基于虚拟弹簧阻尼的智能车辆路径预瞄跟踪控制*
2021-12-22唐雨冀杰任玥赵颖黄城
唐雨 冀杰 任玥 赵颖 黄城
(西南大学,重庆 400715)
主题词:自动驾驶 路径跟踪 质量弹簧阻尼 固有频率 阻尼比
1 前言
路径跟踪控制是实现汽车智能化的关键技术之一,它主要通过车载传感器检测自身位置与期望轨迹的相对偏差,根据路径跟踪控制策略计算出转向角大小和方向,控制车辆沿期望路径自主行驶[1-3],在保证车辆主动安全性与稳定性方面具有重要意义。
国内外诸多学者对车辆路径跟踪控制的关键技术进行了相关研究。由于车辆参数具有不确定性,文献[4]提出了一种对车辆不确定性和外部干扰具有较强鲁棒性的自抗扰控制(Active Disturbance Rejection Control,ADRC)算法,文献[5]研究了一种基于状态估计的自适应滑模控制策略,将估计结果作为跟踪控制系统的输入量,提高了路径跟踪过程中车辆的横向稳定性。另外,由于车辆动力学行为相对于控制输入存在时间滞后:文献[6]、文献[7]结合单点预瞄方法,分别提出一种非奇异终端滑模控制和自适应滑模控制策略,但所设计的控制器只考虑了横向位置误差,未充分考虑车辆横摆误差的影响;文献[8]、文献[9]提出一种预瞄式模型预测控制(Model Predictive Control,MPC)算法,对车辆相对于车道中心线的横向运动状态(车辆横向位移及横摆角)偏差进行预瞄,但其优化求解过程计算量较大,导致实时性较差。
通过文献分析可知,路径跟踪控制器主要根据车辆与道路之间的横向偏差、横摆角偏差来确定车辆的前轮转向角,若控制器结构过于复杂,则求解时间较长,将难以在实车上进行实时控制。在工程应用中,质量弹簧阻尼(Mass-Spring-Damper,MSD)模型具有结构简单、响应速度快、易于控制等优点,当质量、弹簧刚度和阻尼系数确定之后,可根据2个物体之间的相对距离和相对速度求解其运动响应,这与驾驶员在路径跟踪过程中的操作行为较为契合。受此启发,本文在车辆与道路间构建虚拟MSD系统,用于解决车辆的道路跟踪问题。目前,MSD控制主要应用于车辆队列及飞行器编队中[10-13],利用虚拟MSD 理论已开发出很多具体功能,为本文研究奠定了重要的理论基础。
由此,本文提出了一种基于虚拟MSD 模型与驾驶员预瞄理论相结合的路径跟踪控制系统:根据车辆在预瞄点处的横向位置偏差和横摆角偏差建立状态方程,运用MSD 模型,将智能车辆的路径跟踪问题转化为道路曲率变化激励下的车辆横向位置偏差及横摆角偏差振动响应问题。基于此过程设计虚拟弹簧阻尼控制律,以稳定性和快速性为控制目标对控制器参数固有频率和阻尼比进行约束,并提出系统误差性能函数,优化求解得到控制参数的最优值,最终通过仿真分析及实车试验对控制器的有效性进行验证。
2 曲率激励下的虚拟MSD模型
2.1 预瞄式MSD运动模型
基于驾驶员预瞄与虚拟弹簧阻尼理论,建立如图1所示的车辆路径跟踪运动模型。
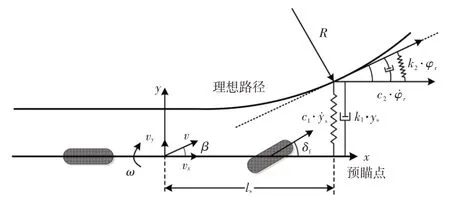
图1 预瞄式MSD运动模型
图1 所示的车辆运动模型模拟了驾驶员的预瞄行为,以受控车辆为虚拟MSD模型的质量元件,在预瞄点处构建2组虚拟的弹簧和阻尼器。其中:虚拟弹簧S1和虚拟阻尼器D1用于描述预瞄点处横向偏差的响应特性,S1的振幅与横向距离偏差ys成正比,而D1的振幅与横向偏差变化率y˙s成正比;虚拟弹簧S2和虚拟阻尼器D2用于描述横摆角偏差的响应特性,S2的振幅与横摆角偏差φr成正比,而D2的振幅与横摆角偏差变化率φ˙r成正比。因此,2组弹簧和阻尼器共同构成了二自由度弹簧阻尼系统,同时对横向偏差及车辆横摆角偏差进行控制,从而实现智能车辆的路径跟踪。
由振动力学原理可知,虚拟MSD 系统提供的虚拟侧向力Fc和横摆力矩Tc可分别表示为:

式中,k1、k2分别为虚拟弹簧S1和S2的刚度系数;c1、c2分别为虚拟阻尼器D1和D2的阻尼系数。
由图1可得车辆的预瞄运动模型为:
式中,v为车辆质心速度;β为车辆质心侧偏角;ls为预瞄距离;r为横摆角速度;vx为车辆纵向速度;φd为预瞄点处的期望横摆角;κ为道路曲率;yc为车辆质心处的横向距离偏差。
当车辆质心侧偏角较小时,可近似得到:
式中,vy为车辆横向速度。
2.2 车辆动力学模型
为了兼顾控制模型的实时性和有效性,本文选用二自由度车辆模型作为研究对象,如图2所示,并假设:车辆纵向速度保持不变,只需要考虑车辆的横摆运动和横向运动;忽略空气动力学及道路坡度影响;车辆以前轮转向,后轮保持转向角度为0°。图2 中,XOY为绝对坐标系,xocy为车辆坐标系,oc为车辆质心。
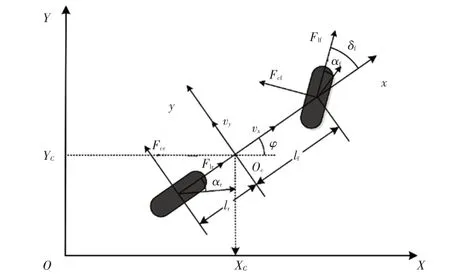
图2 车辆二自由度模型
根据车辆动力学原理及牛顿运动定律,车辆的横向动力学模型可表示为:

式中,m为整车质量;Fli(i=f,r)分别为车辆前、后轮纵向力;δf为前轮转角;Fci(i=f,r)分别为根据Pacejka轮胎模型得到的车辆前、后轮侧向力;Iz为车辆绕垂直轴的转动惯量;lf、lr分别为质心到前轴和后轴的水平距离;αi(i=f,r)分别为前、后轮滑移角;B、C、D和E为Pacejka 模型参数。
由图2可知,分析轮胎受力时若仅考虑轮胎的侧偏特性,当滑移角α和前轮转角δf较小时,可将侧偏力线性近似为:

式中,ci(i=f,r)分别为前、后轮侧偏刚度。
对建立的车辆MSD运动模型及车辆动力学模型进行综合分析,对式(3)和式(4)求导,并结合式(7)~式(11)可得:

将式(1)和式(2)代入式(12)和式(13)中,可得在道路曲率变化的激励下,基于虚拟MSD 模型的车辆路径跟踪响应方程:
3 虚拟MSD控制策略设计
智能车辆的路径跟踪需要实现横向和横摆运动的协同控制,是具有多状态变量的问题。基于虚拟MSD的控制方法将运动主体通过虚拟弹簧和阻尼器互相连接,因此运动主体之间存在弹簧力和阻尼力,从而使系统趋于相对运动的平衡位置,保持系统稳定,实现控制目标。因此,本文将车辆的运动状态(车辆横向距离及横摆角)作为控制器的参考输入,根据车辆动力学特性设计虚拟MSD 路径跟踪控制器,通过控制前轮转角实现车辆的路径跟踪。
智能车辆轨迹跟踪控制系统的实质是以前轮转角为输入的单输入多输出系统,而式(14)仅为MSD 系统的状态响应,无法直接作为智能车辆的控制输入,需进一步转化为车辆的前轮转角控制量δf后对车辆进行控制。
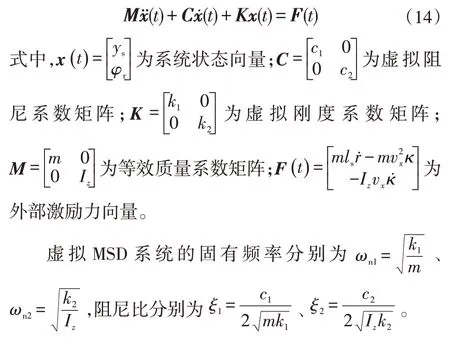
综合考虑车辆质量、虚拟弹簧刚度及阻尼系数的影响,将式(14)进一步转化为:
对式(15)进行求解,得到在不同控制器参数下的系统状态x(t)的响应。根据图2构建的二自由度车辆动力学模型,整合式(7)~式(13),得到考虑横向距离偏差和横摆角偏差的MSD控制器的前轮转向角分别为:
综合考虑路径跟踪过程中横向距离偏差和横摆角偏差,本文取总的控制律为:

式中,λ1>0和λ2>0为控制加权参数。
横向距离偏差反映了路径跟踪控制的精度,横摆角偏差则反映了路径跟踪控制的稳定性,因此,本文以横向偏差为主要性能指标,横摆角偏差为次要性能指标,并经过多次仿真采样测试,选取性能较优的加权参数为:λ1=0.7,λ2=0.3。
4 任意道路曲率激励下的MSD系统响应
在智能车辆的路径跟踪过程中,外部激励函数会随着道路曲率的不同而变化,为得到任意激励函数下虚拟MSD 系统的控制响应,本文采用脉冲响应法对振动方程式(15)进行求解。
任意激励函数的幅值大小随时间变化,一般作用一段时间后停止作用。对于任意函数f(t),可将其分解为一系列强度为f(t)dτ的脉冲信号,如图3所示。求解时,先求得每一个冲量f(t)dτ引起的系统响应h(t-τ),然后利用叠加原理,对所有脉冲引起的响应进行叠加,利用杜哈梅积分得到系统模型在整个激励函数f(t)作用下的响应。
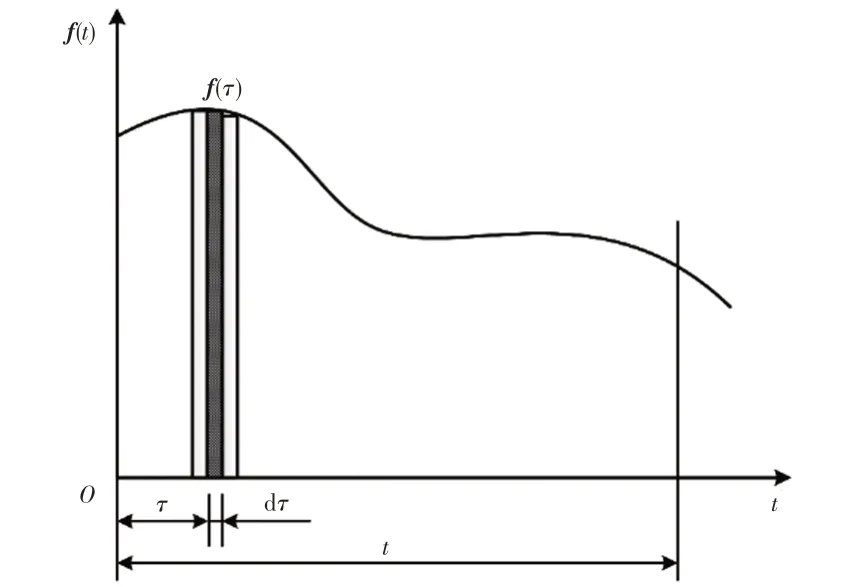
图3 杜哈梅积分
图3中的任意激励函数f(t)可视为一系列微脉冲的组合,利用叠加原理,任意激励函数f(t)引起的响应等于所有时刻脉冲响应的总和。所以,MSD 系统对任意激励的响应为:

式中,h(t-τ)为t=τ时刻的单位脉冲响应函数。
对于单位冲量I=1 N·s,t=0时刻单位脉冲δ(t)激励下的运动响应为:

将式(20)带入式(19)中,得到MSD 系统对任意激励的响应为:
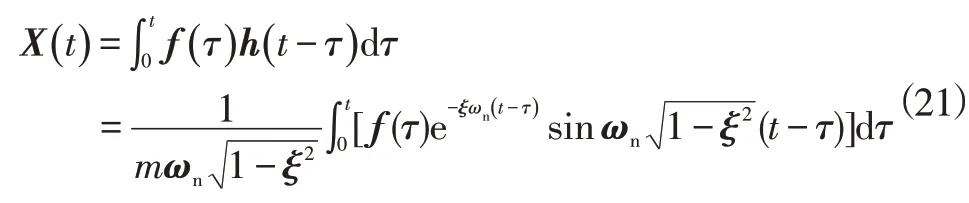
式(21)为杜哈梅积分,利用该公式即可得到式(15)中任意激励下MSD 系统的状态响应,进一步可得到车辆前轮转角δf的控制响应。
5 MSD控制参数优化及确定方法
在智能车辆的自动驾驶过程中,需要兼顾路径跟踪控制器的系统稳定性和响应速度。MSD模型中固有频率ωn和阻尼比ξ是决定上述性能的2 个重要控制参数,不同的取值对系统状态的影响非常大。因此,本文对图1 所示系统中MSD 模型的ωn和ξ分别进行求解和优化,在保证控制器稳定性的同时提高系统的响应速度,以实现更理想的路径跟踪性能。
MSD 系统根据阻尼比的大小可分为过阻尼(阻尼比ξ>1)、临界阻尼(ξ=1)和欠阻尼(ξ<1)系统,不同阻尼比下的MSD系统在零初始状态脉冲激励下状态响应如图4所示。
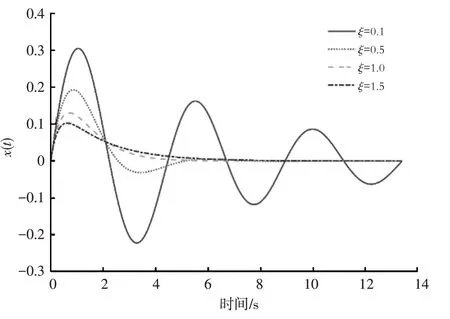
图4 不同阻尼比下的MSD系统脉冲状态响应
其中:过阻尼和临界阻尼系统的响应曲线按指数规律衰减,车辆运动状态不会产生振荡,能够满足系统稳定性要求,是较为理想的控制状态;欠阻尼系统的响应曲线为非周期性运动,车辆运动状态在平衡位置附近往复振动,最终衰减稳定在平衡位置。阻尼比越小,系统达到稳态需要的时间越长,阻尼比过小甚至会导致系统始终无法达到稳定状态。
结合理论分析及图4所示的仿真结果,为满足系统稳定性要求,本文对MSD 控制系统的阻尼比施加初始约束:

在路径跟踪过程中,车辆频繁转向会极大地影响驾驶员的舒适性和车辆的控制稳定性。因此,本文将前轮转向角的角速度及其最大超调量作为衡量系统稳定性的指标。假设系统在设定时间内可达到稳定状态,且整个过程无振荡现象,最大转向角等于转向角稳态值,则理想前轮转角及其角速度应分别满足如下约束:

式中,δss为理想转向角稳态值,t0为系统达到稳态的时间。
为了平滑MSD 系统参数的优化求解过程,在上式约束中加入缓冲区域,将式(23)约束转化为前轮转角及其角速度软约束:
当道路曲率为常数,系统达到稳态时,根据文献[6]中的方法得车辆稳态转向角为:

式中,L=lf+lr为轴距。
以如图5 所示直线-圆弧工况为例,定义车辆纵向速度为72 km/h,分别对2 组MSD 控制器单独控制时的车辆状态进行求解,采用控制变量法,对2 组MSD 模型的系统参数进行优化。
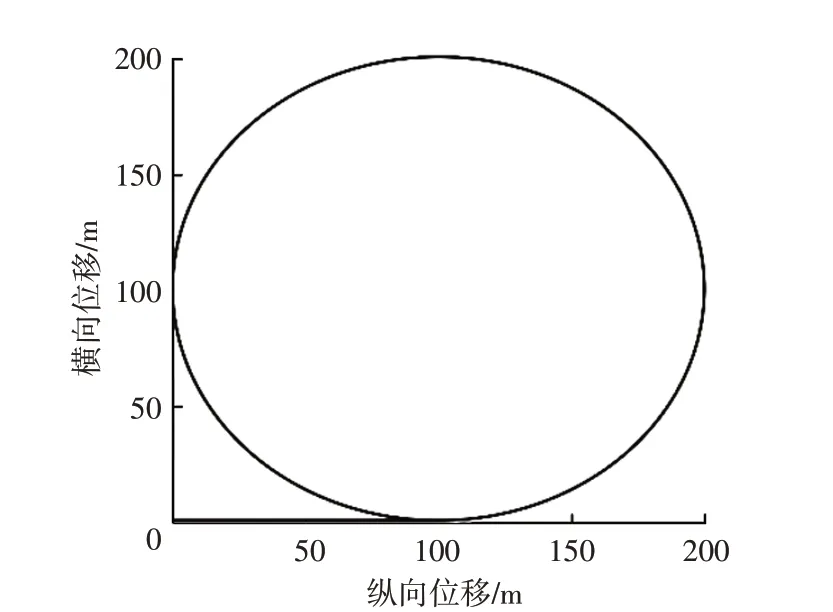
图5 直线-圆弧工况
分别将不同ωn和ξ带入式(15),结合式(16)、式(17)和式(21),得到不同参数组合下路径跟踪控制系统的前轮转角及其角速度响应,如图6和图7所示。
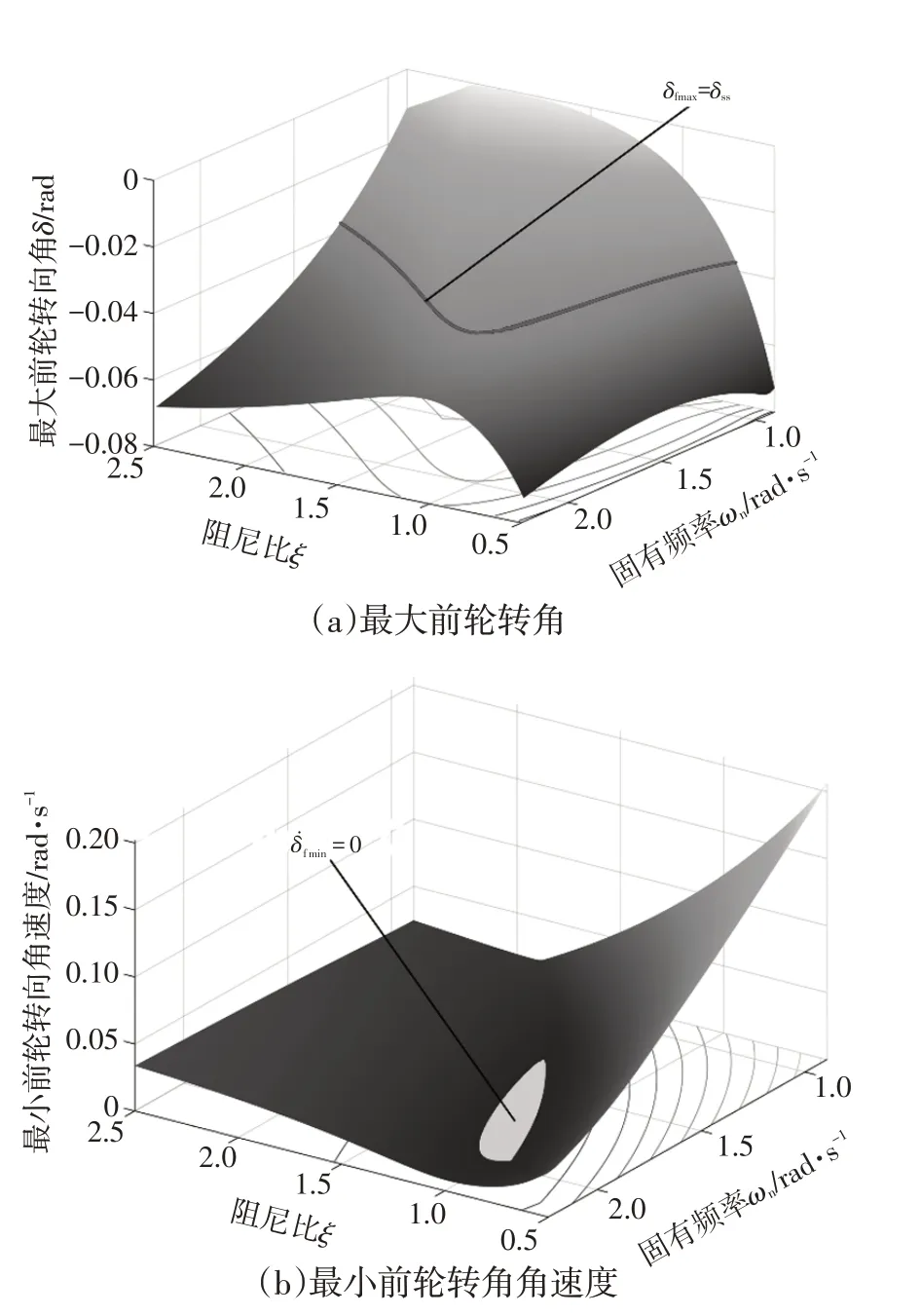
图6 横摆角MSD稳定性约束
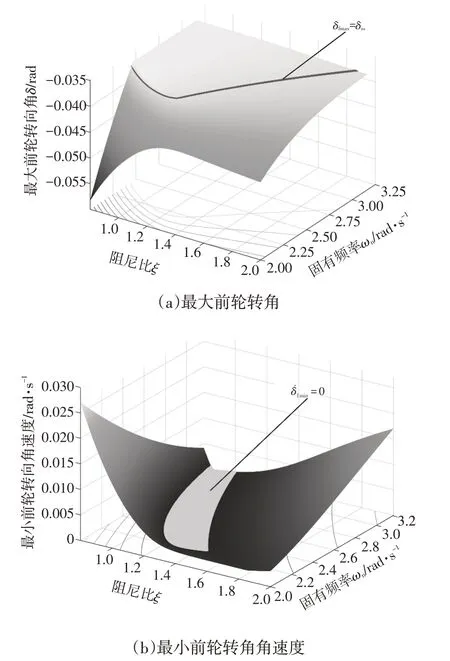
图7 横向间距MSD稳定性约束
当最大前轮转角大于理想稳态值时,MSD 系统的控制量存在超调,当最大前轮转角小于理想稳态值时,MSD系统无法在有限时间内达到稳态,这2种情况均不符合理想控制要求。为满足系统控制稳定性要求,根据约束方程式(24),得到满足最大转角的参数组合,如图6a和图7a中曲线所示。
最小前轮转角角速度大于0时,MSD系统无法在有限时间达到稳态,最小前轮转角角速度小于0 时,MSD系统在控制过程中存在振荡现象,这2种情况均不符合理想控制要求。为满足系统控制稳定性,根据约束方程式(24),得到满足最小前轮转角角速度的参数组合,如图6b和图7b中曲面所示。
结合式(24)中前轮转角约束及前轮转角角速度约束,此时最大前轮转角等于理想稳态前轮转角,最小前轮转角角速度为0,系统最大超调量为0,且无振荡现象,达到了优化效果,此时对应的参数组合即为满足系统稳定性约束的所有参数组合。
为了平滑路径跟踪过程中系统的动态响应,进一步提高控制系统的稳定性及快速性,在对MSD 控制器参数进行优化时,以车辆质心的横向距离偏差、横摆角及转向角响应为指标,构建系统误差性能函数:
式中,δf(t)为t时刻车辆的前轮转角;δss(t)为t时刻理想稳态转向角;yc(t)为t时刻车辆质心处横向距离偏差;φr(t)为t时刻车辆横摆角偏差;P、Q、R为性能函数的权重因子。
将前文得到的满足稳定性约束的参数组合代入系统性能误差函数进行求解,得到满足约束的不同参数组合对应的系统误差,对其进行最小值求解,得到系统误差函数的最优值并定位该点的ωn和ξ参数值,即为该工况下的最优参数组合,如图8a、图9a 所示。2 组MSD 控制器参数最优值分别为:ωn1=1.932 4,ξ1=1.12;ωn2=2.224,ξ2=1.191。

图8 横摆角MSD最优参数

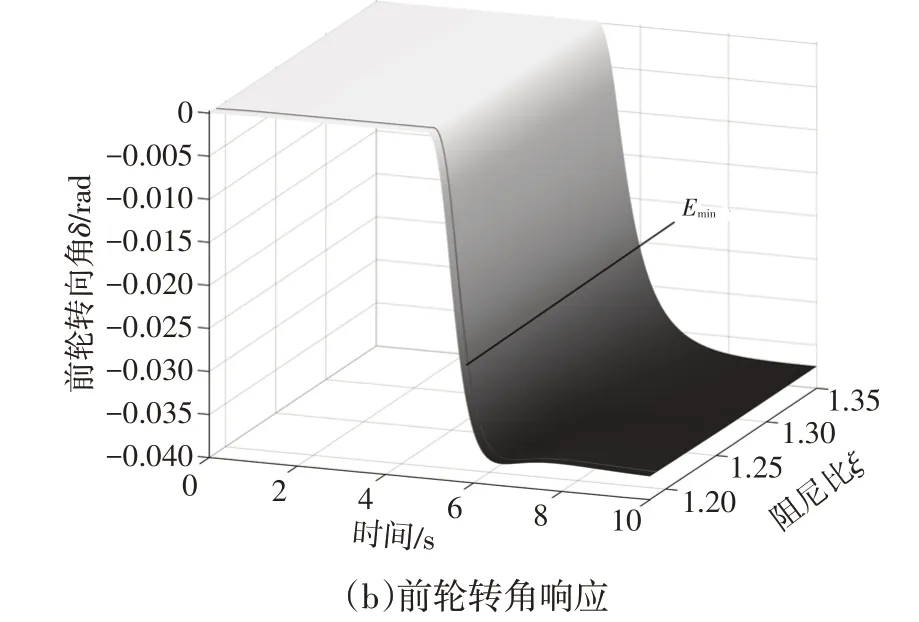
图9 横向间距MSD最优参数
将满足稳定性约束条件的参数组合代入式(16)、式(17)中,并对转向角响应进行求解,得到受控车辆转向角随时间变化的曲线,如图8b和图9b所示,从图中可以看出,选择最优ωn和ξ数值时,控制系统的稳定性和快速性均能得到满足。
6 仿真分析与试验验证
为了验证本文所设计控制器的有效性,在MATLAB/Simulink 中搭建虚拟MSD 模型,并结合CarSim 中车辆模型进行联合仿真分析,仿真参数如表1 所示。

表1 车辆仿真数据
6.1 仿真测试道路模型
道路模型是车辆路径跟踪控制的参考轨迹,在控制过程中,实际轨迹与参考轨迹间的偏差是评价路径跟踪控制器最重要且最直观的指标。为了更加规范地对本文设计的MSD 控制器进行测试,参考CJJ 37—2012《城市道路工程设计规范》及ISO 3888-2《乘用车车道急剧改变操纵用试验车道》,选用双移线轨迹作为本文的参考轨迹,用于分析车辆在标准测试工况下的路径跟踪性能及转向操纵稳定性,如图10所示,路径参数如表2所示。

表2 路径参数 m
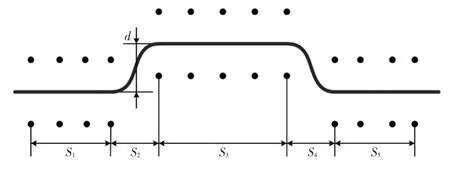
图10 双移线路径
双移线工况的轨迹方程为:
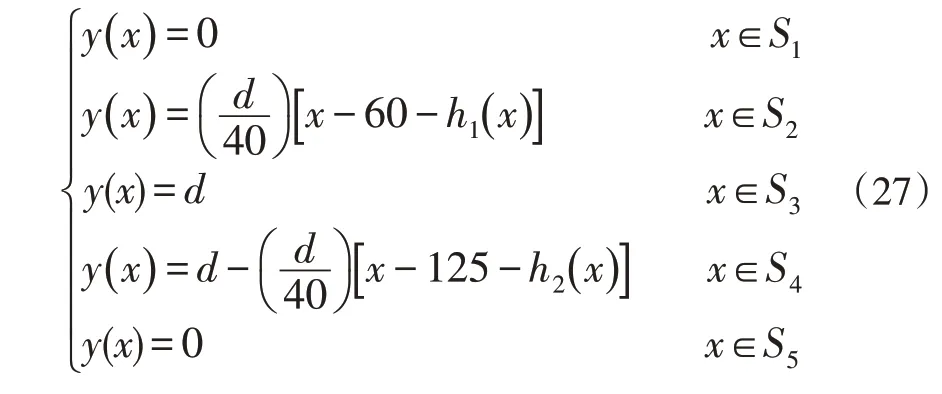
其中:

式中,x、y分别为绝对坐标系下道路中心线横、纵位置坐标;d为道路宽度。
由双移线工况的轨迹方程式(27)及曲率κ计算公式(29)计算得到双移线道路曲率,如图11所示:

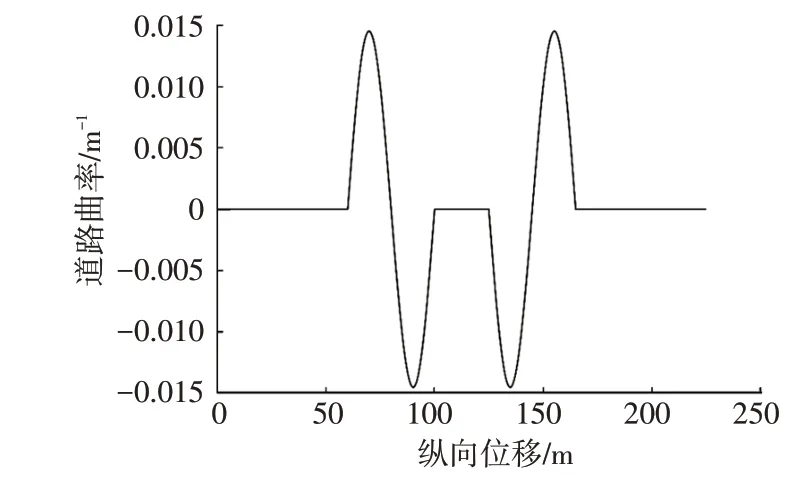
图11 双移线道路曲率示意
6.2 仿真验证分析
为了验证本文提出的控制器的性能,仿真车辆分别采用低速(36 km/h)和高速(72 km/h)2 种纵向车速对双移线工况进行跟踪,并将本文所设计的二自由度综合预瞄式MSD 控制器与结构相似的线型二次型调节器(Linear Quadratic Regulator,LQR)进行比较,对比分析车辆的轨迹跟踪效果、横向间距偏差及横摆角偏差,仿真结果如图12、图13所示,轨迹跟踪的状态偏差峰值及平均仿真时间如表3所示。
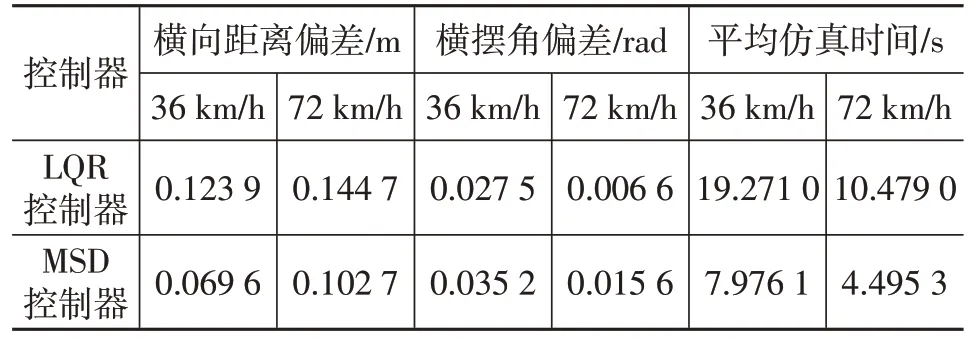
表3 仿真结果
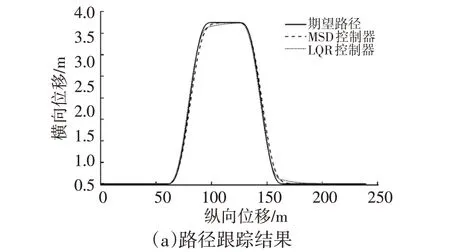
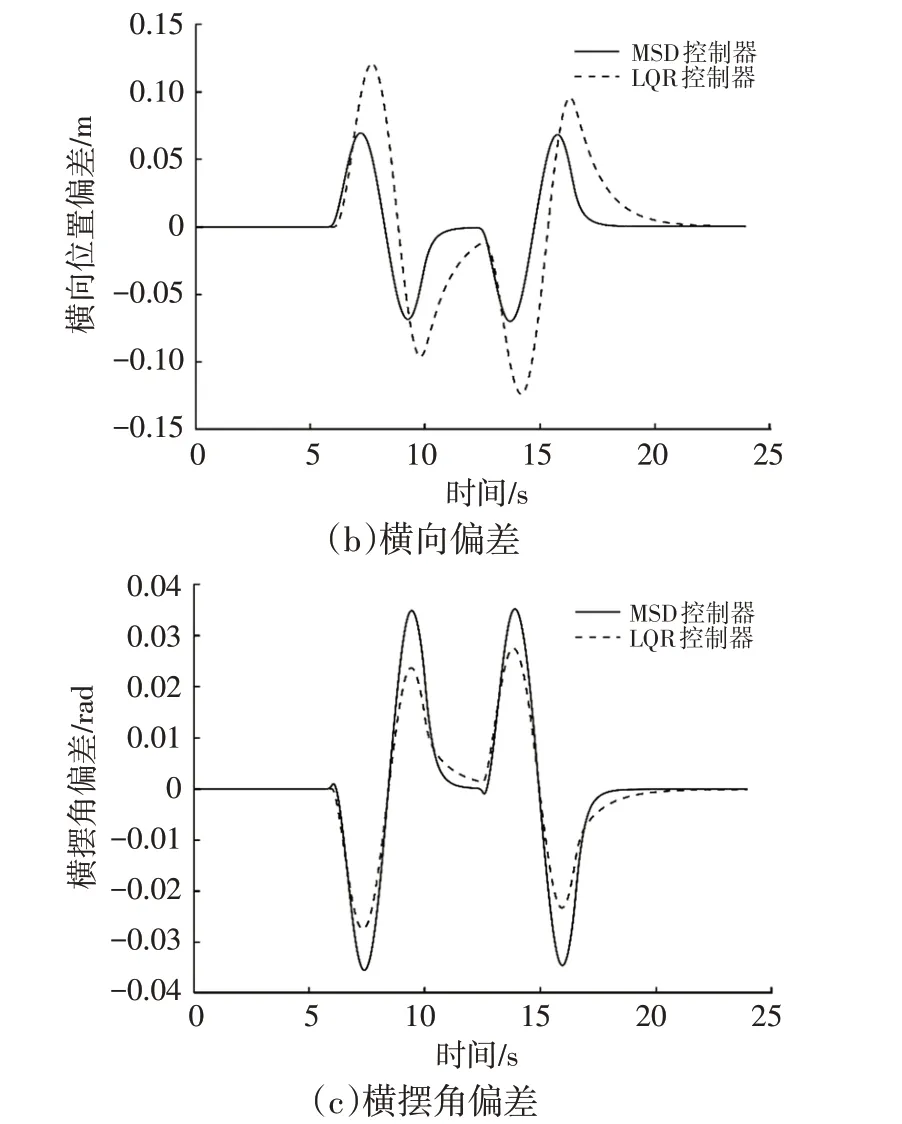
图12 36 km/h仿真结果对比

图13 72 km/h仿真结果对比
由图12、图13 及表3 可知,在车速为36 km/h 和72 km/h 的仿真工况下,2 种控制算法均能较好地完成路径跟踪目标。由图12b 和图13b 可以看出,MSD 控制算法在2 种速度工况下均有更高的跟踪精度。由图12c 和图13c 中可以看出,车速较低时,2 种算法下车辆横摆角偏差变化情况基本相同,保持在相对较小的范围内,随着车速提高到72 km/h,2 种控制算法均能保持车辆稳定性,但LQR 控制器具有更高的稳定性。另一方面,在同一仿真步长下,MSD 控制方法具有明显的实时性优势。
从上述仿真结果可以看出,本文提出的综合预瞄式MSD控制器在不同速度工况下均能保证控制系统的稳定性和实时性,有效提升车辆路径跟踪精度。
6.3 试验验证
为验证本文设计控制系统的可行性,以图14 所示的无人驾驶电动转运车为试验样车进行了试验验证。

图14 试验车辆
选取的试验场地如图15 所示,试验采用司南导航系统标定目标路径作为控制器参考路径,图16 所示为转换后的离线坐标数据,结合前文设计路径跟踪算法对该路径进行跟踪试验。考虑到实车试验的安全性及电动转运车的局限性,试验选取低速环境,试验结果如图17所示。
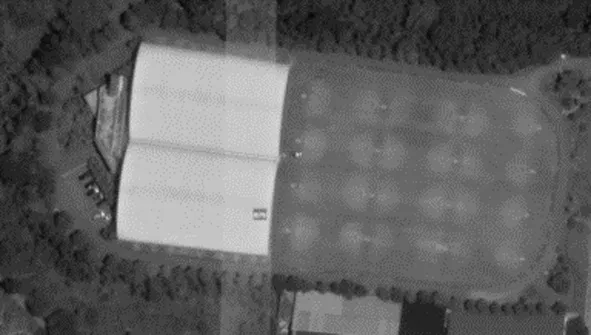
图15 试验道路真实场景

图17 试验结果
由图17可知,在整个路径跟踪过程中,车辆前轮转向角相对平稳,无明显振荡,且车辆横向偏差始终控制在±0.3 m以内,航向角偏差控制在±0.12 rad以内。造成试验误差略大于仿真误差的原因主要有:司南系统离线标定的道路信息存在一定误差;试验车辆部分动力学参数存在不确定性,只能通过试验得到近似值;试验过程中车辆速度存在波动。
基于以上无法避免的影响因素,其在路径跟踪过程中车轮转向角无明显抖动,跟踪误差在合理范围内,这表明控制器控制车辆实现了对真实道路的良好跟踪,进而证明了本文设计的综合预瞄式MSD控制器在真实环境下的有效性。
7 结论
a.基于虚拟质量弹簧阻尼与驾驶员预瞄理论建立的路径跟踪数学模型能够较为准确地模拟驾驶员路径跟踪特性并定量反映横向距离偏差及横摆角偏差等关键路径跟踪性能指标。
b.利用虚拟MSD控制器的参数优化方法,能够确定2组固有频率及阻尼比的最优值。仿真结果表明,在最优参数工况下,可以满足虚拟MSD 控制器的约束条件,并使系统稳定性和快速性的综合性能达到最优。
c.与LQR最优预瞄控制算法相比,提出的二自由度预瞄式MSD控制算法可以在保证车辆稳定性的基础上,有效地提高路径跟踪精度,且具有明显的实时性优势,能够适应实车实时路径跟踪控制。