基于CMOS芯片的协同肢体康复器控制器硬件设计与开发
2021-12-23郭杰
郭杰
(西安航空学院 计算机学院,陕西 西安 710078)
0 引言
虽然国内在多功能康复设备机械结构的研究方面取得了丰硕的成果,但在运动控制器及其相关控制算法研究方面仍与国外存在较大的差距[1-3]。运动控制器过高的研发成本以及控制技术研究的不足,导致国内主流的康复训练系统依旧从国外引进,成本较高且技术保密,这限制国内施力器控制系统成本的降低和核心技术的掌握。针对这一现状,需要对控制器的软硬件架构进行深入研究,在实现施力器多训练模式控制的同时降低控制器的研发、使用和升级成本,以便在未来实现控制器通用化和产品化[4-6]。
人体下肢的肌肉骨骼生物系统是一个复杂的结构,人体的下肢骨骼结构由盆骨、大腿骨骼(股骨)、小腿骨骼(胫骨和腓骨)等组成,盆骨与股骨构成骸关节,股骨与胚骨、腓骨构成膝关节,小腿骨豁和足部骨豁构成躁关节[7-9],双腿关节的闭口肌和张口肌等力量存在明显差异,单出轴设计无法根据左右腿部实际的差异进行科学化训练处方配置,故若能将双腿分开控制,将会取得更好的训练效果,即对二代设备协同控制方法的研究具有很高的价值[10-12]。
目前,康复设备功能朝向多样化发展,要求设备实现的训练功能更多且集成度要求更高,则需要更加巧妙的机械结构设计以及多轴协调运动控制。针对设备功能多样化的发展需求,以便于将来功能拓展,本文设计了多轴控制器,并完成了硬件电路的开发。
1 结构设计
康复设备的种类和功能多样化成为了将来的发展趋势,对腿部多种模式康复训练的控制策略进行了深入的研究,如图1为开发的第一代设备,针对该设备开发多模式控制算法。考虑到双腿的肌力水平不同,本次控制器的设计需要满足两路交流伺服电机和两路直流电机的控制,以便在将来二代康复设备上实现双腿独立控制。通过双施力器进行协同控制将会取得更加科学、高效的训练效果。
施力器结构设计如图1所示。主要由“伺服电机+传动机构+施力臂”组成,该结构采用集约化的设计思想,集成度高、功能完善,且座椅、施力臂电控可调化的设计,满足不同使用者的实际需求。整套设备采用的基本方案如下。

1-支撑底板;2-支撑框架;3-伺服电机;4-行星减速器;5-静扭传感器;6-换向器;7-输出轴连接杆;8-施力臂调节部件;9-推杆电机;10-座椅坐垫;11-座椅前后调节部件;12-推杆电机2;13-座椅上下调节支撑杆;14-施力臂
交流伺服电机+行星减速器+静扭传感器+施力臂输出轴。本结构具有传动效率高、刚性强度大、体积紧凑、运行平稳等优点;力臂调节部件主要由连杆、推杆电机、施力臂3部分组成,通过调节推杆长度实现力臂角度旋转变换;座椅调节机构中,水平、竖直方向通过推杆电机实现座椅在滑槽中前后、上下移动调节。
2 控制器硬件系统结构
为了满足施力器将来的功能拓展需求,本论文设计了性能良好、通用性强、开发性好的控制器,其硬件共由8个电路单元模块组成,各个模块的相关芯片和元器件选型如表1所示。

表1 系统各模块硬件设计
3 控制器硬件电路设计
3.1 CMOS芯片选型
考虑到训练时需要保证操作者的安全性,即运动控制过程必须快速响应和有良好的实时性,故对芯片的选型尤为重要。CMOS系列芯片由于其集成度高、可靠性好被广泛认可,本文选用芯片为ARM公司下CMOSLDO50,具体参数如下。
内 核:Cortex-M4
存储资源:192KBRAM 1024KBFLASH
工作频率:168MHZ
接口类型:1×SDIO接口;1×FSMC接口;1×ETH接口;140×IO口定时器;2×基本定时器;10×通用定时器;2×高级定时器调试下载:支持JTAG/SWD接口的调试下载,支持IAP
CMOS处理器及其外围电路设计框如图2所示。
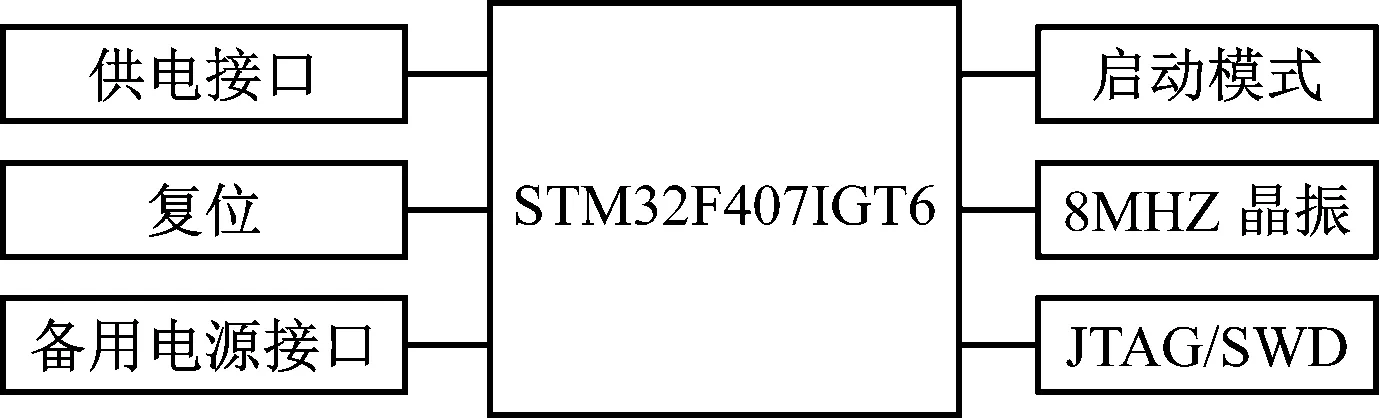
图2 CMOS处理器及外围接口设计
3.2 电源接口模块
在设计控制器电源模块硬件电路时,需要考虑到实际应用,针对课题中实际控制中需要接入24 V的接近开关及若干12 V、5 V工作电压的传感器等设备,故需要在控制器设计时预留相应的供电接口,使其可以满足多功能开发要求。
如图3所示,ARM系列芯片外围电路常用供电电压为5 V和3.3 V,本文采用DC-DC芯片LM2596S-5.0和LD117-3.3 V分别实现24 V-5 V和5 V-3.3 V电压转换工作。其最大输出电流分别可达2A和1A,具有限流保护和过热保护功能,通过其输出作为CMOS芯片主供电源。D6是SMAJ5.0A的瞬态电压抑制二极管,可避免由于外部供电电压不稳定,导致开发板无法正常工作,亦可防止由于外部电源接反导致开发板被烧毁。在外部电源输入前端加入一个EMI滤波器,很大程度上减小了电源的共模噪声,以此可降低电源杂波对控制器的干扰,如图3所示。

图3 5 V和3.3 V电压转换电路
3.3 多轴输出控制接口模块
本文所设计的控制器须具备多电机接口设计,且在电机硬件接口电路设计时要考虑到其可靠性和稳定性。CMOSF407的I/O口输出脉冲不可以直接用来控制电机,须对其信号进行隔离与整形处理。本设计预留4路电机接口,其中方向与使能输出通过普通光耦PC817进行隔离,脉冲通过高速光耦HCPL-2630/2631隔离输出,该芯片的传输速度高达10 MB/s,可以输出高速脉冲来满足控制电机的要求。在使用时,这里将其配置为推挽输出模式,将电机接口设计为共阳极模式,即PUL+、DIR+和EN+直接短接到+5 V,对应负极与光耦输出相接,多电机控制接口设计电路如图4所示。

图4 电机输出接口电路设计
本控制器需要采集两路交流伺服电机的位置信息反馈,CMOSF407芯片的高级定时器具有可编程死区互补的输出功能,因而非常适用于伺服电机的控制应用。本控制器预留了2个编码器接口,在设计中选用增强型的高速CMOS接收器DS26LV32对编码器信号进行处理。虽然只是预留了2个专用接口,但编码器接口实际上只用到了定时器功能,所设计的控制器可支持多路编码器接口扩展。接口电路设计如图5所示。

图5 编码器接口电路设计
3.4 模拟量接口模块
考虑到实际使用以及将来功能拓展需求,设计了6路模拟量输入接口,用于接收外部传感器(扭矩传感器等)的模拟信号,用于扭矩采集、保护等。本设计模拟量接口均通过芯片自带的ADC/DAC资源来实现。模拟量模块需要单独供电,考虑到所接扭矩传感器模拟量输出为0-5 V,而CMOSF407的模拟量模块最大输入电压为3.3 V,故本文设计了分压电路对其处理,通过电阻R54、R52双电阻进行降压处理。对于模拟量输出模块,通过引入3.3 V的参考电压Vref,进而实现3.3 V内电压值输出。而在实际常要用到的电压值为0-10 V,为了保证模拟量输出具有一定的驱动能力,引入了LM358构成的运放电路,通过改变R59和R61便可实现电压放大,接口电路如图6所示。
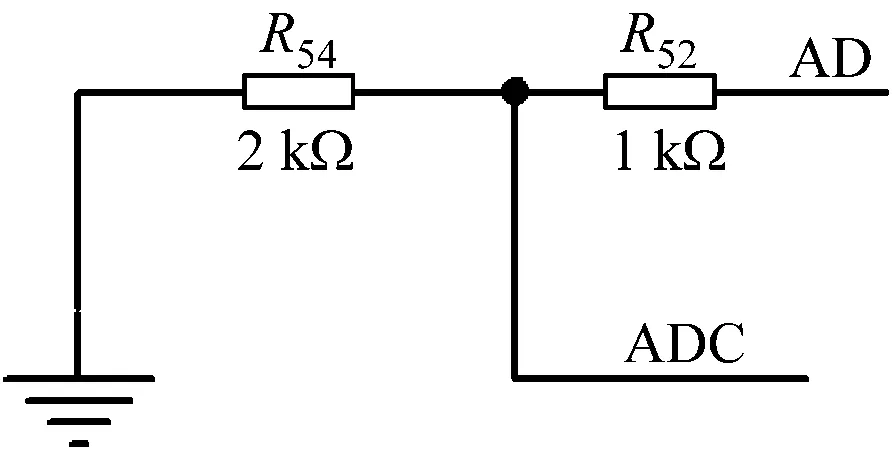
(a)分压采集电路
3.5 数字量接口模块
多轴控制器设计了16路输入和10路输出接口,用于接收外部传感器(限位开关、接近开关等)的数字信号。在输入输出接口均使用光耦IS2801-4进行隔离。CMOSF407芯片的GPIO口可以配置为多种工作模式,输入接口可以配置为输入浮空,输入上拉,输入下拉和模拟输入,数字量输出可配置为开漏复用功能、开漏输出、推挽输出和推挽式复用4种。本文将输入接口配置为上拉模式,输出接口配置为推挽输出模式,接口电路如图7所示。在数字量输入接口,可兼容24 V和12 V电压输入,在数字量输出端通过EXVCC上拉电压,可以提供高低电平输出。

(a)数字量输入接口电路设计
3.6 控制器电磁兼容设计
实践证明,原理图设计即使正确,但若PCB板设计不规范,也会无法正常使用,例如电源线与信号线过近、数字地与模拟地混合使用,元器件位置排放不当均会造成干扰,引起多轴电机控制不精确,因此硬件电路板布线是一个非常重要的步骤。为了保障控制器使用时的安全性问题,结合康复医疗设备使用的场合,必须要提高控制器的抗干扰能力,电磁兼容性是指设备或者系统在电磁环境中符合要求运行且可以不受外界干扰的能力。因此需要满足该控制器抗干扰高且不对其他电子设备产生干扰。在本文硬件电路板设计过程采用了以下可靠性措施。
(1)接地技术。将数字地与模拟地分开,布线应遵循相应的规则,对部分重要的电源线、信号线加以处理,如加粗接地线,可提高抗噪能力。
(2)屏蔽技术。在PCB电路设计时对多轴接口模块进行屏蔽处理,提高抗干扰能力。
(3)隔离技术。通过使用光耦和运放元件对模拟输入、输出信号进行了隔离。
(4)滤波技术。滤波是为了有效地去除噪声干扰,在电路设计中对所有芯片的电源均连接小容量无极性电容器,起到去耦的作用。
合适的布局以及合理的走线,并设计出可靠性的控制板,在实际使用中才是可靠的。
4 总结
本文首先对研究对象施力器结构进行了介绍,完成了硬件控制系统结构设计。对硬件控制结构模块化处理,详细地介绍了所设计电路各个模块的功能和芯片选型,然后以ARM处理器CMOSLDO50为核心,对每个模块进行了电路设计,根据硬件电路布线的相关规则,完成了稳定可靠的控制器硬件设计。
