基于Adams的工程车辆操纵稳定性仿真分析及试验对标
2022-01-05李政周松平
李政,周松平
基于Adams的工程车辆操纵稳定性仿真分析及试验对标
李政1,周松平2
(1.益阳职业技术学院 汽车工程系,湖南 益阳 413000;2.三一汽车制造有限公司,湖南 长沙 410000)
文章基于多体动力学理论,利用Adams虚拟样机技术,建立整车多体动力学仿真分析模型,开展整车操纵稳定性仿真分析及试验对标,验证了多体动力学整车模型的可靠性,为后续车型开发及操纵稳定性优化提供了强有力的模型验证手段及设计方向。
工程车;Adams/car;操纵稳定性;仿真分析
前言
随着国家经济的飞速发展,人民生活质量的不断提升,汽车的操纵稳定性及舒适性得到人们越来越多的关注,现在基本成为人们购车的关键因素之一。受乘用车操纵稳定性的影响,商用车的整车操纵稳定性也逐步开始受到重视,在商用车的整车开发流程中,操纵稳定性试验是众多试验中不可或缺的一环。
1 整车多体动力学模型搭建[1]
本文研究对象为某重型工程车,整车主要参数如表1所示。
本文对标车型为4轴商用自卸车,前后悬均采用板簧悬架,转向系统为液压助力循环球式转向器,采用Adams自带标准模板,更新子系统参数,将前后悬架系统、转向系统、驱动系统、制动系统、车头、车身、车架及轮胎系统拼装成多体动力学整车模型。为提升模型精度,在各子系统模板中加入摩擦、阻尼、扭转刚度等可调参数,并将整车车架进行柔性化处理。整车模型如图1所示。
表1 整车基本参数
参数满载质量/kg1-2轴距/mm2-3轴距/mm3-4轴距/mm前板簧刚度/(N/mm)后板簧刚度/(N/mm) 值3 1501 3504 2506607004 500 参数前轮距/mm后轮距/mm前轮前束角/(°)后轮前束角/(°)前轮外倾角/(°)后轮外倾角/(°) 值2 3901 8800.1±0.20.1±0.20.8±0.50.5±0.5
2 整车操纵稳定性试验及仿真对标分析[2]
目前,各个乘用车主机厂公司在《GB/T 6323—2014汽车操纵稳定性试验方法》的基础上,都有了自己公司一套成熟的操纵稳定性试验方法及评价体系,商用车的操纵稳定性试验处于起步阶段,并没有形成公司独有的试验方法及评价体系,所以商用车基本是按《GB/T 6323—2014汽车操纵稳定性试验方法》及《QC/T 480—1999汽车操纵稳定性指标限制与评价方法》进行整车操纵稳定性试验及指标值评价。
2.1 蛇形工况
国标采用“绕桩行驶”测量法,根据测试车辆整车整备质量,参照国标标准,确定蛇形试验车辆车速为50 km/h,标桩间距为50 m,如图2所示。
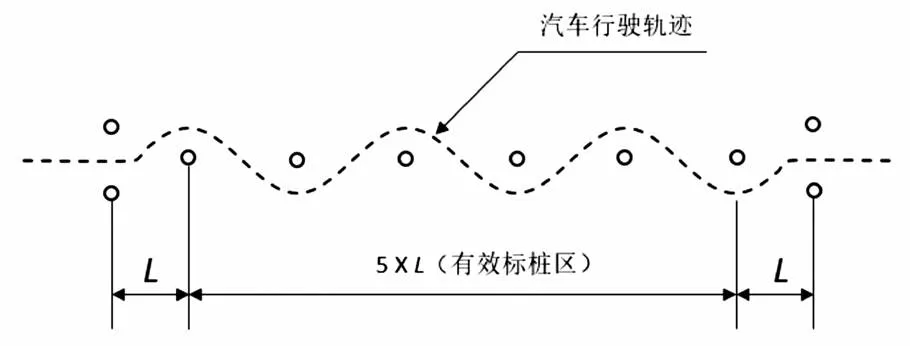
图2 标桩布置
蛇形工况[3]通过对车辆车速、方向盘转角、横摆角速度及车身姿态角的稳定性等数据的测量,来对整车操纵稳定性的性能进行评价。按国标规定,试验数据在处理时,需要剔除掉无效峰值,如图3所示。

图3 试验数据处理
所以,仿真对标结果,在进行蛇形工况操纵稳定性性能指标评价计分时,也需要参考试验国标计分方法,具体参数指标如下:
平均横摆角速度峰值按公式(1)确定:

平均车身侧倾角按公式(2)确定:

仿真试验对标结果曲线如下所示:

图4 蛇形工况侧向加速度
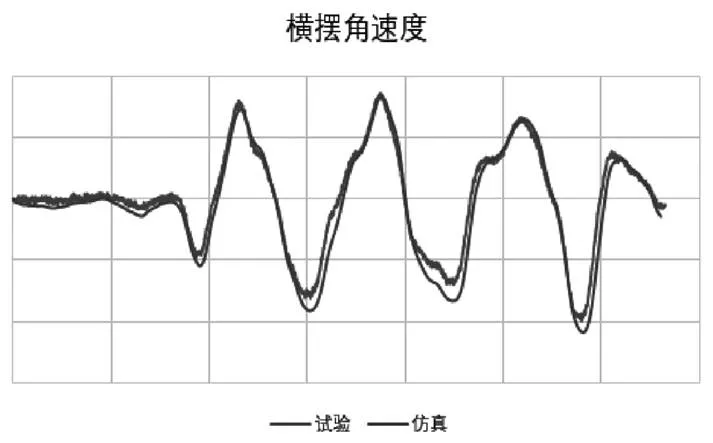
图5 蛇形工况横摆角速度

图6 蛇形工况车身侧倾角
2.2 稳态回转工况
稳态回转工况主要评价车辆的转向特性及车身的侧倾特性,从而判断车辆转向行驶时的稳定性。不足转向度及车身侧倾度,是稳态回转工况衡量车辆操纵稳定性的重要指标。具有不足转向特性的车辆,一般具有良好的操纵稳定性,而具有过度转向特性的车辆,会驾驶困难,并且车辆在达到临界车速时,容易失控。
国标采用的是“固定转角法”来进行稳态回转试验。试验时,先让车辆进行至少3公里的里程行驶,保证轮胎升温。然后让车辆沿半径25 m的圆匀速行驶,调整方向盘转角,待车辆在大半个圆周都可以对准车道中心线时,固定此时的方向盘转角,停车记录此时车辆各参数的零线。然后缓慢且均匀加速(保持前后加速度为0.2 m/s2),直到车辆侧向加速度达到6.5 m/s2(或车辆发动机所能允许的最大侧向加速度、或汽车失控)为止,记录整个试验过程中车辆的各个参数状态。按左转及右转两个方向进行,每个方向试验次数不能低于3次。
稳态回转工况[4]考察的指标参数是最大侧向加速度、不足转向度及车身侧倾度。最大侧向加速度就是车辆在回转过程中所能达到的最大侧向加速度,用a表示;不足转向度是车辆在侧向加速度为2 m/s2时,前后轴侧偏角差与侧向加速度的比值,用U表示;车身侧倾度是车辆在侧向加速度为2 m/s2时,车身侧倾角与侧向加速度的比值,用A表示。前后轴侧偏角由式(3)确定:

式中:1为前轴侧偏角,(°);2为后轴侧偏角,(°);为车辆轴距,m;0为初始车辆转弯半径,m;R为试验过程中,第点的实时转弯半径。第点实时转弯半径由式(4)确定:

式中:V为试验过程中,第点的实时车速,m/s;φ为试验过程中,第点的实时横摆角速度,(°)/s。

图7 稳态回转工况侧向加速度
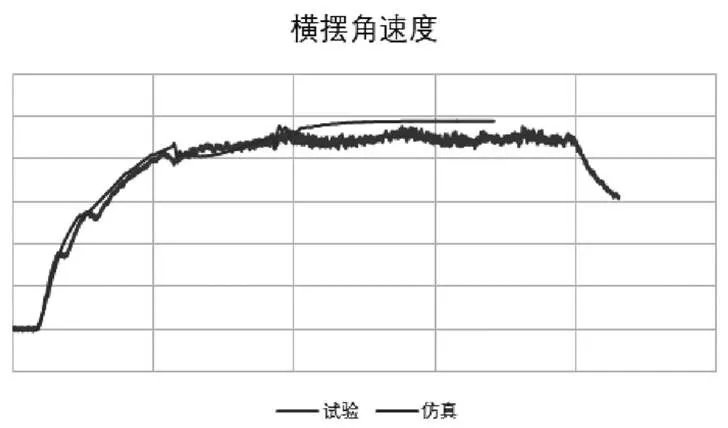
图8 稳态回转工况横摆角速度
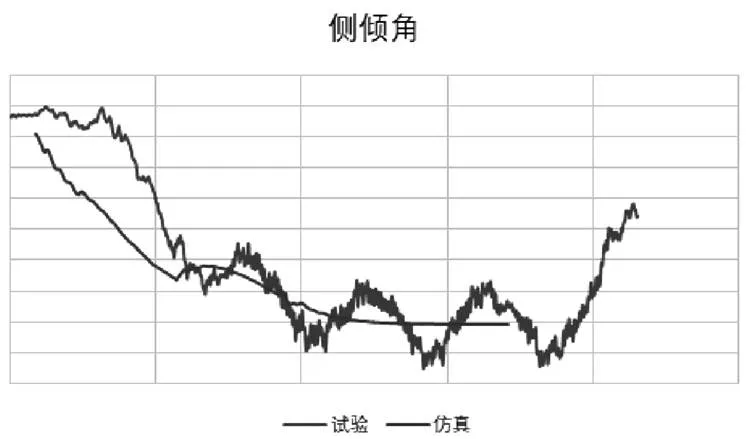
图9 稳态回转工况侧倾角
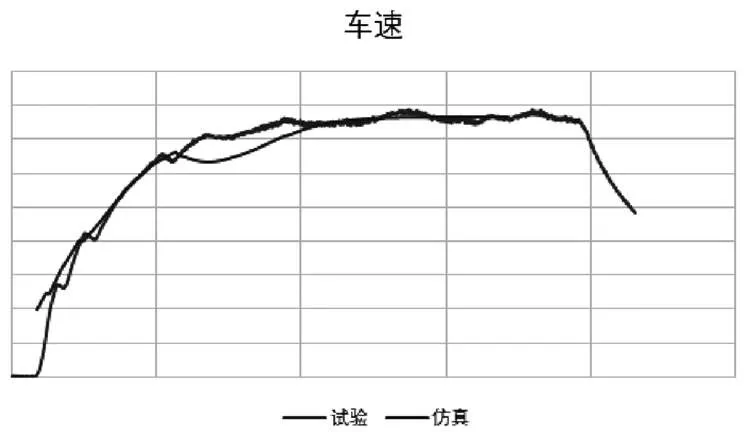
图10 稳态回转工况车速
2.3 转向回正工况
转向回正性试验[5]是鉴别汽车转向回正能力的一种试验,也是转向盘力输入的一个基本试验,该试验能表征和评价一辆汽车由曲线行驶自由恢复到直线行驶的过渡过程和能力。
国标规定,汽车沿半径15 m的圆进行圆周行驶,逐渐加速,使得侧向加速度达到m/s2,固定方向盘转角,保持车速稳定,并开始记录数据,待3 s后,驾驶员松开方向盘,至少记录松手后4 s的汽车运动过程。按左转及右转两个方向进行,每个方向盘试验至少3次。
考察汽车转向回正能力的指标有很多,如:
车辆稳定时间:从松开方向盘时刻开始,至横摆角速度达到新的稳态值(包括零值)为止的一段时间间隔。
残留横摆角速度:在横摆角速度时间历程曲线上,从松开方向盘时刻开始,3 s时横摆角速度绝对值(包括零值)。
回正速度:在方向盘转向角时间历程曲线上,从松开方向盘时刻开始,1 s后横摆角速度的差值与时间的比值,按公式(5)确定:
=(0−1)/T (5)
式中:为回正速度,(°/s);0为松开方向盘时刻,方向盘转向角,(°);1为松开方向盘1 s后,方向盘转向角,(°);T为松开方向盘时间1 s。
横摆角速度总方差按式(6)确定:

式中:Er为横摆角速度总方差,s;rk为横摆角速度时间历程曲线第k点瞬时值,(°)/s;r0为横摆角速度初始值,(°)/s;n为采样点数,按n×∆t=3s选取;∆t为采样时间间隔,s;一般不大于0.2 s。

图12 低速回正工况车速
3 结论
以工程机械4轴自卸车为研究对象,利用Adams虚拟样机技术建立整车多体动力学模型,并进行整车操纵稳定性相关工况对标分析,应用Adams后处理模型进行数据处理,与试验结果数据进行对标分析,验证了仿真分析结果数据与试验结果数据基本吻合,证明了所建的虚拟仿真模型的可信度,为后续车型开发及性能优化提供了准确的虚拟仿真模型及可信的虚拟仿真技术,能有效地节约性能优化时试验测试费用,节省试验测试时间,缩短产品开发周期,提升产品竞争力。
[1] 田文彬.基于ADAMS/CAR的汽车操纵性动力学仿真[D].福州:福建工程学院,2011.
[2] 程源,张翼,李鹏,等.基于ADAMS的汽车操纵稳定性仿真试验研究[J].公路与汽运,2011,18(2):7-9.
[3] 陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[4] 李自平,郝锌,杨钧浩.某轿车操纵稳定性试验与仿真对比分析[J].汽车实用技术,2020,27(10):156-158.
[5] 全国汽车标准化技术委员会.汽车操纵稳定性试验方法:GB/T6323—2014[S].北京:中国标准出版社,2014.
Simulation Analysis and Test Benchmarking of Operation Stability of Engineering Vehicles Based on Adams
LI Zheng1, ZHOU Songping2
(1.Department of Automotive Engineering,Yiyang Vocational and Technical College, Hunan Yiyang 413000;2.Sany Automobile Manufacturing Co., Ltd., Hunan Changsha 410000)
Based on the multi-body dynamics theory, using adams virtual prototype technology, establish the vehicle multi-body dynamic simulation analysis model, carry out the vehicle operation stability simulation analysis and test benchmarking, verify the reliability of the multi-body dynamic vehicle model, for the subsequent model development and control stability optimization provides a powerful model verification means and design direction.
Engineering vehicle; Adams/car; Control stability; Simulation analysis
U461.6
B
1671-7988(2021)23-114-04
U461.6
B
1671-7988(2021)23-114-04
10.16638/j.cnki.1671-7988.2021.023.032
李政,男,助理讲师,车辆工程工学学士,就职于益阳职业技术学院汽车工程系,主要从事车辆工程相关技术的研究。
