素,评测仪器的性能是大部分观测站的研究人员必须完成的重要工作。在仪器性能稳定发挥的基础之上,将对WVR的时延改正结果与其他改正方法进行对比,并提高湿延迟的改正效果。

表1 射电干涉仪中WVR的工作频段和通道数
4.1 连线干涉仪
4.1.1 VLA
甚大阵列(very large array,VLA)是位于美国新墨西哥州的圣阿古斯丁平原上的大型综合孔径射电望远镜,于1980年开始投入使用。它由28面直径为25 m的射电望远镜组成。其中一面作为备用,另外27面望远镜则排列成Y字型,并可通过铁轨来移动单个望远镜而改变它们的阵型。目前该望远镜阵列拥有A,B,C,D四种阵型,不同阵型对应的最长和最短基线距离不同,来满足各种科学工作的需要。早期VLA天线采用三通道的WVR进行短距离干涉的相位波动数据修正处理,该仪器在21.0,23.5 GHz处设置了带宽为750.00 MHz的通道,在22.23 GHz处设置了带宽为1 000.00 MHz的通道。3个亮温度接收的天线频率相近,为了便于研究水汽波动与多个亮温度的关系,Butler[19]定义了观测量ΔT:

其中,ω1=-0.5,ω2=1.0,ω3=-0.5为三个通道的权重,T1,T2,T3为三个通道的亮温度。三个通道频率的位置如图4所示。
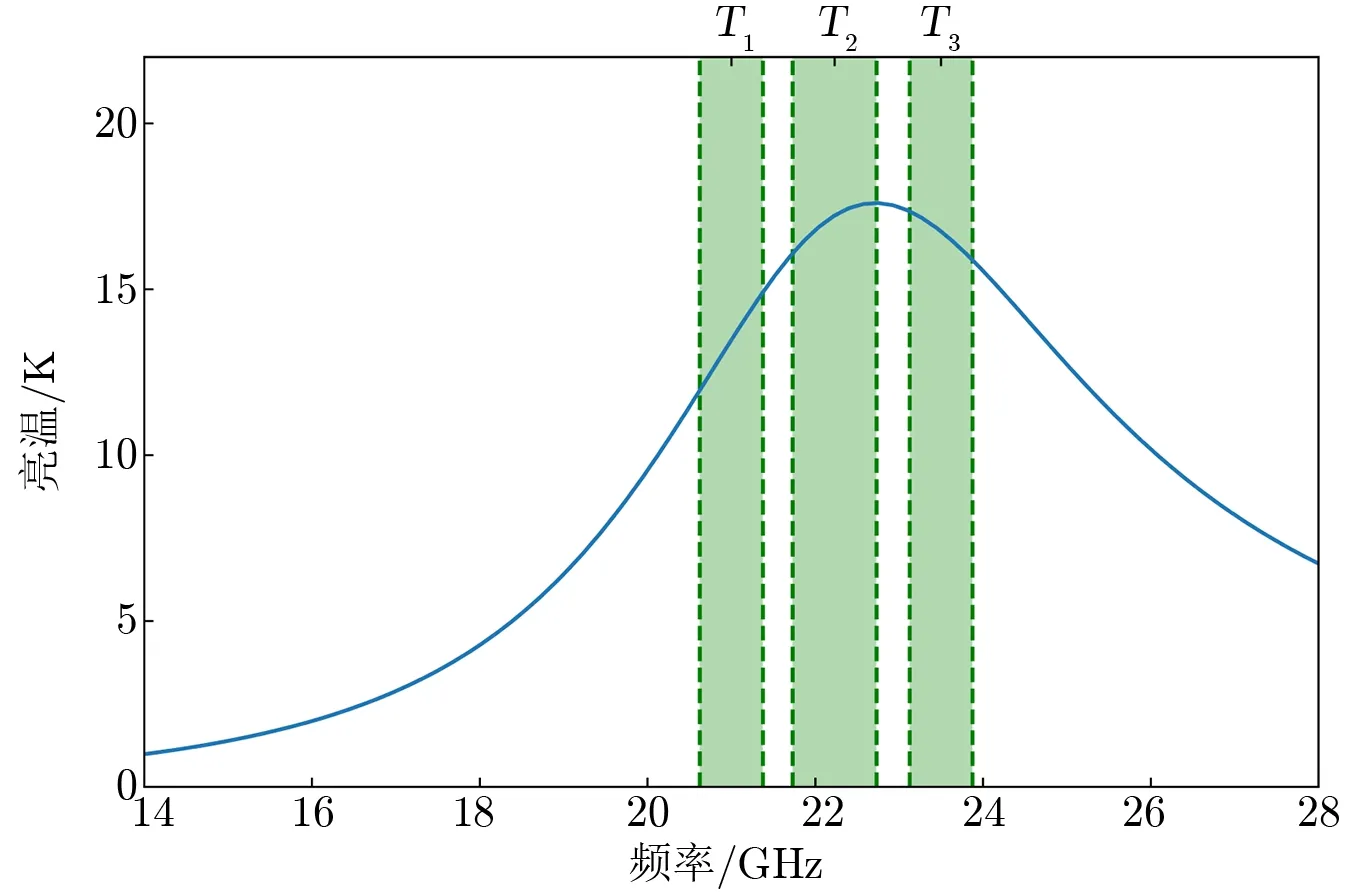
图4 VLA三通道水汽辐射计
2000年,Butler对WVR系统作出评测分析[25],并简要讨论了该WVR系统在滤波器稳定性、液态水因素和波束发散三个方面可能存在的问题。对于50 K的系统温度而言,VLA辐射计的增益稳定性Δg/g须好于0.001 K左右。但测试结果表明增益稳定性在0.002~0.001 K之间,未能达到目标要求;云层中液态水的干扰非常明显,需要对三通道的测量数据作出合理的处理;辐射计与天线的波束发散角约为1.4°,这将导致实际传播路径与仪器测量接收的路径不匹配,产生路径误差。
在2004年的一次测试中,VLA天线WVR的增益稳定性成功达到了预期目标。Chandler等人[26]对两个VLA天线处的三通道WVR进行测试,并给出这次测试的结果。对于既定的小于相位校正预期,先验计算得到在系统温度为50~100 K之间,系统增益稳定性应该为(2~4)×10−4。测试表明,在103s的校正时间内,测试增益稳定性Δg/g为(4~8)×10−5,达到测量目标要求。
由于更高的分辨率和灵敏度、更快速的成像、更广的频率覆盖范围需求,工作了20年的VLA作出功能扩展,升级为EVLA(the expanded very large array)。EVLA的波段带宽加大,因此支持了更多通道系统的辐射计。Chandler等人[27]提出了对原有为VLA服务的三通道WVR进行改进的项目计划。该计划打算设计并生产用于接收EVLA天线K波段的集成型水汽辐射计(compact water vapor radiometer,CWVR)。为了提高仪器的反演精度,将CWVR升级为五通道系统,并在内部组件设计上改为集成型多芯片模块,能有效地缩小WVR的内部空间,使CWVR更容易安装到天线中。
2018年,Gill等人[24]分析并报告了VLA阵列CWVR的实验室测试结果。CWVR用单片微波集成电路来代替原来分散的电路部件,减小自身的体积,机身更加小巧,并增加了区分液态水和水汽的功能。VLA的K波段频率范围为21.40~24.40 GHz,而EVLA在K波段的频率范围为18.00~26.50 GHz,波段带宽加大,因此五通道系统的CWVR的使用是可行的。在仪器稳定性方面,该报告表明其中一个通道的输出波动较大,需要维修校正。而通过温度校正后,所有通道的增益稳定性均小于2×10−4,满足增益稳定性的要求,可以应用于ngVLA(the next generation very large array)。
4.1.2 ALMA
地处智利的ALMA(the Atacama Large Millimeter/submillimeter Array)阵列是多国合作的大型天文观测设施,位于5 000 m海拔高度的Chajnantor高原上。由于地理条件独特,满足干燥特征,因此采用183 GHz频率的水汽辐射计来消除相位波动误差(见第2.2节)。ALMA辐射计拥有一套较为完整的处理系统,ALMA的相关研究人员开发了“wvrgcal”程序,可方便对WVR观测的水汽数据进行离线批处理,并给出了该软件的设计以及程序的详细说明[28]。基于WVR的相位校正原理以及wvrgcal中所使用的算法在ALMA备忘录590[29]中给出。
2012年,Matsushita等人[30]使用该WVR校正大气相位,并研究了WVR相位校正在不同频率、基线长度和天气条件下的有效性。在这次研究中,他们确认所有基线的相位稳定性达到了ALMA规范,相位稳定性通常能够提高2~3倍,有时甚至高达7倍。从不同天气条件下的表现上看,当PWV(precipitable water vapor)分别为0.5 mm,0.7 mm,1.1 mm,2.9 mm时,对应不同基线长度下的总相位误差的2-p ASD(2-point Allan standard deviation)值均有所下降;但在PWV不超过0.3 mm时,WVR相位校正前后并无明显差异。他们猜测,在PWV过低的干燥条件下,干性气体可能成为大气相位波动的主导因素,导致WVR的测量结果产生偏差。另外,即使在良好的天气条件下或在WVR相位校正之后,相位波动的均方根也会随基线长度而增加,长基线的WVR校正效果不佳。
由于干涉阵列自身所处高海拔地域,WVR在干燥条件下的性能校正问题是ALMA干涉阵列的关注点。在PWV小于2 mm且天空晴朗的情况下,RMS相位应低至20µm左右,但实际上只有极少数达到此标准的数据,其残余误差项被认为是由干燥的大气环境所致[31]。Maud等人[32]尝试在wvrgcal程序中加入经验比例因子,通过对WVR原始数据结果进行缩放,来消除测量带来的误差。利用ALMA射电干涉阵观测HL Tau恒星结构特征,在标准WVR改正和加入比例因子后的WVR改正对比见图5。增加比例修正后,环状结构更加清晰。从图5 c)的流量剖面图可以看到,峰值流量得到增加,修正后局部更加尖锐,即亮环和间隙的对比度增加,信噪比得到提高。通过对多组数据总结发现,PWV较低的数据(小于1 mm)对应着较大的缩放比例值,此时采用比例因子的方法会对数据的改进有较为可观的效果。这表明该方法对干燥条件下的测量数据修正有效。

图5 ALMA观测HL Tau恒星的原行星盘结构的标准WVR改正与加入比例修正的对比[32]
2015年,Hunter等人[33]利用高精度点源的观测得出ALMA阵列的几何天线位置。他们使用水汽辐射计来校准每个天线上方的湿延迟,并对测得的数据中的水汽分压和总压进行分离。但校正后的结果显示,湿延迟改正后的影响依旧不能很好地抵消天线垂直方向上的位置偏差。Hunter等人推测该结果是由于使用的水汽反演模型过于简单,不能反应出日常的湿延迟变化而导致的。
2018年,Nikolic等人[34]描述了整个ALMA WVR系统的设计,设计参数的选择和数据处理策略。他们对WVR系统进行了初步测试,结果表明,与以前的系统相比,WVR对改善相位稳定性有了很大的提升,相位校正系数(即天空亮温度变化与电子路径变化之间的关系)高达40 K·mm−1。测试指出影响ALMA处WVR精度的两个因素——液态水(云雾)和与水汽信号不相关的残留相位误差。液态水的影响是WVR目前面临的关键难题。而残留误差的来源尚未明确,测试表明:外界条件越干燥,残留误差越明显;基线长度越长,残留误差越大。
4.1.3 其他连线干涉仪
ATCA(Australia telescope compact array)在六个天线处安置了WVR测量22.2 GHz水汽的辐射变化,用于计算相位延迟。这些WVR拥有四个通道数,分别设在16.5,18.9,22.9和25.5 GHz,带宽为1 GHz。2013年,Indermuehle等人[15]对ATCA阵列处的WVR作出了详细的介绍。通过建立模型校准系数,对亮温度差进行加权得到每个天线对之间的相位差。他们将WVR对相位的修正与插值法修正的结果进行了对比(见表2)。其中,ϵ(correlation efficiency)是插值残余相位与WVR残余相位的标准差σ的衡量值。可以看到,在编号为1―10的短基线中,两种方法相差不大;而在编号为11―15的长基线中,使用WVR修正残余相位的方法优于插值法。
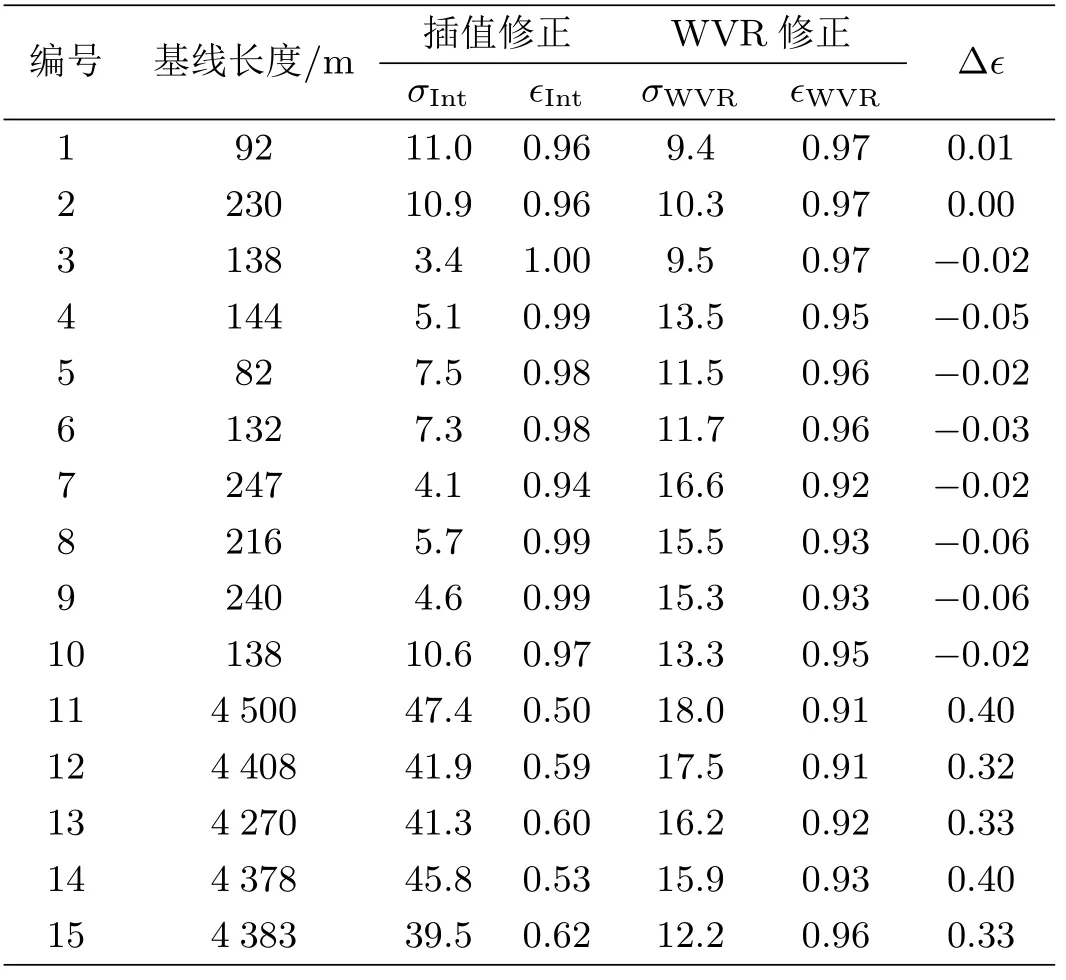
表2 ATCA每条基线残余相位修正对比
SMA(submillimeter array)使用183 GHz的三通道WVR对每个天线处的水汽进行测量,以用于校正短距离干涉的相位波动。2002年对仪器进行检查[35],内部电子元件均表现稳定,影响WVR性能的因素主要来源于混频器和放大器带来的增益不稳定性和接收器温度引起的热源噪声。Martina使用不同的平滑算法尝试削弱这种由仪器噪声和增益偏差所带来的影响[36]。2015年,在由SMA、APEX(the Atacama pathfinder experiment)望远镜、SMT(submillimeter telescope)组网的VLBI观测任务中,WVR担任测量并校正各站大气不透明度的任务[37]。
4.2 甚长基线干涉仪
目前的VLBI网尚未实现为所有台站并置水汽辐射计,WVR在VLBI观测中的应用仅在如下一些射电望远镜站址上做一些研究。
4.2.1 埃菲尔斯伯格望远镜
埃菲尔斯伯格(Effelsberg)100 m射电望远镜位于德国阿尔山(Ahr Hills),是世界上最大的全可动射电望远镜之一。该望远镜安装了18 GHz到26 GHz的扫频式WVR,随目标源而转动,用于在高频VLBI观测期间对对流层延迟和不透明度进行校正。2004年,Roy等人[38]详细介绍了该辐射计及其用于不透明度校正的性能。在大气不透明度的时间序列测试数据中,将WVR的处理结果与100 m射电望远镜处理结果进行对比(见图6),实线为WVR在固定高度角处测得的不透明度,圆点为Effelsberg望远镜分别指向两个不同高度角的光源并利用特定程序计算得到的不透明度。图中两种方法呈现出了很好的趋势一致性,表明WVR数据可用于不透明度校正。
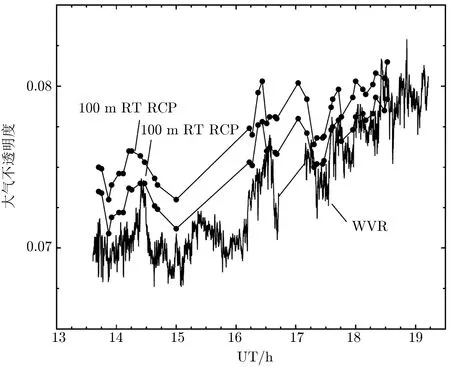
图6 2004年2月13日大气不透明度测量结果[38]
2007年,Roy等人[39]在测量基线Effelsberg到Pico Veleta间的VLBI相位时,展示了一个7 min时间序列的片段。通过WVR的校正使路径延迟的RMS由1.0 mm降到了0.47 mm,在240 s的尺度下的相关性由0.45提升到了0.86。并将WVR与探空仪、GPS三者解算的天顶湿延迟进行对比分析,它们之间的误差在15 mm以内。这表明WVR结果可用于消除短期路径延迟波动,改善大地测量精度,但还不足以独立用于VLBI中对流层延迟的计算。
2012年,Cho[40]利用Effelsberg射电望远镜的WVR观测,对VLBI观测的路径湿延迟进行校正。他结合欧洲天气预报中心的数值天气模型,距Effelsberg望远镜较近的5个GPS站,以及探空仪的数据,与WVR校正的天顶湿延迟进行比较。对比不同时段的观测结果,WVR的天顶湿延迟与GPS和数值模型的结果相差10~50 mm。Cho将原始数据、WVR处理结果、WVR均值平滑后结果、WVR均值平滑加入偏移修正结果等四种不同方案进行比较,最后一种方案的方差与平均偏差最小。从整体上来讲,埃菲尔斯伯格WVR的观测结果尚不能够完全校正由VLBI数据中大气的湿性成分引起的传播延迟,这主要是仪器校准的不完善所致。
4.2.2 中国VLBI网
中国VLBI网(Chinese VLBI Network,CVN)的各观测台站均安置了双通道水汽辐射计,它们是上海佘山65 m、北京密云50 m、昆明凤凰山40 m和乌鲁木齐南山基地25 m射电望远镜。目的是为了在深空探测等对实时性要求比较高的工程项目中实现对湿延迟的校准。2018年,窦世标等人[41]通过对CVN四个并址站GPS与WVR解求天顶湿延迟(ZWD)之间的对比分析发现,昆明站和乌鲁木齐站WVR安置区域相对开阔,测量数据系统差明显,容易进行GPS标校;上海站所处地理位置空气湿润,WVR反演ZWD结果震荡剧烈;北京站WVR安置附近的障碍物较多,GPS与WVR结果的标准差较大。上海站与北京站的WVR数据系统差不明显,不易进行GPS标校。利用2015-2016年CVN四个台站处的GPS天顶湿延迟数据作为参考,来标校四个并址站WVR反演的天顶湿延迟数据。经过标校后,消除了各台站处的WVR数据与GPS数据的系统偏差(以上海站为例见图7)。除此之外,他们还对上海站和乌鲁木齐南山站的WVR稳定性进行检验。上海站WVR两个通道本身的亮温度振荡幅度可达2 K。乌鲁木齐南山站WVR测量黑体的物理温度,在持续时间10~20 h处,两个通道的亮温度值与黑体温度实际值偏差最大达到20 K;这表明仪器的观测稳定性较差,需要提升制备水平。

图7 上海SHAO站GPS与WVR天顶湿延迟(ZWD)标校前后的对比[41]
2020年,CVN各天线引入了新的WVR。其中,密云站、南山站、昆明站分别配置了新的国产双通道WVR,改进了天线罩的设计,使其不易积水。与原配备的WVR相比,亮温度误差技术指标由1.5 K提升为1 K。上海天马站安装了一台德国WVR,采用14个通道反演温度轮廓线和湿度轮廓线,并提供四种定标方法为各个通道的标定校对提供保障:黑体定标、液N定标、噪声注入定标、天顶扫角定标。通道数的增加使测量效率提高,在数据量上可以满足神经网络算法确定回归模型系数的实现,在理论上可使测量性能得到显著提升。
4.2.3 其他天线
DSN(deep space network)天线使用AWVR(the advance water vapor radiometer)对甚长基线干涉测量任务进行辅助校正。它具有22.2 GHz,23.8 GHz,31.4 GHz共3个频率通道,400 MHz带宽。2001年,Linfield[42]介绍了架设于DSN天线副反射面上的WVR。这是一种与天线同轴转动的WVR,可以有效地减小指向误差。文章主要研究了波束宽度对校正性能的影响。从结果上来看,其性能由低到高的排序依此为距天线50 m的4°FWHM(full width at half maximum)的WVR,天线同轴的4°,2°和1°FWHM的WVR。其中,效果最佳的1°FWHM的WVR可以使对流层湿延迟校准的阿仑方差在10 s的时间尺度下降低至校准前的
JCMT(James Clerk Maxwell telescope)使用183 GHz水汽辐射计进行辅助校正。2001年,Wiedner等人[43]利用由JCMT望远镜与CSO(Caltech submillimeter observatory)所组成的干涉仪在0.85 mm波长进行观测,并通过两个183 GHz的WVR进行相位校正。结果显示,通道1和通道3的相位校正效果较差,但通道2的校正效果最优,可使相位波动从141µm降到61µm。2008年,Dempsey和Friberg[44]使用WVR对大气校准的优化,将HARP(heterodyne array receiver program)计算出的不透明度曲线与WVR的不透明度曲线在高仰角处进行对比(见图8),结果吻合度较好,WVR可以在短时间的测量尺度上为计算大气不透明度作辅助优化,提高VLBI任务中的湿时延校正性能。
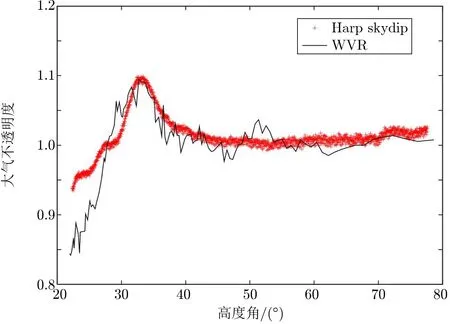
图8 2008年5月9日使用HARP skydip测量不同高度角处的大气不透明度[44]
5 误差来源
由于目前对WVR技术的掌握程度还不算成熟,水汽辐射计反演路径湿延迟的数据中常存在较大的误差。造成数据精度不足的原因可能有以下几个方面:
(1)液态水造成的影响。对流层的湿延迟来自于大气中的水汽,而液态水对信号传播时的折射率影响很小,因此造成的路径差异很小。但是使用WVR接收天空中的微波辐射时,液态水吸收了大量的亮温度辐射,并在后续的反演算法中增加了其导致的路径延迟。只有将测量得到的水汽和液态水的亮温度完全分离,才能解决液态水所带来的影响。这也是水汽辐射计反演测量方法中的一大难题。
(2)仪器本身的噪声。由公式(2)可知,由WVR仪器本身的系统温度噪声TRN和增益系数GS决定了接收到亮温度的准确性。在比较干燥的条件下,亮温度值较低,此时系统温度噪声占据了主导地位;而增益系数的偏差会造成比例误差因子。这都将降低亮温度测量值的准确性,并导致最终修正的路径延迟偏差变大。
(3)大气模型的精确性有待提高。如对流层温湿度垂直分布模型存在误差,液态水模型不够准确,未考虑干性气体对折射率产生的影响等。由不同的温度和压强导致干性气体对信号的折射率发生变化,从而使路径长度发生变化引起的误差。Rogers[45]提出这种由气体中的干燥成分所造成的路径变化可能占到30%。
(4)波束不匹配。在相同的信号波长下,由于天线本身的口径不同,对应的分辨率不同,天线的半功率波束宽度不同。图9展示了天线波束不匹配造成的影响。Tahmoush和Rogers[13]分析得到,对于一个直径为10 m、接收波长为3 mm的射电天线,假设WVR的天线口径为60 cm,那么WVR波束只与该天线在同指向方向的400 m处完全匹配。波束失配减少了WVR估计的湿延迟路径变化与实际传播的路径变化的相关性,平均可导致0.3 mm的延迟误差。
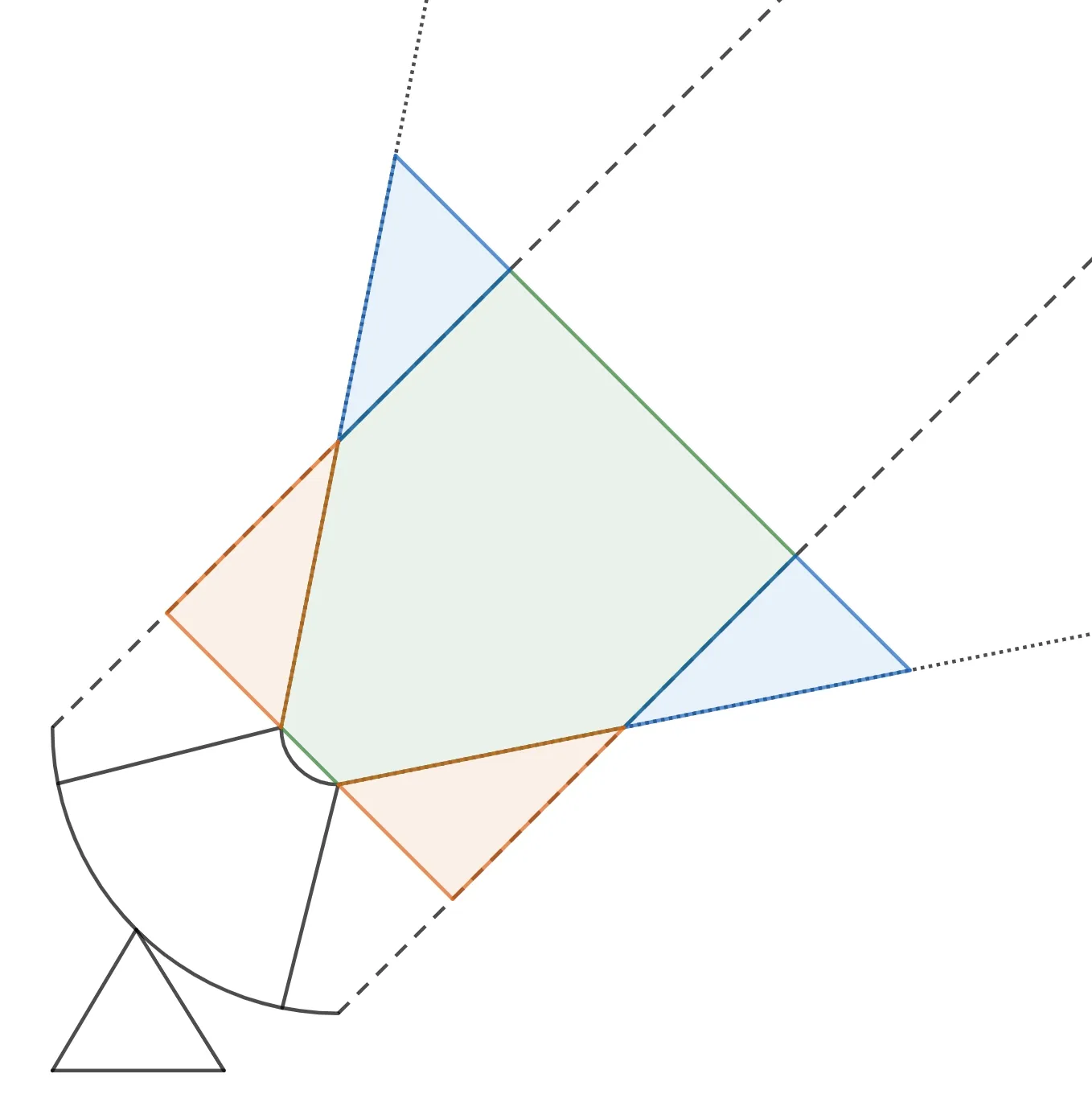
图9 WVR与天线波束不匹配示意图
(5)目标源的指向误差。WVR的安放位置不与天线协同转动,此时WVR的指向需要与天线指向保持一致。即使大气较为均匀的条件下,指向中的抖动也会导致比较明显的路径长度变化。在20°物理环境温度,WVR高度角指向为20°,22.2 GHz的线中心处辐射亮温度为30 K时,0.1°的仰角误差会造成0.6 mm的路径长度变化[13]。
(6)反演算法模型的误差。目前使用较多的统计分析回归模型、迭代算法模型等均存在着不同程度的误差,不能真实地反应出亮温度与实际大气轮廓曲线之间的关系。使用更加灵活的神经网络模型算法反演水汽的垂直分布可减小模型误差[46],但是需要提供大量的历史数据。
(7)其他干扰所导致的误差。如来自于机箱顶部露水造成的干扰;目标源与太阳比较近,易受到太阳辐射的干扰;目标源处于低仰角处,容易接收地面辐射等。
6 结束语
本文综述了WVR的仪器设计的发展,反演算法的概况以及在国内外射电干涉仪领域上的应用情况。WVR的发展已有50多年,它在实时测量、高度自动化、高灵敏度以及不受地理位置影响等方面的便捷性和优势,是其他探测水汽含量技术所不具备的。目前大部分水汽辐射计正在向更多的频率通道数发展,以得到更加准确的亮温度测量值。综合来讲,水汽辐射计在未来仍将是消除对流层湿延迟误差的研究热点,具有非常好的发展潜力和前景。
文章从原理上介绍了反演路径延迟的理论。但在实际应用中,复杂的气象条件会导致诸多误差因素,多采用反演模型计算。在观测站放置WVR时,需要利用大量常规历史资料对仪器和模型进行调试。因此,不同的站通常对应着不同的模型参数,地域性差异较大。由于精度具有偏差和不稳定性,目前WVR还不能用于主动校正VLBI对流层的湿延迟,而是多以辅助改善湿延迟结果为主。根据近年来人们对WVR的研究,还没有比较合适的方法来解决长基线干涉的误差问题,其发展瓶颈主要是液态水干扰项。从硬件上可以增加通道或扫描频率以提升拟合精度,如Effelsberg望远镜处的扫频式WVR,MP及RPG系列的WVR最新产品也拥有多个通道数。从反演函数的拟合角度,可以使用神经网络对可能产生影响的参量自动归纳总结,如添加季节标签或年积日参数,添加地面气象数据等。在拥有大量历史资料的基础上,可以实现网络权重的拟合。随着人工智能领域的迅速发展,算法的改进也许能在WVR的实践上带来更多突破。另外,Kawaguchi[47]提出可通过对水汽共振周围的频谱测量,将共振频谱拟合到理论值,再估算出水汽总量的方法,来达到分离水汽和液态水的目的。目前已有新型数字水汽光谱仪实现此方法,然而其在解决WVR的液态水干扰问题中的效果还有待将来实测数据的检验。