基于Smart3D的三维实景建模应用研究
2021-12-26李见涛何昌国
李见涛,何昌国
(江西省煤田地质局测绘大队,江西 南昌 330000)
三维实景建模技术能够根据一系列二维相片,或者一组倾斜影像,通过软件自动生成高分辨、带有逼真纹理贴图的三维模型。传统的三维建模虽然分辨率高,但是有耗时较长、制作烦琐、场景不够真实等缺点。而利用倾斜摄影技术进行的三维实景建模具有建模时间短、更加智能化、场景更加真实等无可比拟的优势[1]。
本文以深圳市某校区为例,通过大疆 Inspire2无人机获取区域内的高精度图像,然后通过相关的软件完成三维实景模型的建立,最后通过对其精度的认定来论证此方案的可行性。
1 基本原理与关键技术
1.1 倾斜摄影基本原理
倾斜摄影通过多角度的搭载不同的高清摄像头,完成垂直以及四个倾斜多个方位对物体的实时动态拍摄,采集二维相片,从而能够获取到更加丰富的纹理信息,为用户提供一个更加直观真实的视觉。使飞机在飞行过程中,能获取多角度多方位的影像数据,针对目标区域可以全面覆盖。对于所有曝光位置来说,通过多个不同的镜头就可以同时拍摄多个不同角度的影像[2]。
在拍摄影像时,对拍摄的各个参数,包括高度、经纬度坐标以及时长进行记录,形成POS文件,并完成数据处理。获取到的倾斜以及正射影像(DOM)可以更加全面覆盖满足建模需要的所有区域, 为三维建模奠定基础。
1.2 三维实景建模技术流程
利用倾斜航摄相机对目标物进行拍摄,获得需要的影像数据,其特点有:①从多角度多位置进行拍摄,能满足模型多个角度的生成;②搭载的摄像机能够实时拍摄,从而保证了图像的清晰度和广阔的视角;③由于拍摄角度的缘故,会发生部分物体被遮挡的现象。可能会造成模型局部出现变形或者看不清的现象。但是可以通过后期Smart3D补拍重建模型或者用相关软件进行精细化处理。
如图2所示,三维建模涉及获取、预处理、空三处理以及建模等主要步骤。其中关键的步骤在于空中三角测量自动生成三维模型和纹理映射,此步骤依靠Smart3D软件半自动完成。
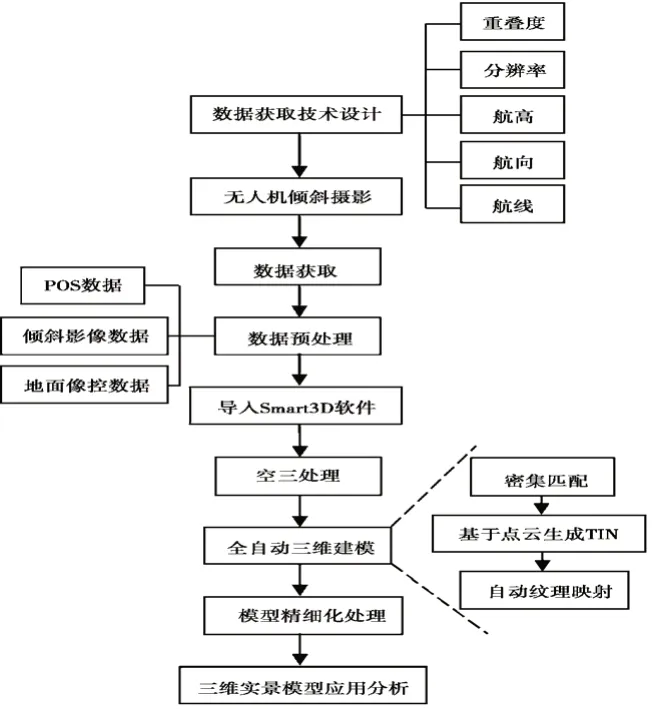
图1 技术流程图

图2 测区航线设计图
1.3 基于Smart3D 的三维实景建模
本文利用 Smart3D 软件来构建三维模型,该软件的最大特点是通过加载二维相片影像就可以自动化快速的实现三维实景模型的建立,而且可以输出类似obj、osgb、dae、spk等多种格式,自由导入诸如ArGIS、Qgis等主流的GIS平台中,可输出的模型包括DSM.DOM DEM以及二三维可视化数据[3]。而且Smart3D还可以用于文物保护一些零件的三维模型的构建,而本文主要阐述基于无人机航拍影像完成实景三维模型的构建和在可视化与分析中的运用。
2 三维建模过程
2.1 研究区概况
本文研究区域学校位于深圳盐田区,研究区覆盖建筑楼以及体育运动场所,容积率较高,面积较大,下图是根据研究区域的航线设计图。
2.2 无人机数据获取
构建实景三维模型原始数据主要包括了无人机拍摄的倾斜影像数据、POS 数据、以及地面像控点。此次实验采用大疆 Inspire2无人机搭载禅思Zenmuse X5S相机对倾斜影像数据进行采集,时间定在9月初天气晴朗,基本上没风,比较适宜飞行。
首先在无人机地面控制系统中进行航线规划,设高度航向重叠度等基础参数。本次航飞获取了590张倾斜影像,影像的的精度达到了2cm。我们选用的控制点数量为4个,采用GPS-RTK模式联测出平面及高程坐标,测量三次取平均值作为最终结果,控制点选用坐标系统为大地CGCS2000坐标系,1985国家高程基准。
2.3 Smart3D建立实景模型
倾斜影像的数据类型有两种,分别是大倾角侧视摄影数据和垂直摄影数据。每个曝光点的坐标,可以通过倾斜摄影瞬间 POS 系统的观测值,作为其初始外方位元素,进而根据模型进行计算得出。采用多基线多特征匹配技术可生成大量的连接点,结合少量的外业控制点,通过区域网平差步骤,从而完成了多视角联合空中三角测量,最后得到精确的空三匹配结果。
2.3.1 数据预处理
数据预处理主要是对数据的检查和校正,首先是对影像坐标系的检查,是否是CGCS2000坐标系,影像是否清晰。其次就是对于采样的像控点的精度是否达到要求,导出的POS数据是否正确。确认无误将POS数据保存为.scv格式,而像控点保存为.txt格式。
2.3.2 空中三角测量
多视影像密集匹配可以获得密集点云,再经过优化构网算法来构建数字地表模型(DSM),从而为后面构建模型提供数据支撑。在倾斜影像运用空三算法获得各个影像的外方位元素,通过其像素以及特征进行匹配,加上并行算法的运用,从而提升计算速度。基于上一步获取到的数字地表模型融合,得到一致的DSM。此过程通过Smart3D软件自动完成,我们将POS数据导入进来,选择对应坐标系,即可一键生成相应空三成果。成果图如图4所示。
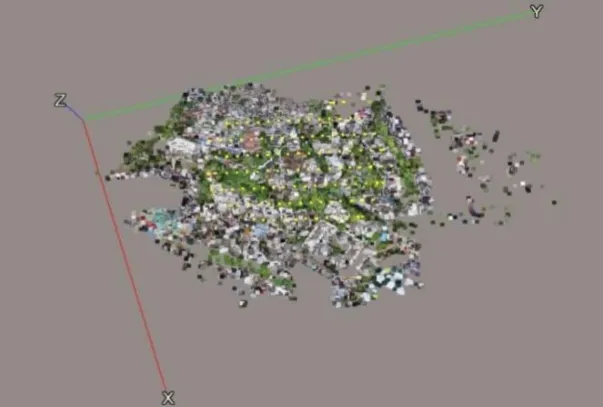
图3 空三成果图
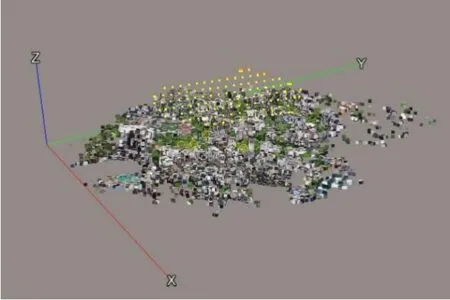
图4 像控点加密空三测量报告
2.3.3 像控点加密
工程准备完成后进行空三加密。软件会自动对图片进行大量特征点的计算提取,完成建模坐标系的转换。在Smart3D中选择加载像控点,并以刺点的方式表明。最后将空三成果导入构建的坐标系中,并输出各个像控点的精度相关的信息。表1是像控点检测报告。图5是像控点加密空三测量成果。

图5 校园三维模型成果
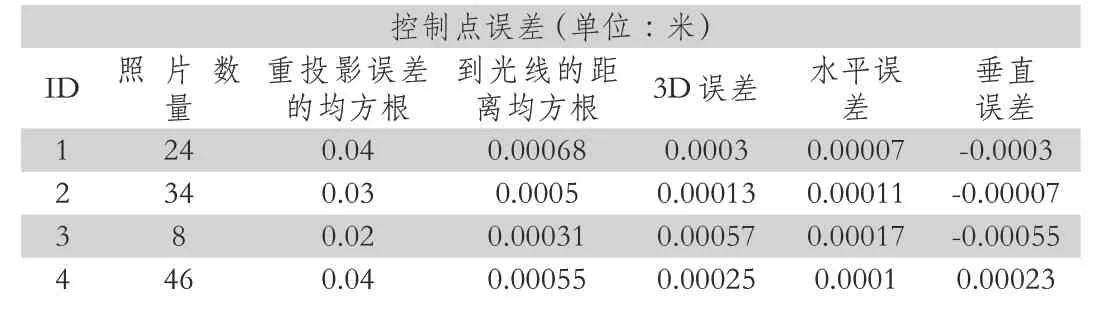
表1 像控点检测报告
2.3.4 建立模型
通过Smart3D进行半自动化建模还需要以下3步:通过上述空三加密点云计算不规则三角网TIN,即可生成白膜;从飞来的航片中选择合适的纹理进行贴膜,最后在输出模型。本次实验瓦片数量42,大小60米。模型成果见下图所示。
2.3.5 三维模型精度评定分析
根据三维模型相关规范要求,从平面精度、DOM精度、模型精细度和纹理等多个方面进行评估表述。
(1)平面精度:平面精度以平面中误差为指标,通过在校区内用RTK打15个特征点,作为精度的检查点,在模型测出这些点坐标,根据中误差公式计算,验证是否符合规范。经计算得到此模型的精度为0.04m,远高于1:1000测图下模型精度0.8m的要求。
(2)高程精度:高程精度通过对校园建筑物高度进行分析。在校内选择15座建筑物,测量其实际高度,与模型量测数据进行比较并计算出高度中误差。经计算模型高度中误差为0.148 m,符合规范中1M的要求。
(3)DOM精度:此次三维模型地面分辨率为0.04m,符合规范要求。
(4)模型精细度:模型精细度主要从建筑要素模型、植被要素模型以及管线地下空间要素模型等方面来参考评定。本次生产的校区模型,主要涵盖了校园内部的建筑表现、地形起伏变化以及细节表现,满足I级模型,但是表现不了地下空间特征。
(5)纹理主要通过已经拍摄的照片和补拍一些不清晰的区域照片,并对照片进行处理,从而修饰模型的纹理。本模型达到了I级模型的纹理精度要求。
3 结语
本文基于 Smart3D 的三维实景建模方案的设计,在无人机倾斜影像的基础上构建校园三维场景模型,而且模型精度远超于的单镜头航测模型精度,具有较高的实际应用价值。此成果通过可视化和分析为校园虚拟规划提供依据的同时,还能为构建校园三维GIS平台提供支撑的数据。
