一种振动式轻便冬枣采摘收集装置设计
2021-12-29鹿贺伟徐慧群张建军
鹿贺伟,徐慧群,李 阳,张建军
(青岛理工大学 机械与汽车工程学院,青岛 266525)
冬枣外形润滑有光泽,枣皮较脆,果肉丰富且质鲜嫩而酥脆,冬枣中含有丰富的对人体有益的微量元素,这些微量元素是人体生长发育和健康的重要保障[1]。冬枣的成熟期较晚,故冬枣采摘工作属于典型季节性强和劳动密集型工作[2]。冬枣种植中需及时划锄松土,使枣园土壤保持适宜的墒情,是提高后期冬枣产量和品质的有效途径之一[3]。一般枣园都要及时划锄松土,增强根系吸收水分中矿物质养分的能力,而这也就导致了枣园土壤松软,不能承载重型机械的进入,在质量方面限制了采摘收集机械的设计。
目前人工采摘依然是应用最广的一种采摘方式,但相比于机械采摘,人工采摘劳动成本高且效率低下,不适用于大规模种植的高强度作业。当前,国内学者对果实采摘机械的研究逐渐深入。刘铮等[4]针对青梅果实的采摘设计了具有五自由度机械臂采摘机器人;刘富成等[5]设计了可控制采摘力度的基于金属涵道的负压吸力苹果采摘系统;王维信等[6]针对水果种植业采摘效率低下的现状,设计了一种以伺服电机和气压驱动的平面连杆机构和末端抓手组成的新型水果采摘器;李志鹏等[7]利用滑块摇杆机构设计了一种环抱吞咽式的脐橙采摘执行器,进行了运动学和静力学分析,并利用Adams软件进行了运动学仿真;程堂灿等[8]以RB03型六自由度机器人为研究对象,在MATLAB软件的Robotics Toolbox平台下,进行运动学建模与仿真,验证了其运动学正解和逆解的正确性。国外对于果蔬采摘机械的研究已经发展到了对采摘机器人的深入研究,自1983年第1台采摘机器人在美国诞生以来,经过多年的发展,以日本为代表的发达国家,相继实验成功了多种果实采摘机器人。20世纪90年代,日本岗山大学NAOSHI Kondo等[9]在番茄采摘机器人上设计出了具有7个自由度的能够制定采摘姿态的机械手。但对于冬枣果实来说,机器人采摘并不适应于大规模的运用。
当前,没有能够普遍适用于我国密集冬枣种植模式的机械出现,已有的技术,由于动力问题,以及体积质量等因素的制约,并不能推广实际应用。为此,根据人工采摘和机械采摘的优势,结合实地考察采集的数据,设计一种辅助人工的冬枣采摘收集装置,具有轻便、成本低、易操作等优点,能有效降低冬枣损伤率,提高采摘收集效率。
1 采摘收集装置整体结构设计
1.1 冬枣常规化种植间距及对装置设计要求
根据调研数据可知,冬枣树干的高度一般为2~2.5 m,而枝叶上的有枣高度一般为2.5~3 m,主干无枝高度为0.3~0.4 m。冬枣的种植间距并没有特别固定,但标准田中列间距为3 m,行间距为2~3 m,相近果树的树枝与树枝之间存在交叉,且大部分冬枣种植间距与此类似。枣树主干直径100~140 mm,次级干直径25~35 mm,三级干直径8~12 mm,只有三级树干上才生长有冬枣果实。枣园中的土壤质地较软,不适合重型机械作业。
根据枣树间距、枣树枝干高度等对采摘收集装置的要求可以总结如下:收集车的长宽需适合,能够自由进出枣林,收集伞面的高度设置和展开的宽度不能与邻近枣树产生干涉;采摘装置的长度要能够兼顾近处和高处的果实;因枣园地质较软,收集采摘装置整体重量需合理设计。
1.2 装置整体构造
1.2.1 采摘装置构造
根据采集的冬枣种植地数据,综合人工采摘和机械采摘的优势,既要考虑采摘效率,又要保障采摘的灵活性,设计了一种可伸缩振落辅助采摘爪,结构如图1所示。
由图1可以看出,驱动电机(3)安装于机械采摘爪壳体(1)内部的后半部分,通过直流驱动电机(3)的输出轴与偏心凸块(2)直接连接,偏心凸块随着电机输出轴旋转,从而起到将电机产生的振动放大的作用,产生激振力,辅助采摘作业。采摘爪俯视结构如图2所示,3个采摘爪采摘齿安装在机械采摘爪壳体的前方,其上有防滑套,防滑套之上加有成对的滚针轴承,可对采摘爪采摘齿起到轴向固定以及改变摩擦性质,将冬枣果实原本与采摘齿之间的滑动摩擦力转变为滚针轴承与果实的滚动摩擦力,能起到减小摩擦力的作用从而保护冬枣果实。采摘爪伸缩装置包括底部带螺纹的锁紧牙杯和下部带螺纹的锁紧外杆,通过伸缩装置的固定和锁紧,实现振动采摘爪装置的伸长和收缩。主要技术参数如表1示。
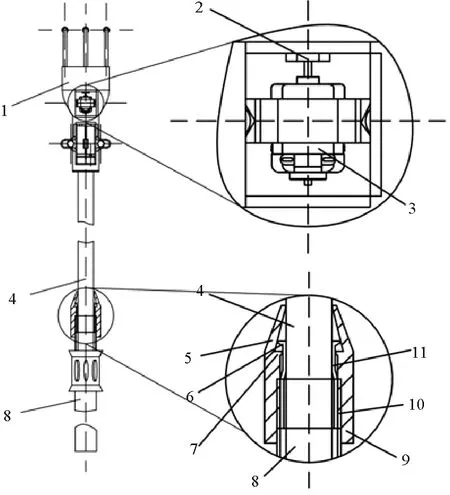
图1 采摘结构1—采摘爪壳;2—偏心凸块;3—驱动电机;4—前杆体;5—圆台段;6—倒钩型前端;7—凸台;8—后杆体;9—外螺纹段;10—内螺纹段;11—锁紧片
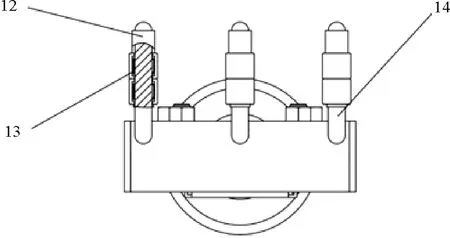
图2 采摘爪俯视12—防滑套;13—滚针轴承;14—采摘齿
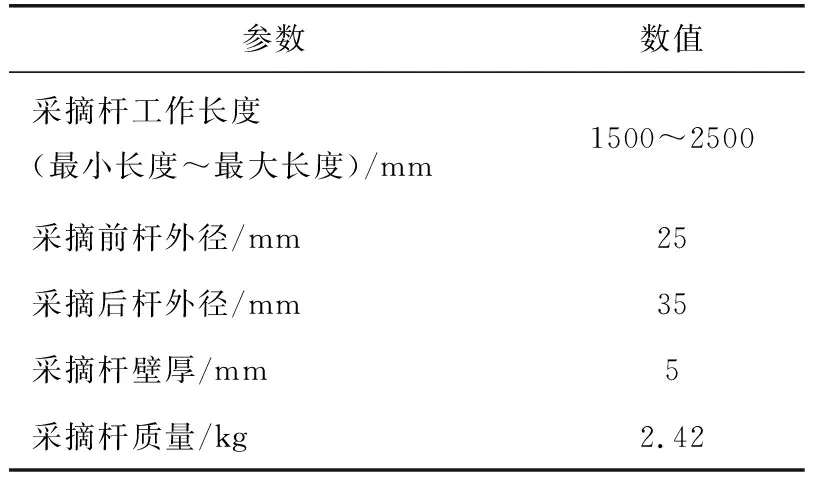
表1 采摘杆主要技术参数
1.2.2 收集装置构造
结合国内外资料,根据我国冬枣种植现状,设计了一种绳线拉伸式的伞面收集车,如图3所示。该收集车由绳线拉伸式伞面收集装置(19)、绳线拉伸式伞面(15)、连接推杆(16)、齿形缩紧装置(17)、车体(18)组成。考虑到控制车体质量以适应枣园软质土壤的情况,采用轻质铝合金金属,且在挠度校核合格的情况下采用空心结构。
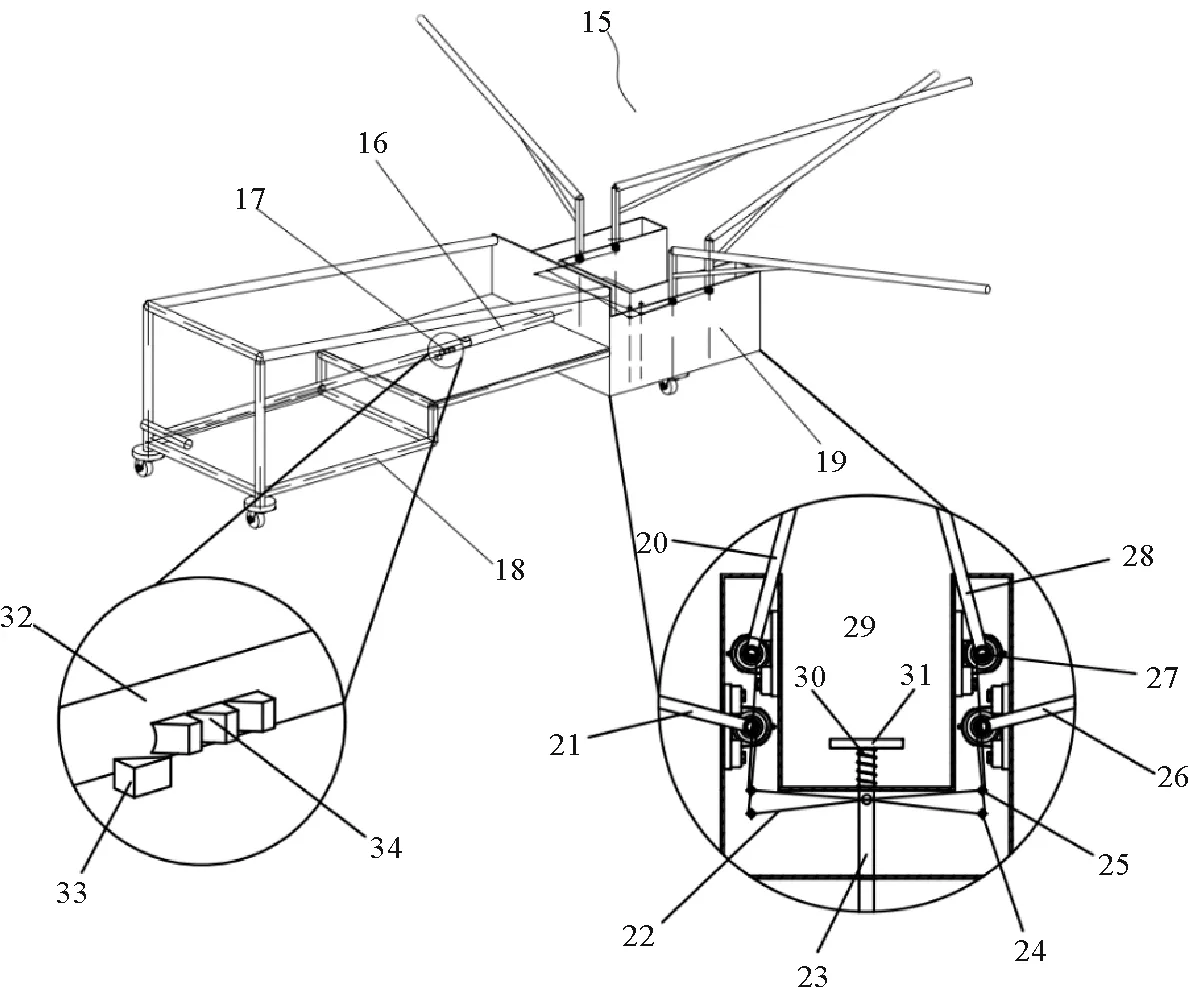
图3 收集装置15—绳线拉伸式伞面;16—连接推杆;17—齿形锁紧装置;18—车体;19—绳线拉伸式伞面收集装置;20—第1伞杆;21—第2伞杆;22—拉伸绳线;23—锁紧前杆;24—后挡杆;25—前档杆;26—第3伞杆;27—带立式座轴承;28—第4伞杆;29—凹型槽;30—弹簧;31—推杆头;32—锁紧后杆;33—卡块;34—斜块
绳线拉伸式伞面收集装置包括前箱体后部的前后档杆(24,25)、拉伸绳线(22)、伞杆(20,21,26,28)、带立式座轴承(27)、方形推杆头(31)、扭簧(其中扭簧穿过伞杆,图中认为伞杆和扭簧一体,不予标示)等部件。齿型锁紧装置(17)由锁紧杆上的斜块(34)和固定在垫板上的卡块(33)组成,推杆由前方的推杆头(31)、弹簧(30)、竖杆部分、锁紧杆(23,32)连接部分组成。锁紧杆连接部分采用圆形接触面,较矩形接触面,更方便于将推杆拨动,从而使齿形锁紧装置的斜块和卡块脱离,实现伞面张开状态的解锁。车体是由不同长度的杆件进行组装焊接而成,材料采用6061型铝合金,具有良好的焊接性能。齿型锁紧装置原理为在推杆被推到合适位置时与推杆头处弹簧产生的弹力平衡,使车体固定在相应位置,方便收集。主要技术参数如表2示。
表2 收集装置主要技术参数
1.3 一次采收过程工作原理
采摘人员将采摘车前箱体的凹槽对准枣树树干,推动收集车,绳线拉伸式伞面收集装置发生动作。收集装置中的拉伸绳线分为2股,每股分别控制2个可以转过相同角度的伞杆,2股绳线前端分别缠绕在2个扭簧上,其中2个扭簧分别套在左端的前后伞杆上。绳线后端绕过前箱体内部的左侧的第1、第2竖直伞杆,穿过推杆前竖档杆中的孔洞,绕过右侧的前箱体内部的第3、第4竖直伞杆,对右侧对应的前后伞杆上的扭簧进行绑结和缠绕。当收集车对准枣树树干推动时,与枣树树干直接接触的方形推杆头产生向后的位移,穿过推杆竖档杆的拉伸绳线会被带动相应的距离,从而拉动缠绕在扭簧上的拉伸绳线,拉伸绳线带动套在伞杆上的扭簧产生扭力,将前后两伞杆分别转过105°和195°,实现伞面从闭合到展开状态动作。
为维持伞面展开的状态,需要齿形锁紧装置发生动作。齿型锁紧装置由锁紧杆上的斜块和固定在垫板上的卡块组成,在推杆被后推到合适位置时,斜块和卡块相互卡紧,与推杆头处弹簧产生的弹力平衡,使得车体固定在相应位置,伞面保持在展开状态。至此完成伞面锁紧动作,下一步进行冬枣采摘工作。
可伸缩振落辅助采摘爪的采摘收缩装置包括底部带螺纹的锁紧牙杯和下部带螺纹的锁紧外杆。锁紧牙杯内部有凸台,凸台形状为直角梯形;锁紧外杆前部由4个锁紧片组成,锁紧片形状与锁紧牙杯内部形状相吻合,能够利用压力实现锁紧片的变形与伸缩装置的固定和锁紧。在需要将采摘杆伸长时,顺时针拧动锁紧牙杯,使锁紧牙杯和锁紧外杆脱开,调整采摘内杆的位置,使其伸长到所需要的长度;随后将锁紧牙杯套入采摘内杆,将锁紧外杆旋入锁紧牙杯中,逆时针旋转,卡紧使之固定,从而完成采摘爪的伸长。最后打开采摘爪前部的电机,偏心轮转动放大振动产生激振力,即可进行采摘作业,冬枣果实通过前部齿形结构的挂落和振动动作从树枝脱落,果树下固定的伞面收集车集中收集,完成一系列采摘收集工作。
2 具体部件设计和计算
2.1 电机选择及功率计算
在机械采摘爪的设计中,利用与电机连接的偏心轮产生激振力,使机械采摘爪能够产生振动。
在电机选用时,需要考虑的因素有:电机的尺寸要足够小且能够固定连接在采摘爪的下方。电机的类型应该为直流驱动电机,若为交流电机,则需要外接电源及电线,并且需要能将交流变成直流驱动的整流电路。此外,还需考虑电机的功率和电压,在设计中并不需要机械采摘爪产生太大的振动,因为机械采摘爪振幅太大,采摘杆长达1.5 m左右,力臂太长,会影响采摘的精度和稳定性,因此功率不宜过大,而额定电压方面,采用电池驱动,因此额定电压在3~12 V。
在机械转速方面,初选转速为n=4000 r/min,通过转速计算电机功率。设计中偏心轮和电机输出轴直连,随着电机输出轴的转动而转动。在此设偏心轮外半径为R=6 mm,内半径为r=3 mm,中心有一半径为r0=1 mm圆孔。估算偏心轮的质量大约为3 g。
将转动惯量计算公式拓展到偏心轮[10]的计算中,可得出适应偏心轮的转动惯量计算公式:
(1)
式中:IZ为转动惯量,kg·m2;m为质量,kg;R为偏心轮外半径,mm;r为偏心轮内半径,mm;r0为中心圆孔半径,mm。
将R,r,r0的数据代入式(1),可得到转动惯量IZ= 3.225×10-8kg·m2。
旋转力矩计算公式为
M=Jα
(2)
式中:M为旋转力矩,N·m;J为旋转体转动惯量,kg·m2;α为转动体角加速度,rad/s2。
角加速度公式为
(3)
式中:Δω为角速度变化量,rad/s;Δt为时间变化量,s。
角速度公式为
(4)
式中:ω1为初设电机转动角速度,rad/s;T为运动周期,s。
将n的数据代入式(4),可得ω1=418.88 rad/s。
假设电机能够将转速稳定到额定转速的时间为0.5 s,即Δt=0.5 s。将数据代入式(3)中,可得α= 837.76 rad/s2。
将所求得的转动惯量IZ和角加速度α代入式(2)中,可得力矩M=2.701×10-5N·M。
转动刚体的功率为
P=Mω1
(5)
式中:P为功率,W。
将上述数据代入式(5)中,可得P=0.0226 W。
功率、电压、转速都不是很大,因此从小型直流电机中选择,确定电机的额定电压为6 V,转速为7000 r/min左右。最终选择的电机型号为R300C,具体参数如表3所示。

表3 R300C型号电机参数
2.2 偏心轮尺寸设计及计算
在本机械中,偏心轮是产生激振力,使得机械采摘爪运动的核心部件。偏心轮安装在电机的输出轴上,从而在电机产生高速转动时,偏心轮也会随着输出轴而旋转。由于偏心作用,电机身会产生较大的振动,电机与底座固定连接,使整个采摘杆也会一起同频率振动,带动冬枣果实从树枝上脱落。
2.2.1 偏心轮偏振力计算
偏心轮材料选用具有中高等强度,中等韧性和塑性,综合性能较高,耐磨性和减振性良好,铸造工艺性能良好等特点的球墨铸铁。设计中采用的参数为:偏心块密度ρ=7.3 g/cm3,偏心轮厚B=4 mm,电机转速n=7000 r/min,偏心轮外半径R=6 mm,偏心轮内半径r=3 mm,中心圆孔半径r0=1 mm。
激振力计算公式:
(6)
式中:F为偏心轮产生的激振力,N;m为偏心轮的质量,kg;e为偏心轮的偏心距,mm;ω2为偏心轮的转动角速度,rad/s。
偏心轮的偏心距为计算激振力的重要数据,但由于偏心轮各不相同,随着实际应用情况可以改变形状,并没有统一的形状和计算公式。统计多种偏心轮形状,结合尺寸考虑,偏心轮形状设计如图4所示。
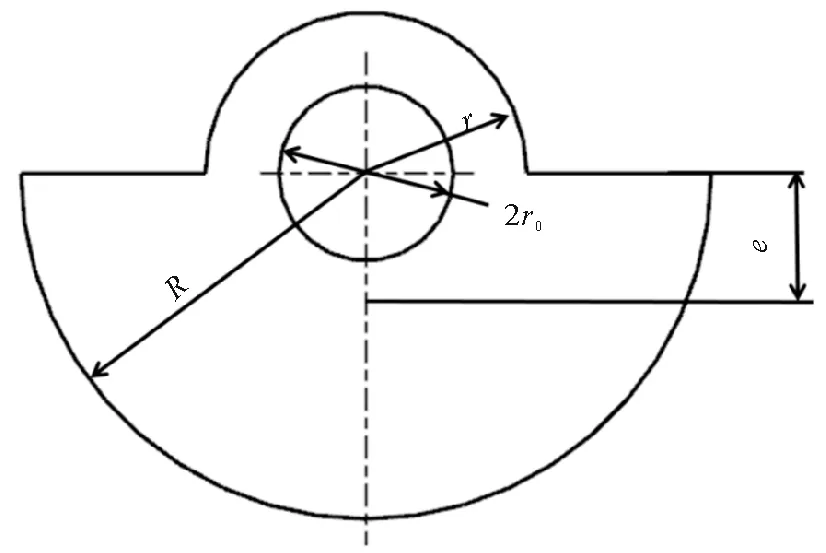
图4 偏心轮模型
在不同的形状结构下,偏心轮的偏心距和激振力的计算公式也不相同。根据资料搜集和推导[10],可得图4形状的偏心距公式如下:
(7)
根据转速和角速度的转换关系可得,当转速单位为r/min时,偏心轮转动角速度为
(8)
式中:n为电机转速,r/min;T为运动周期,s。
将数据代入(8)式中,可得ω2=733.03 rad/s。
根据偏心轮的形状,推算其体积公式和质量公式为
(9)
m=ρV
(10)
式中:V为偏心轮体积,cm3;B为偏心轮厚度,mm。
由式(6)—(10)可得,V=0.27 cm3,m=1.97 g=0.00197 kg,e=0.00186 m,F=1.96 N。
2.2.2 偏心轮的振幅计算
所求激振力F=1.96 N,其值并不大。但因在设计中,将电机和偏心轮安置在了机械采摘爪的头部位置,考虑到其质量和位置的特殊性,很小的激振力会对伞杆的末端产生一个较大的力矩,这个力矩太大会对采摘的定位产生干扰,故需要对激振幅度进行计算。
将人和采摘杆的模型简化为悬臂梁的模型,等效为一个集中力作用在靠近悬臂梁自由端的模型。
悬臂梁模型的挠曲线方程:
(11)
式中:w1为悬臂梁模型各点挠度变形量,mm;F为电机激振力,N;E为采摘杆杨氏模量,GPa;I为采摘杆截面对中轴的惯性矩,m4;a为载荷作用点到固定端距离,mm;x为所求挠度点到固定端距离,mm。
可求得该种加载情况下,最大挠度为
(12)
式中:wB为悬臂梁模型未固定端挠度变形量,mm;l为采摘杆长度,m。
机械采摘爪杆体的材料选用6061铝合金,其弹性模量E=68.9 GPa。机械采摘爪杆体的尺寸为l=1.480 m,a=1.385 m。
在求解惯性矩I时注意到,因偏心轮直接作用的矩形底面和后方圆柱形的机械采摘爪杆体结合在一起,形状复杂不单一,无法直接计算出偏心轮所能产生的振幅。故分别计算假设圆形和矩形截面极限情况下产生的挠度,求出一个挠度的范围,根据该范围确定是否合理。
依据惯性矩计算公式可知,当将载荷作用体全部简化为圆环截面时,其直径D=25 mm,d=20 mm。将上述数据代入式(12)中,可求得最大挠度wB≈1.23 mm。
当将载荷作用体全部简化为矩形时,矩形的长b=43.4 mm,高度h=5 mm。将上述数据代入式(12)中,可求得最大挠度wB≈15.4 mm。
该偏心轮产生的激振幅度在1.23~15.4 mm。该范围内的振动幅度较为合适,不会对采摘工作造成较大的干扰,也能够产生足够的振动辅助冬枣采摘。
3 结束语
根据沾化冬枣种植园实地生产种植情况,结合已有采摘机械,设计了一种振动式轻便冬枣采摘收集装置,由绳线拉伸式伞面收集装置、可伸缩振落辅助采摘爪、齿形锁紧装置等构成,其结构简单,操作方便,主要采用人力以驱动绳线拉伸带动扭簧旋转伞杆实现伞面展开,以齿形锁紧装置卡住斜块实现伞面和车体固定,用以收集冬枣。以微型电机驱动采摘爪产生激振力辅助人工采摘,具有实用轻便等优点。在我国冬枣种植园密集种植模式下,通过人工手持采摘机械采摘爪挂落,辅助以振动冬枣,通过可固定自锁的收集车上张开的柔性伞布对冬枣果实进行收集,能在保证较低损伤率的前提下有效提高冬枣采摘效率,有利于冬枣的采摘收集工作的快捷化,轻便化发展。
