城市水体表观污染线上检测系统的构建
2021-12-27戴天杰司壮壮
唐 毅,潘 杨,戴天杰,司壮壮,季 杰
(1.苏州科技大学 环境科学与工程学院,江苏 苏州215009;2.苏州科技大学 环境生物技术研究所,江苏 苏州215009;3.苏州科技大学 城市生活污水资源化利用技术国家地方联合工程实验室,江苏 苏州215009)
伴随着我国工业化和城市化步伐的加快,城市水体普遍面临污染严重、感官恶劣等问题,蓝藻、黑臭现象时有发生,城市水体的功能和作用逐渐转化为纳污、泄洪和景观用途。良好的表观性状已经成为人们对于城市水体的基本要求[1]。
水体表观污染是指外界污染物在进入水体后,受到物理、生物、化学等多种迁移转化过程的影响,加上水力条件,气象因素等外部环境的作用,水体呈现出悬浮物增多,透明度降低,灰黑等颜色异常,散发出刺激性气味等破坏生态质量,影响人居环境的不良表观性状[2]。通常所说的“黑臭”和“藻华”就是最显著最负面的表观污染现象。经研究发现,非溶解性污染物是造成城市水体表观污染的主要因素[3]。
基于吸收光谱表征的城市水体表观污染评价方法是本课题组独创的研究方法。城市水体表观污染评价方法里在具体表观污染指数的计算过程中,水体颜色的判断采用的是评价人员基于人眼的现场判别和文字描述的方法。这种方法不可避免的会产生主观性和个体差异性从而影响所测定表观污染指数的准确性,使表观污染指数法不具有充分的客观性,同时也限制了表观污染指数自动测定技术和线上测定技术的发展。
本文基于表观污染指数法(Sensation Pollution Index,SPI)对于不同水体颜色的定义,以苏州市城市景观水体为研究对象,利用计算机视觉技术,自主开发颜色识别系统,将主观判别转化为数字化表述,并通过识别的颜色空间特征值(HSB值:色度、饱和度、亮度),构建颜色判别模型,实现了颜色的自动化分类判别。进而解决了表观污染指数自动化测定的关键技术难题,通过网络环境部署,最终实现表观污染指数的线上检测。
1 材料与方法
1.1 SPI方法
城市水体表观污染评价方法可以对水体表观变化做出客观评价,记载水体表观质量的变化过程,科学阐述表观污染现象的发展历程,定量化表征污染效应,评估城市水环境表观污染现状及城市水环境修复工程成效,为污染控制策略和针对性技术措施的研究提供更为直接的依据和思路[4]。该方法于2015年纳入中华人民共和国住房和城乡建设部《建设部黑臭河道工作指南》。SPI的计算公式为

式中,SPI表示表观污染指数,x表示水样过滤前后吸收光谱扫描曲线的围合面积,β表示颜色修正系数。在计算的过程中,需要通过人工判别将水体颜色划分为四个不同的色系,并根据不同的水体颜色,赋予不同的修正系数β。

表1 水体颜色修正系数β
2017—2020年,运用该方法对苏州城市水体表观污染质量进行了评价,验证了SPI方法可以从不同层次对水体进行分析评价,具有较为灵活的评价方式,能够科学地阐述表观污染现象的发展变化过程,评价水体修复工程成效。
1.2 颜色客观识别方法
原有SPI方法在指数计算的过程中,需要通过观测人员的主观判别和文字描述的方式,获取颜色修正系数。方法采用了多人判别,综合评价的方式,使判别尽可能客观,但是由于观测人员的个体差异,天气、环境、心情等因素的影响,使得判别存在差异,判别的客观性不够充分。通过照片拍摄、色彩还原、颜色提取的方式,可以有效的解决上述主观判别的误差。
城市水体照片的拍摄是在户外开放环境,受光源、环境、背景等多方面因素的影响,必然会产生色偏,单纯的现场照片并不能真实传达客观的色彩信息,影响了水体颜色的识别和判别。因此,必须在颜色识别之前,对拍摄的照片进行色彩还原。
色彩还原的方式和算法有很多种,对比色校正,灰板校正、CCM算法、查找表法等[5-7],其中24色色卡校正较为简单,容易实现。本研究采用的是datacolor公司Spydercheckr24色标准色卡,通过提取照片中色卡中色块的颜色值与色卡颜色的标准值之间的关系,确立颜色还原矩阵,实现色彩还原。
因为拍摄条件是在自然光条件下,由传感器自身造成的色差并不是很大,因此,色彩还原矩阵应该接近单位矩阵,其中各个元素的值应该保持在1.0或者0.0附近。在这种情况下,可以采用迭代的方法,产生一个色彩还原矩阵集合Sc。如a11=1.0+0.02x;a12=0.0+0.02x;a13=0.0+0.02x,其中x=0,1,2,…,24,25。这样对于向量VR=(a11,a12,a13)就有263种取值可能。同理,可以迭代出VG,VB。对于VR,VG,VB(VR、VG,VB分别代表RGB颜色分量的取值)的任意一种取值都可以组合成一个色彩还原矩阵C,所有组合出来的矩阵构成色彩还原矩阵集合Sc。将所有可能值与各色块对应的标准值做方差

方差最小的对应矩阵即为最佳的色彩还原矩阵C。最后使用这个色彩还原矩阵来修正整个图像的色偏,使图像的颜色更接近于真实颜色[8]。色偏修正的公式如下

式中,C为色彩还原矩阵,R、G、B为原始图像中的颜色值,R'、G'、B'为色偏修正后的图像颜色值。通过多项式拟合的色彩还原方式相对比较“简单粗暴”,有一定的误差,但是不影响以定性分析为基础的颜色分类判别。
颜色还原后提取的水面颜色才能反应真实的水面颜色。兼顾后期的集成运算,选择默认区域为横向1/2纵向1/3处为中心点的200×200像素区域平均值,提取HSB色彩空间的颜色值做为颜色判别依据。HSB色彩空间模式是描述人的视觉对自然界光线颜色感觉的模式,与人体感官的匹配最直接。
1.3 拍摄约束条件
以苏州城市水体为例,通过课题组在不同光照条件下,不同角度、不同距离多次反复的拍摄与测试,建立了能够被颜色识别系统有效识别的照片拍摄约束条件。
拍摄用相机需要保证2 000万像素及以上(本课题组使用的设备是佳能单反550D),选择自动白平衡模式。色卡置于平静水面上,拍摄时选择光圈优先模式,自动对焦色卡区域,拍摄时镜头距离水面约2~3 m,不得超过5 m,正对水面接近垂直方向拍摄(完全垂直拍摄会受倒影的影响)。取景范围必须包含完整清晰的24色色卡(使用不同的色卡模型需要先在识别系统里建模),且避开倒影,避免光线太弱或太强(光强不得小于8 000 Lux,不得大于20 000 Lux)。在拍摄取景时,需要考虑取景范围的横向1/2处和纵向1/3处为默认提取颜色范围区域,该区域需要能够代表水体颜色的特性,避免波浪、倒影、树叶等其他物体的干扰。
2 分析与应用
2.1 颜色判别模型建立
颜色判别依据的建立是基于城市水体表观污染指数SPI方法,采用颜色优化模式,将水体颜色划分为绿色、黄色、灰色和黑色四个色系[9]。绿色系是指水体表观状况良好,水体呈现清澈、纯绿;黄色系是指水体颜色呈现黄色,包括土黄、黄绿等;灰色系是指水体颜色呈现灰色,包括灰白、灰绿、灰褐等;而水体颜色中带黑色,包括黑、灰黑、黑绿时均归为黑色系。以苏州城市水体为例,在23个采样点不同时间段进行拍照采样,采集到有效样本数据627个,其中绿色水体117个,黄色水体191个,灰色水体272个,黑色水体47个。
通过对水体颜色的HSB值进行梳理分析,色偏修正后对水面颜色信息提取可以通过水面亮度(B)值将黑色水体和其他三种颜色的水体区分开(见图1),黑色水体的亮度值均小于30,其他三种颜色水体中仅有7个样本的亮度值小于30。

图1 黑色系区分图
这是由于光照进入水体后,黑色水体吸收系数较大,吸收的光比其他三种色系水体多,导致黑色系水体水面的亮度值偏低。因此黑色水体的判别条件为B≤30。经过分析得知,7个亮度值小于30的其他颜色样本,拍照时的照度均小于8 000 Lux。
黄色水体通过饱和度(S)和色度(H)可以与绿色和灰色水体中区分开(见图2),有90%的黄色水体饱和度大于20且色度小于80。这一现象符合高饱和度下以色度来区分颜色的HSB原理。
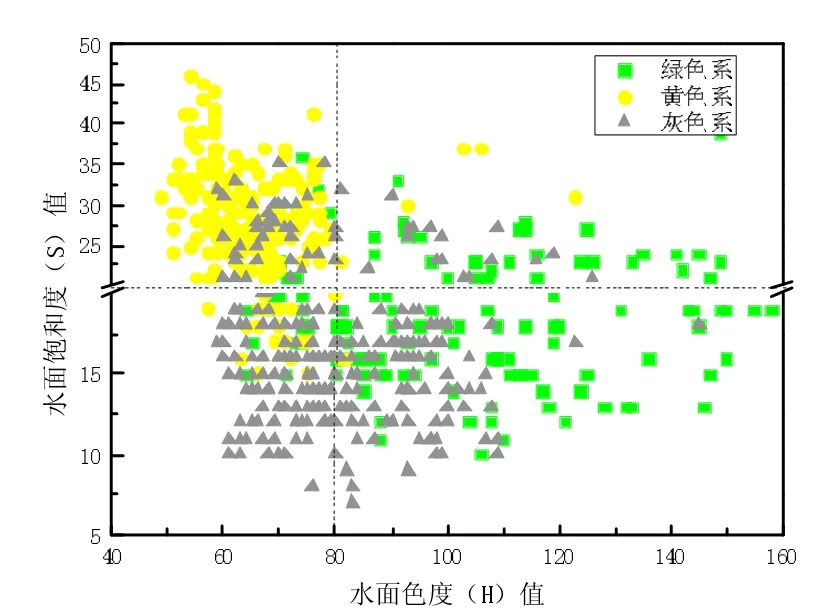
图2 黄色系区分图
模型颜色呈黄色水体的判别条件为B>30、S>20且H<80。
灰色水体多呈现出低饱和度,有81%的样本饱和度低于20,而其色度值在60至130之间,离散程度较高,与绿色水体和黄色水体没有显示出明显的界限,这也符合饱和度较低时,颜色普遍呈现灰色,色度值不具备区分颜色功能的原理。绿色水体主要可以分为两部分,39%的绿色水体饱和度大于20,色度值在80至150之间;61%的绿色水体饱和度小于20,与灰色系水体的区分度不高。根据SPI中判断绿色水体的定义,水体呈现纯绿或者清澈时则记为绿色系,其中清澈的定义会导致绿色水体样本中存在大量的清澈水体,这部分水体在颜色呈现时可能会出现饱和度较低的现象。因此,再引入浊度信息来进一步区分清澈的绿色水体和灰色水体(见图3),对于浊度大于15的水体,不满足绿色水体清澈的定义,所以都归类为灰色水体,最终建立了水体颜色判别模型。
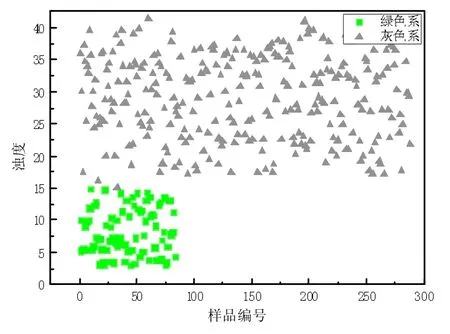
图3 绿色系区分图
通过水体颜色判别模型(见图4),对于色偏修正后的水面颜色信息HSB值,先通过B值判定是否属于黑色水体,再根据S值区分具有较大颜色信息的水体和较小颜色信息的水体,在较大颜色信息水体中根据H值区分绿色水体和黄色水体,在较小颜色信息水体中根据浊度值区分清澈的绿色水体和灰色水体。
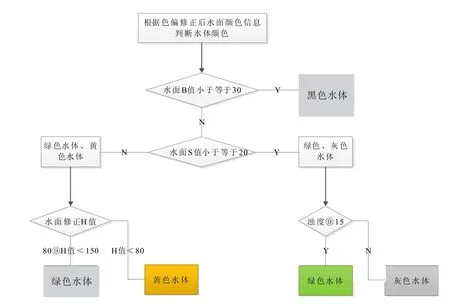
图4 颜色判别模型
2.2 颜色判别吻合率验证
为验证颜色判别的吻合率,课题组另外选取了苏州城市河道91组水样、江苏盐城、江西赣州、江苏常州、黑龙江大庆共计64组水样进行了颜色识别系统和人工判别的验证。通过验证结果可知,系统识别的方法与实际主观判别结果基本一致,绿色水体的吻合率为88%,黄色水体的吻合率为93%,灰色水体的吻合率为86%,黑色水体的吻合率达到了100%(见图5)。

图5 颜色判别吻合率验证
2.3 城市水体表观污染线上检测系统
城市水体表观污染线上的检测系统是在颜色自动识别和判别基础上建立的线上检测系统。考虑到线上用户的非专业化背景和网络环境的安全性要求,采用了自动化的操作界面,删除了交互操作的部分,不需要让用户自行进行颜色识别的建模,只需保证上传的现场照片完全符合拍摄约束条件(包括模型也与样例一致),即可直接进行颜色的识别和分类判别,进而获得检测结果。
导入的滤前滤后扫描文件是以最常用的分光光度计标准输出文件格式为基础建立的。包含了仪器版本,日期等信息,扫描数据结果以每5 nm为单位记录吸光度值,从380~780 nm,包含了所有可见光波长范围。
经过测试,从照片导入、文件导入开始,到SPI值的最终生成,用时约12 s。
2.4 城市水体表观污染线上检测系统吻合率验证
根据SPI公式计算出来的城市水体表观污染指数将表观污染状况分为5个等级,SPI低于10表示水体表观质量好,10-25表示较好,25-45表示尚可,45-70表示较差,SPI大于70表示差。
原有SPI方法,在2014年进行的分级结果与普通公众的吻合度测试中,完全吻合率达到了55%,基本吻合率(偏差±1级)达到了93%[13]。通过表观污染指数线上检测系统计算的SPI值与原有线下方式计算的SPI值进行了对比分析,以构建颜色判别方法的627个样本为例,线上通过颜色识别计算的SPI值与线下通过主观判别颜色计算的SPI值比较,计算差值在±1以内的比例达到了89.6%,如果按照SPI的表观污染状况分级标准,分为五个等级,则等级划分吻合率超过90%。图6为SPI线上检测系统操作流程图。

图6 SPI线上检测系统操作流程图
3 结语
研究结果证明,颜色识别系统的颜色判别与人眼判别的吻合率较高,平均吻合率可以达到89.6%,具有较高的准确性,可以替代现有方法进行城市水体表观污染的评价。
通过城市水体表观污染线上检测系统,可以在线上、以定量的形式表征城市水体表观污染程度,实现了客观、便捷、环保、高效的城市水体表观污染评价,对于城市水环境预警、水生态修复、水污染治理工程效果评价等都能够提供评价支撑。城市水体表观污染指数系统技术链条的完整构建,有望在不远的将来实现现场检测设备的研制,为SPI的进一步推广提供坚实的基础。
