无人机测控通信系统中智能天线技术分析
2021-12-24王月黄玉玲
王月 黄玉玲

【摘要】 近年来,无人机的出现与应用得到了良好的发展前景,但在实践应用中,无人机测控与信息传输系统中,其地面设备缺乏灵活性,同时其跟踪速度也非常慢,无法满足实际需求。针对此,本文提出了智能天线技术,就是将智能天线用作地面设备的天线,而后通过搭建测控通信系统仿真模型,及其算法设计,而后根据仿真结果,验证了智能天线技术的应用,在极大程度上提高无人机的精确跟踪能力,同时,也使得有用信号信噪比得以提升,提高了抗干扰性。
【关键词】 无人机测控通信系统 智能天线 仿真模型
引言:
科技、经济的发展,为我国探索空天信息提供了充足动力,而无人机的出现和应用,为民用、军用等领域发展注入了新鲜血液。无人机体积小、灵活、成本低、具有较强的隐蔽性,使得成为了众多领域的新星。但是无人机测控通信系统在实践应用中却表现出了一定的缺陷,设备灵活性低,难以实现高速追踪,直接影响了无人机的应用范围及前景。所以,针对无人机测控通信技术的研究,应当以小型化、轻量化为主,全面优化无人机测控通信设备,从而为无人机测控通信领域发展提供充足动力。
一、智能天线技术
智能天线技术起初主要应用于军事领域,比如雷达、声纳。而现代社会的发展,推动着移动通信技术不断发展,基于互联网背景下,网络用户数量的日益增多,对网络体验的要求和需求也发生了巨大变化。在此背景下,移动通信领域引入了智能天线技术,并在实践中取得了良好的成效,进一步助推了移动通信技术发展。而将智能天线技术引用到无人机领域中,也体现出了很大优势,与传统无人机测控通信系统相比,引入智能天线后的地面测控传统,精度高,具有较强的灵活性,可以实现快速追踪,与传统伺服天线相比体现出了极大的优势,此种无人机测控通信系统将由于体积小,可以安装在车顶上,将其应用到应急通信、抢险救灾等领域,发挥了重要作用。分析智能天线技术可知,其主要引用了阵列信号处理技术,该技术可以完成对多个波束的指向,这一特点使得无人机实现一站多机、无人机自组网等功能,这对于军用方面发挥了巨大作用。除此之外,也可以将智能天线应用到机载端,体现出了非常明显的增益性。
二、无人机测控通信系统模型
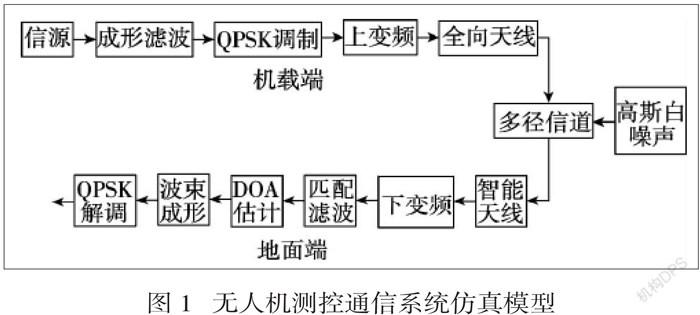
无人机测控通信系统仿真模型的构建,如果机载端选用全向天线发射,而地面端使用智能天线进行接收,将阵元数设定8。整个运行过程如图1所示,机载端产生信源,这里的信号源主要就是随机生成的伪随机序列,而后通过成形滤波后,转换为带限信号,在此基础上再经过QPSK的调整,“QPSK”( Quadrature Phash Shift Keying,四相相移键控),将信号转换为符号后进行正交上变频,最终由天线向外发射[1]。
发射出来的信号会通过多径信道,此时,信号会和高斯白噪声进行重叠,经过此过程后的信号会被智能天线进行接收。此智能天线属于垂直极化方式,阵元间距为0.5个波长、阵元8个。而后该信号会进行正交下变频处理,这一过程主要转变为基带信号,此时,在半带抗混叠低通滤波器的作用下进行滤波匹配,主要的目的就是更好的接收信号。如图1所示,DOA( Direction Of Arrival,波达方向)估计与波束成形,主要在地面端,其中DOA估计所使用的算法是“MUSIC” ( MU1-tiple Slgnal Classification,多重信号分类)。MUSIC算法与以往传统的空间谱估计算法相比,在估计方面体现出了更高的精度,此外,还可以很好的对信源数量进行估算。而波束成形算法,主要利用的建立在LCMV准则的方法。经过这两个步骤后,最终经由QPSK对信号实施相应的解调,进而完成信号发射[2]。
三、算法设计
3.1波束成形算法
波束成形的算法包含了很多,主要分为三大类:第一类为“Max-SINR”准则,即最大信干噪比( Max-Signal to Interference and Noise Ratio)[3];第二类为“MMSE”准则,即最小均方误差(Minimum Mean Square Error);第三类准则为“LCMV”,即线性约束最小方差(Linearly Constrained Minimum Va-riance),虽然属于三种不同的准则,但这三者的关系属于等价的,都代表了维纳最优解。但这三种算法在实践应用中,所需条件不同,其中MMSE准则算法的实现必须加入参考信号,容易出现浪费时频资源的情况,而选择Max-SINR准则的前提是要获取到已知噪声信号的方差,显然,现实条件是无法满足的。相比之下,选择LCMV准则的算法,只要获取到信号来波方向便可进行操作,通过DOA估计便可获取,整个算法非常简便。通过对比、研究后,最终选用LCMV准则的波束成形算法较为适宜[4]。简单说,基于LCWV准则的算法,主要就是指在保证有用信号输出稳定不变的情况下,实现最小化输出总功率。
3.2 DOA估計算法
分析无人机实际飞行情况,不难发现,其飞行速度较快,同时,对链路具有较高的要求,由于其上下行速率不对称的特点,因此,选择MUSIC算法较为适宜,这种算法具有较高的分辨率,能够针对不同来波方向进行实时估计,这一特点,足以满足其跟踪高速移动的目标的需求。需要注意的是,在这种较大运算需求下,应当充分发挥FPUA(现场可编程门阵列)、数字信号处理技术的作用,利用CORDIC(坐标旋转计算机)IP核,可以很好的发挥MUSIC算法作用。与此同时,MUSIC算法本身较高的分辨率,可以在很大程度上保证指向准确度,进而极大的提高链路的安全性、稳定性。无需参考信号便可实现对信号的来波方向、信源个数的估算,这不仅很好的节省了时频资源,同时,也极大的保证了下行数据速率[5]。
四、仿真结果
本次研究构建的无人机测控通信系统仿真模型,其仿真条件如表1所示。
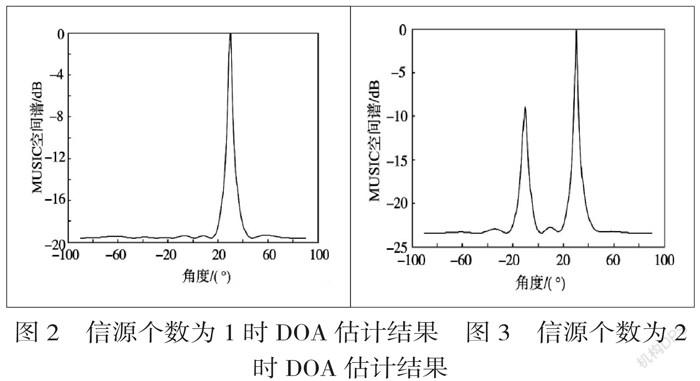
在仿真研究过程中,分别选择了信源个数为1,角度为30°,以及信源个数为2,角度为30°和-10°两种情况进行仿真,结果如图2、图3所示。
由图2可知,运用MUSIC算法,在信源个数为1时,得到的DOA估计结果,当信噪比保持-2dB时,估计出的入射信号角度为30°,这与前文假设保持了一致。而图3的信源个数为2,从对应的DOA估计结果看,本方法能够较为精准地分辨出信源个数,与传统MUSIC算法相比,体现出了极大的优势,解决了以往产生相干信号失效的问题[6],与此同时,得到的估计角度,即有用信号30°,多径信号-10°,验证了假设。
而针对波束成形算法,在本次研究中,主要选择了基于LCMV准则的算法。采用此方法实施仿真验证,主要的原理就是利用了之前得到的DOA估计结果,进而获取到最优权值,分析后,发现和理论分析结果一致。需要注意的是,为了避免出现因为通道不一致而直接影响到DOA估计准确性的情况,需要预先对通道实施校准,对比未校准与校准后的DOA估计结果,不难发现,在没有进行校正前MUSIC算法已经无法发挥作用,所以,无法进行有用信号、多径信号的估计。而经过校准后,则很好的完成信源个数和方位角的估计。
五、测试分析
为了进一步验证上文提出的理论分析和仿真结果的正确性,下面主要通过实际试验进行验证。通过实测得到数据,而后将这些数据以描点法绘制出对应的智能天线方位面、俯仰面方向图,其中波束指向为90°,通过智能天线系统软件显示界面最终获取到实测结果。在该无人机地面通信系统中,地面设备主要由电脑、收发信机组成,其中机载端发送的数据会被收发信机直接接收,而后向电脑端进行传送,电脑接收到数据后,Matlab会计算出DOA估计结果和波束成形需要的权值,得到的计算结果会直接发送到地面收发信机中。
由于实践中多径的影响,本次研究针对此进行了优化调整,主要方法就是进行多次DOA估计,汇总估计结果后去除两端数据差较大的,日后取平均值用来进行波束成形,这样可以很好的降低多径影响,从而最大程度上保证DOA估计的正确性。从本次实验的最后一次DOA估计结果看,为28.50,与GPS (全球定位系统)数据测得的结果存在一定的偏差,但不大,而波束成形算法下所得方向指向了30.5°,由于是多次实验所得数据,所以与真实值要更加接近,充分体现其估计的准确性优势。
六、结束语
综上所述,随着无人机在各个领域的应用和发展,深入研究无人机测控通信技术已经成为了推动其发展的重要方向。本文结合智能天线,遵循无人机特点以及实际发展需求下,构建了地面设备智能天线测控通信系统,通过分析智能天线原理,借助仿真实验,验证了这一方案的可行性,根据外场实际测试结果看,采用智能天线技术,有助于进一步优化无人机测控通信系统,使其更为广阔的应用和发展。
参 考 文 献
[1] 曹海. 海洋广域无人机智能天线技术应用研究[D]. 国家海洋技术中心,2018,38(23):123-124.
[2] 许强, 赵雪, 张志芳,等. 无人机测控通信系统中智能天线技术[J]. 飞行器测控学报, 2017, 036(004):274-280.
[3] 孟祥宇.无人机测控通信系统中智能天线技术分析[J]. 科學与信息化, 2020, 023(001):P.29-29.
[4] 胡一博. 基于IMT-Advanced的3D MIMO信道建模[D]. 厦门大学, 2018,12(23):190-193.
[5] 周定宇. 无人机测控新体制的关键技术研究[D]. 南京航空航天大学, 2017,45(34):100-101.
[6] 吕晓林. TD-SCDMA技术在无人机测控系统中的应用研究[J]. 无人机, 2018, 034(001):P.28-29.
