智能控制桥臂的起重机防摇系统设计
2021-12-24刘佩霞范艺凡向春妮郭天汭闫明珠
刘佩霞,范艺凡,向春妮,郭天汭,闫明珠
(河南科技大学信息工程学院,河南 洛阳 471009)
0 引言
近年来,随着世界各国贸易互通往来频繁,货箱的运输成为了重要的一环。在货物的装箱、搬运过程中,起重机起着重要作用。桥式、门式起重机广泛用于机场、码头、工厂等大型运输场所[1]。由于起重机的位移装置和货物之间的连接多以钢丝绳为媒介,操作熟练度、钢丝绳的柔性、风力等多方面因素会导致货物在运送过程中产生摇摆[2]。起重机防摇就是使吊起货物快速消除摆动,尽快达到竖直状态,以加快货物运输的准确性、快速性,从而提高货物的装卸效率,减轻工作人员的劳动[3]。国内当前采用的电子防摇技术可以实现对吊具摆动的控制,但某些装备了电子防摇系统的集装箱起重机后来又被拆除[4]。原因在于起重机系统的数学模型具有非线性特性和不确定性,常规的控制方法往往难以奏效,因此只有不依赖数学模型且能适应不确定性的智能控制方法才适合应用到这类控制中来。一个好的防摇装置,可以避免碰撞等一系列事故的发生,大大提高起重机的操作效率和起重机操作过程的安全性。所以起重机防摇问题的解决意义极大[5]。
1 二维机械结构设计
二维结构设计如图1所示,采用X、Y轴两个维度的线性滑杆龙门设计,滑杆上的滑块可随着滑台皮带的传动在两个轴上任意切换坐标位置,滑块下方带有一个万向摆,摆下面的吸盘可吸重物,支架的底部与四周用铝型材以及木棒固定来稳定整体装置,两个步进电机以及驱动器安装在步进电机固定架上,滑块安装在X轴滑杆上,连接杆连接Y轴方向的滑杆带动滑块在Y轴方向上的移动。在滑块上方安装控制电路板和气泵,结构如图2所示。电路板采用双层结构,上层是主控芯片以及显示屏,下层是继电器模块、电源模块以及蓝牙模块,姿态传感器安装在万向节杆上检测各个方向的姿态角,并带有独立电池以随时进行电脑上位机加计校准与Z轴归零。气泵与电磁阀各安装在3D打印机内一同固定在滑块上的防摇台上,防摇台设计如图3所示。
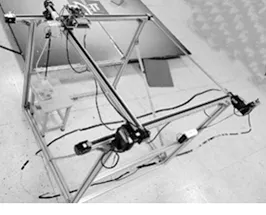
图1 二维结构设计
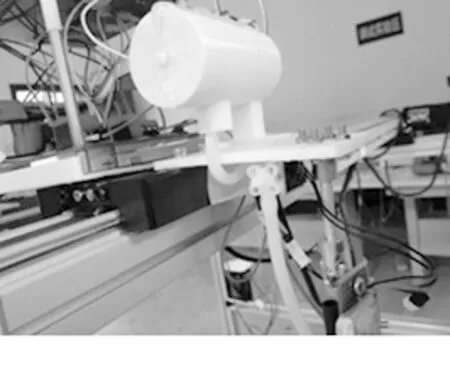
图2 气泵与电路板结构侧视图
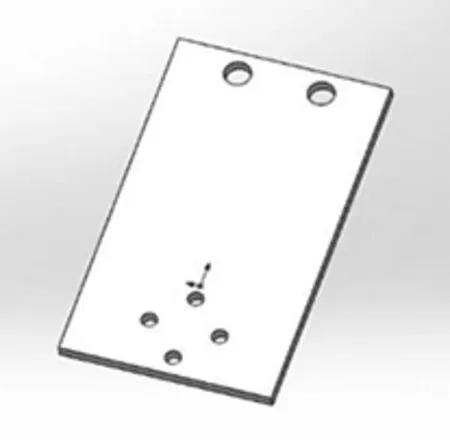
图3 防摇台设计图
二维结构的设计作为本论文的最终设计,该机械结构的设计具备起重机平面移动、载重以及卸货模拟的基本条件。本系统虽然是模拟起重机,但是搭建的起重机结构与真正的起重机没有太大的差别,以便增强数据算法的可靠性。
2 硬件总体设计
本设计数据采集端选用MPU6050加速度传感器,计算出货箱摆角,再由HC-06模块发送数据。步进电机控制端包含STM32主控芯片、OLED显示屏、无线蓝牙通信模块、步进电机驱动器等。HC-05模块同USB-TTL模块连接,给电脑提供数据接口。总体硬件框图如图4所示。
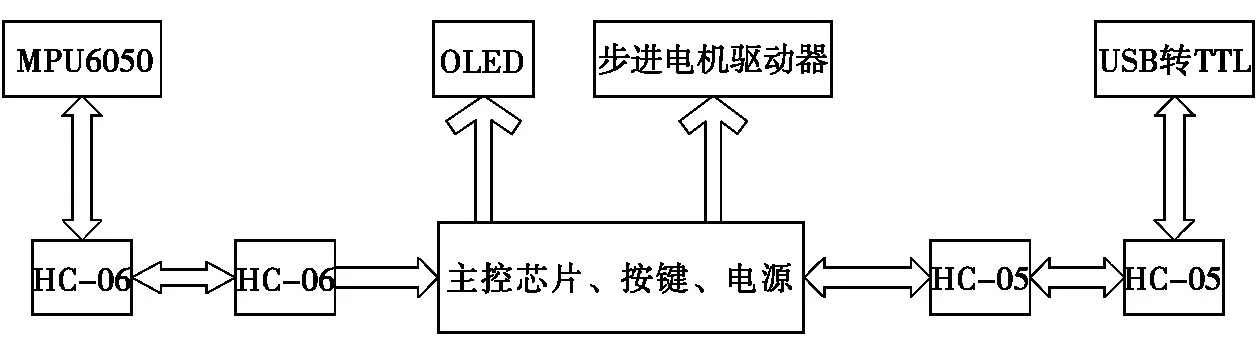
图4 总体硬件框图
2.1 主控模块
本系统主控芯片采用意法半导体公司的STM32F429IGT6,相较于STM32F407降低了停止模式的电流消耗,可延长便携应用的电池寿命。此外,还增加了TFT-LCD控制器,加快图形处理性能的ST Chrom-ART Accelerator 和SDRAM存储器接口。
2.2 电源模块
电源模块为系统其他各个模块供电。设计中用7.4 V 2 000 mA锂离子电池,3.3 V锂离子充电电池,以及22.8 VBT48电池。由于电路中各模块所需工作电压不同,电源模块中还包含3.3 V 稳压电路,因此本设计电路中共两种电压,如图5所示。
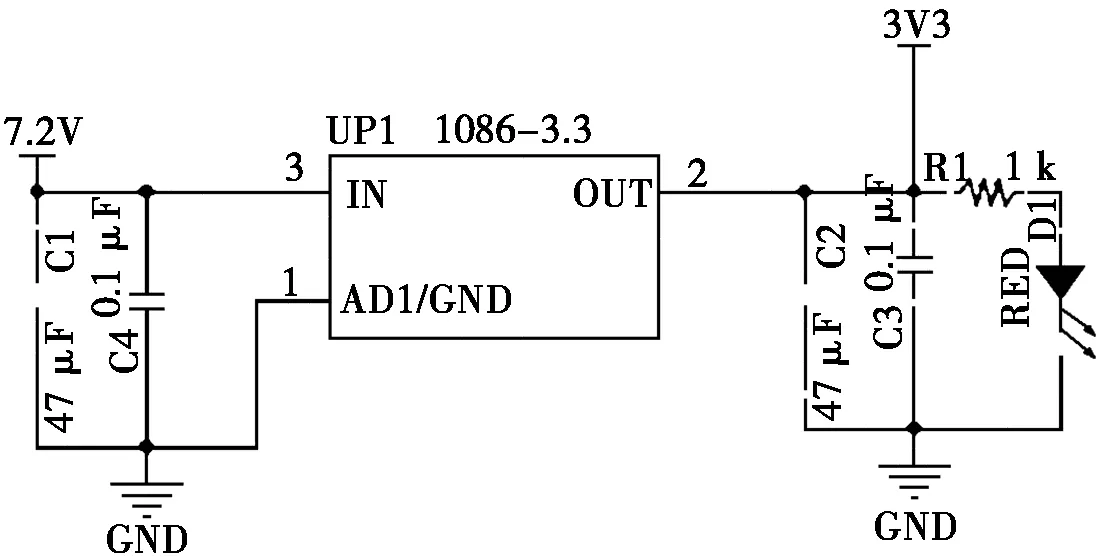
图5 电源模块
2.3 蓝牙姿态传感器
姿态传感器采用维特智能的蓝牙姿态传感器BWT61P,支持三维加速度,三维陀螺仪,三维欧拉角,具有高精度,高性能,低成本等优点。
2.4 步进电机及驱动模块
需用电机驱动滑台在X,Y方向上移动。对于电机的选择,有如下几种方案:
1) 伺服电机:伺服电机具有精度高,适应性强,稳定性好的特点。但伺服电机完全不防水防油,不能用于油水侵袭的场所,成本价高,因此不适合本设计。
2) 直流电机:直流电机具有运转距离大,调速特性优秀,抗干扰能力强等优点,但是其结构复杂,故障高,可靠性低。在此设计中也不适用。
3) 步进电机:步进电机具有最大的转矩,精度在3%~5%,有较好的位置精度和运动的重复性及优秀的启停和反转响应。因此比较适合本设计。
2.5 蓝牙通信模块
本系统需要连接手机APP通过蓝牙快速而准确地发送命令传递给单片机进行处理,并将结果显示在OLED上,因此我们使用增强版蓝牙HC-05模块。
2.6 其它辅助模块
本设计还使用了OLED模块,3.3 V稳压模块,继电器模块。作为辅助模块。
3 软件总体设计
软件部分主要分三部分处理数据,首先数据采集端获取6轴加速度原始数据,经过硬件滤波、卡尔曼滤波,DMP库计算出姿态角,传输到控制端。控制端部分接收数据后,先进行数据校验,再对数据进行解算算出摆角和摇摆速度,利用双闭环PID算法计算出下个周期步进电机该以哪种速度运作,将数据通过串口DMA发送给上位机端。上位机接收到数据,先校验再分类,通过3D图片控件显示到主界面,并在副界面显示货箱姿态数据。三端的程序流程图如图6所示。
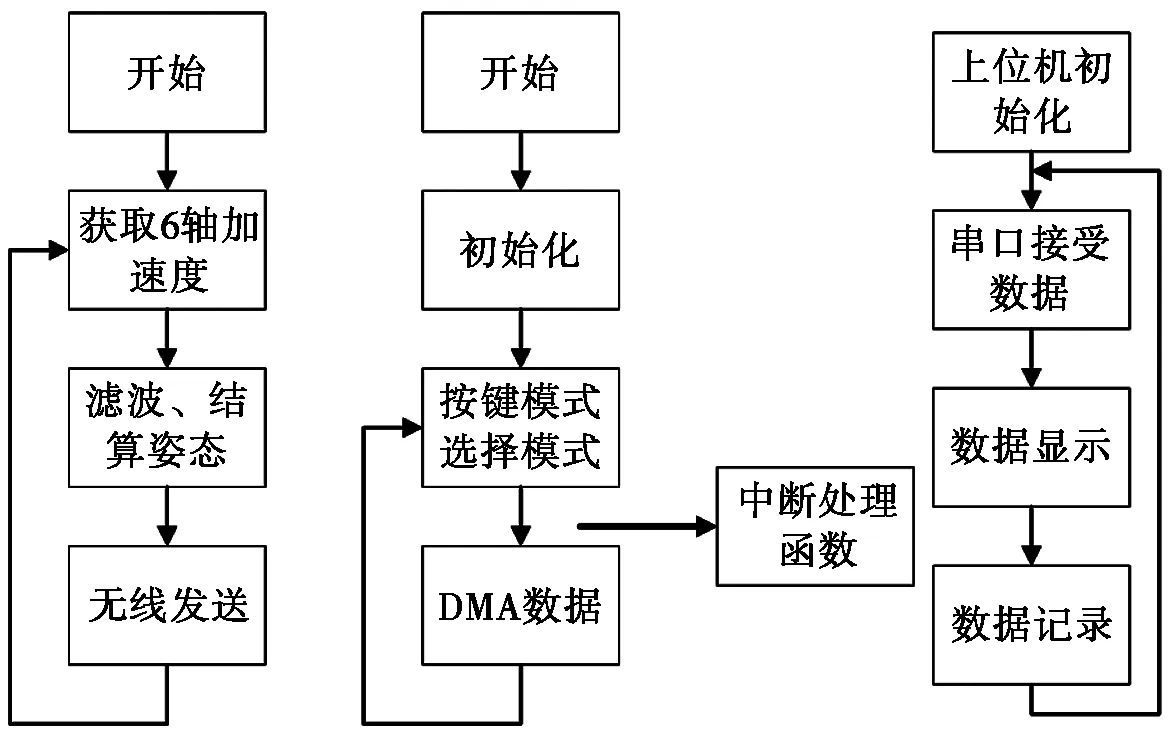
图6 软件设计总体流程
3.1 PID控制器
货箱的摆角调节与小车的速度加速度直接相关。本控制系统以角度偏差为输入,经过PID运算输出值为步进电机的输入脉冲频率,对应着小车的速度。PID控制器在各种工业控制中使用广泛,特点简单实用,主要有三部分组成,P(比例控制)、I(积分控制)和D(微分控制)。比例控制使得系统反应迅速但容易出现超调,微分控制可以一直超调但是响应时间会有所延后,积分环节可以消除误差但容易滞后,三种控制相互配合又可以组成PI控制、PD控制等。
PID控制器最重要的输入参数是偏差,本系统希望货箱始终处在竖直状态记为0度,以采集角度值作为直接偏差输入控制器中,做PD运算。功能是实现只调节竖直状态而不考虑调节后小车所处的位置,选择位置式PD控制。
由于数据采集周期10 ms左右,在每帧数据处理完成之后进行PID运算,输出值直接作为步进电机的输入频率,更改步进电机的速度及转向。
考虑到起重机在货物运送过程中小车是一直运动的,而且在对位吊货过程中要求小车调节幅度不能过大,所以单闭环并不能保证起重机在工作过程中的要求。基于这一原因,本系统采用双闭环串级PID控制,加入速度环来控制小车调整过程中的移动范围。
3.2 串口DMA数据传输
上述程序设计主要是针对步进电机的运动控制,控制端还包括与上位机的通讯问题。在数据采集时用到了USART2,波特率为115200,对于主控芯片来说是一个很大的负担,如果遇上位机通讯选用的USART1发送数据过于频繁,会对通讯质量产生影响,这种情况下采用DMA数据传输。
4 结束语
本文设计了一个起重机防摇系统,其中机械结构能够模拟起重机平面移动,载重及卸货模式,增强了数据算法的可靠性。硬件设计方面,选用MPU6050加速度传感器,STM32主控芯片,OLED显示屏,蓝牙通信模块以及步进电机驱动器等实现系统的防摇功能。软件方面,数据采集端获取原始数据经过滤波再用DMP库计算出姿态角,传输到控制端,利用双闭环串级PID算法计算起重机合适的运作速度,数据通过串口DMA发送给上位机端显示在主界面,并在副界面显示出货箱姿态,调整参数以实现装置的精确控制。调试结果表明,该起重机防摇系统能够实现桥臂的智能控制,有效地提高了起重机的操作效率和起重机操作过程的安全性。
