渔船助航设备信息融合理论研究与特定区域管控系统设计
2022-01-04甘易明刘全良
甘易明,贺 波,刘全良
(1 浙江海洋大学海洋工程装备学院,浙江舟山 316022;2 中创海洋科技股份有限公司,浙江舟山 316000)
随着近海渔业资源日渐稀缺,渔船捕捞范围不断扩大,渔业资源较为丰富的区域招致大量渔船争相捕捞。渔船在特定区域附近作业过程中,由于渔船驾驶舱内船舶自动识别系统(AIS)和雷达易受外界因素影响,所获数据信息与渔船海上实际位置误差较大,且驾驶舱内缺少出入该特定区域的相关报警提醒导致海上事故频发的问题日益凸显。
此前一些学者对船舶自动化、智能化方向进行了一些研究,如:无人艇航迹跟踪系统、船位监控系统的设计[1-3];船舶控制系统集成一体化方向的探究[4-8];海上信息集成显示系统的设计[9-11];船舶航迹融合算法的研究等[12-15]。而对于渔船上驾驶舱助航设备信息融合以及相关助航功能开发方面则鲜有报道。
研究符合渔船实际生产需要的特定区域管控系统,是当前迫切需要解决的技术问题,也是后续推动渔船海上航行向自动化、智能化方向发展的重要基础。
本研究结合前期学者对信息融合、海上信息集成显示等方面的研究,针对渔船驾驶舱内AIS与雷达所获信息误差大、特定区域内缺少必要报警监控导致事故多发等问题,重点研究了AIS与雷达信息融合技术、海上信息集成显示技术,根据渔船实际生产需要,模拟仿真了渔船航迹融合过程,经分析后确定信息融合方案,最终构建了基于YimaEnc海图引擎的特定区域管控系统。
1 助航设备信息融合方案研究与设计
1.1 AIS与雷达信息融合预处理
渔船上AIS与雷达信息有不同的设备采样时间,设备获得的目标信息时序存在差异,需要使用外推法对设备收集的数据信息进行时间校准[16-17]。为了使设备采样时刻对准到预先配置的系统时刻,通过判别式判断,如式(1)所示:
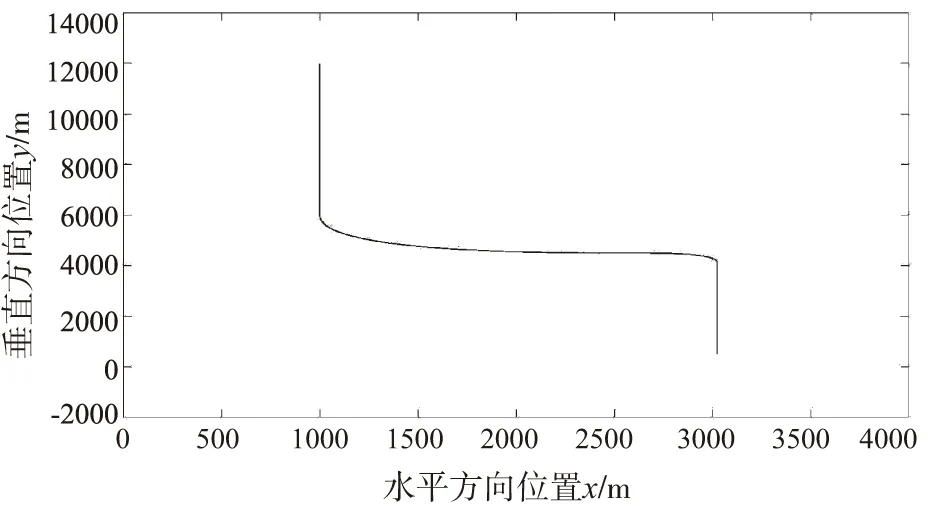
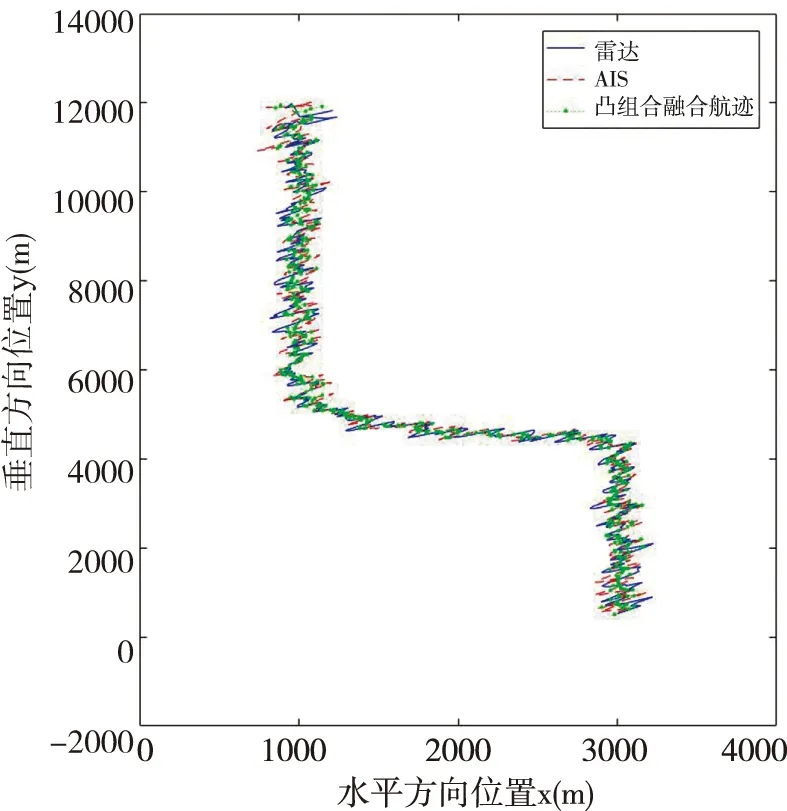
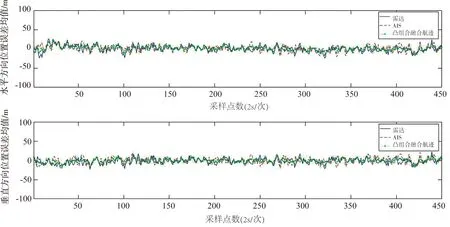
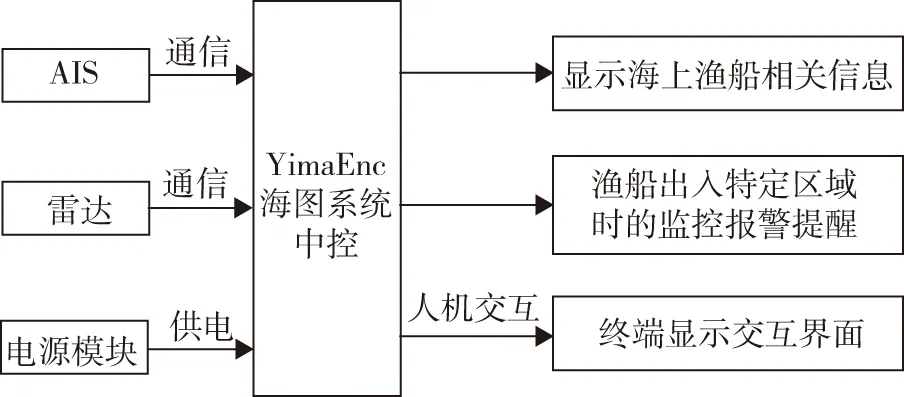
tAi-tRi (1) 式中:N为系统预先设定的设备关联性阈值,s;tAi、tRi分别为AIS与雷达的设备采样时间,s。 将符合判别式的设备采样时刻数据通过外推法处理实现时间对准,通过归类得出系统采样时刻t及其相对应的目标状态信息。 为了使AIS与雷达完成空间校准,需将AIS的WGS-84(World Geodetic System 1984)坐标系信息通过墨卡托投影法转换为平面信息[18],同时将雷达的极坐标信息转换为平面信息。 通过时空校准方法将目标渔船相关数据预处理后,结合渔船海上航行实际情况,采用基于位置信息的关联算法完成渔船航迹关联计算,由归类所得采样时刻序列t1,t2,…,tm内AIS以及雷达检测的目标位置经、纬度数据信息,如式(2)、(3)所示[19-20]。 (λA1,φA1),(λA2,φA2),…,(λAm,φAm) (2) (λRg1,φRg1),(λRg2,φRg2),…,(λRgm,φRgm) (3) 式中:(λAm,φAm)为AIS所测目标位置经纬度信息;(λRgm,φRgm)为雷达所测目标位置经纬度信息;m为所设公有采样时刻序列;g为雷达对应采样时序内所得数据个数,取g=1,2,…,j。 应用卡尔曼滤波算法对关联数据进行平滑处理。渔船在海上航行时,其运动过程可以由匀速模型、匀加速模型、转弯模型等组成,引入卡尔曼滤波算法表示渔船运动系统更新方程如下所示[21]: (4) Pk|k-1=fk-1Pk-1|k-1FTk-1+gk-1Qk-1GTk-1 (5) 根据渔船运动模型特点,设其转移矩阵fk-1为: (6) 系统噪声矩阵gk-1为: Gk-1=[T/2 1T/2 1] (7) 系统协方差阵Qk-1为: (8) 凸组合航迹融合算法是一种较常用的分布式信息融合算法,该算法考虑多设备误差,在信息融合过程中,需对所收集数据进行预处理,并把处理结果传输至系统核心节点处进行融合计算[22-30]。 在Matlab中设置状态估计误差相互独立的凸组合航迹融合方程如下所示: (9) P-1=(PA)-1+(PR)-1 (10) 结合渔船实际运动特征,考虑渔船匀速、慢转向、急转向等不同运动方式,在Matlab中建立该渔船航迹模型如图1所示。 图1 真实航迹设定Fig.1 Real track setting 模拟AIS与雷达分别获取带有噪声的目标航迹信息,对其数据进行时空校准、航迹关联、卡尔曼滤波处理。将预处理结果运用凸组合航迹融合算法实现AIS与雷达数据融合,其结果及其误差如图2、图3所示。 图2 航迹融合模拟Fig.2 Track fusion simulation 由图2、图3中误差对比结果不难发现,在考虑设备误差的前提下,该算法适用于渔船的实际作业需求,经凸组合算法所得的渔船航迹融合结果要优于单一助航设备雷达和AIS测量所得结果,误差较小,较接近渔船实际航行轨迹,明显提高了海上渔船位置信息的精确度。因此凸组合航迹融合算法可以作为航迹融合方案。 图3 航迹模拟误差均值Fig.3 Mean error of track simulation 根据上述渔船驾驶舱助航设备信息融合理论研究以及模拟AIS与雷达信息融合分析结果,提出了渔船驾驶舱助航设备信息融合算法,如图4所示。由AIS与雷达获取目标位置信息,经时空校准、航迹关联、卡尔曼滤波后,使用凸组合航迹融合算法进行信息融合,得到融合结果后结束进程。 此前学者采用Bar-Shalom-Campo算法、位置关联算法等进行信息融合的方案[22-23],未考虑渔船实际作业过程中AIS与雷达因外界因素影响导致的误差及其相关性。本研究设计方案采用的凸组合航迹融合算法,充分考虑了渔船上AIS与雷达的实际生产工作需要,并将两者所产生的误差相互关联,模拟融合结果如图2所示,融合结果明显优于单一助航设备雷达和AIS测量所得结果。 不过该方案仍需进一步完善,未来可以继续增添北斗系统等其他助航设备参与融合计算过程,使融合结果精度更高。 为减少渔船误闯入特定海域或驶出规定渔区而引发的冲突、事故,设计渔船特定区域管控系统如图5所示。该系统是基于YimaEnc海图引擎构建的,其中YimaEnc是在YimapCore基础上开发的海图GIS引擎。将AIS与雷达数据输入系统中控,经助航设备信息融合算法计算后,输出至终端显示。渔船驾驶人员可以通过终端上的人机交互界面对海上特定区域进行设置,经系统分析,对特定区域附近作业的渔船进行监控管理、越界报警。 图5 渔船特定区域管控系统结构图Fig.5 Fishing vessel specific area control system structure 以YimaEnc海图引擎为核心,构建渔船特定区域管控系统,为该渔船特定区域管控系统绘制海图显示界面。应用前文提出的助航设备信息融合算法处理渔船驾驶舱内AIS与雷达获得的数据信息。经分析计算后,应用海图引擎相关指令接口在海图界面上显示海上渔船信息,如图6所示。 图6 渔船特定区域管控系统界面Fig.6 Fishing vessel specific area control system interface 图6中,红色三角形区域为设定绘制的特定报警区域,当本船靠近特定区域边界时,系统将发出提示信息,并显示海上其他渔船驶入或驶出该区域时的相关出入信息警报,起到了报警监控的作用,使渔船海上航行作业过程更加安全。 此前有学者设计了通导设备集成系统、海图显示系统等[11-21],但此类集成系统海图相关功能较为基础,未涉及渔船特定区域航行管控、报警等特定功能的开发。 该特定区域管控系统可以使渔船驾驶人员根据实际需要,通过系统界面设置必要的特定管控区域,有效减少因误驶入、驶出特定区域而引发的事故与冲突。 根据渔船实际生产需要设计了以凸组合航迹融合算法为核心的信息融合方案,针对渔船在特定区域航行时缺少出入监管、报警提醒等问题,提出了渔船特定区域管控系统,应用信息融合、海图信息显示等技术实现了该系统的软、硬件设计;完成了对渔船助航功能开发的进一步探索;初步解决了海上渔船信息精度低,缺少特定区域航行出入时的必要监管、报警等问题,可以有效加强对海上渔船的管控,减少不必要的事故和冲突,有助于提高渔船海上航行安全性。该系统的改进之处:在该系统基础上,继续添加北斗导航系统所测渔船位置数据信息参与数据融合计算,可以进一步提高位置信息精度;显示界面不够简洁、智能,尚需对其进一步优化,使之更美观、易用;该系统功能尚需完善,可根据监管、报警信息,为渔船提供相应避碰、自动规划航迹等功能。 □

1.2 AIS与雷达信息融合

1.3 助航设备信息融合算法设计
2 渔船特定区域管控系统设计与功能实现
2.1 渔船特定区域管控系统设计
2.2 渔船特定区域管控系统功能实现

3 结论
