速度反馈分数阶PID控制对齿轮系统振动特性的影响
2021-12-20侯静玉杨绍普刘永强
侯静玉,杨绍普,李 强,刘永强,3
(1.北京交通大学 机械与电子控制工程学院,北京 100044;2.石家庄铁道大学 省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄 050043;3.石家庄铁道大学 机械工程学院,石家庄 050043)
随着机械系统不断向着高速度、高精度、高效率等多个方向发展,对传动系统的性能也提出了更高的要求。齿轮系统作为机械传动中应用最广泛的传动形式,其具有很多优点,比如传动比较准确、效率高、结构紧凑、工作可靠和寿命长等,它的性能和动力学行为在很大程度上直接影响着整个设备的工作效率和质量。
由于时变啮合刚度、齿侧间隙和传动误差等非线性因素的存在,对系统的振动产生明显的影响。齿轮系统的振动不仅会产生噪声,引起传动系统的不稳定,而且会加速传动系统的疲劳损害。因此降低其振动噪声,在减少齿轮箱故障、提高机械系统的安全性和可靠性等方面具有重要的工程意义。比例-积分-微分(proportion-integration-differentiation,PID)控制作为控制系统中应用广泛、技术成熟的主动控制方法已被应用到各个领域[1-5]。常规的PID控制器的微分环节和积分环节都是整数阶的,随着分数阶微积分和控制理论的发展,将常规的PID控制器引入到分数阶领域,可以进一步设计出与分数阶相关的控制器。分数阶PID控制器作为常规整数阶PID控制器的推广,它具有很多显著的优点,比如分数阶PID控制器保留了常规PID控制器的结构简单、鲁棒性强等特点,比整数阶PID控制器多了两个可调参数,对于被控系统来说,具有更大的灵活性和更广的适应性,并且对被控系统参数的变化不敏感。因此,近年来分数阶PID控制受到了学术界的广泛关注。Li等[6]将偏航率作为反馈输入,提出了一种基于分数阶PID控制器的偏航力矩控制方法,实现了参数在控制过程中的在线整定。为了提高精馏塔过程的性能,Vahab等[7]提出了一种基于动态蝙蝠算法的分数阶PID控制器,用于控制馏分和底摩尔馏分。Wang等[8]基于传统的PID控制器,给出了加热炉系统的整数阶模型的分数阶PID控制方法,结合仿真分析结果可知该控制方法对于加热炉系统具有良好的控制效果。牛江川等[9-10]利用平均法研究了基于位移反馈和速度反馈分数阶PID控制的单自由度线性非参激系统和非线性非参激系统的动力学特性。另外在考虑间隙、时变刚度、内外激励等影响因素时,建立了分数阶PID控制下的齿轮副动力学模型,利用增量谐波平衡法求得解析解,并详细分析了分数阶PID控制器的系数及阶次对系统无碰撞状态条件下的动力学行为的影响[11],而对于单边碰撞和双边碰撞的情况没有具体分析。Xiao等[12]以时滞为变参数,利用分数阶PID控制算法调节在Caputo分数阶导数定义下的小世界网络模型的稳定性和分岔问题。为了有效地实现在太阳强度和温度快速变化的光伏系统中最大功率点跟踪控制,Rawat等[13]引入分数阶PID控制器,其中微分环节的系数可以在运行时进行更新,积分环节的增益作为瞬时误差的非线性函数在变化。然而,分数阶PID控制算法在齿轮系统振动和噪声控制方面的相关研究还较少,尤其是考虑齿轮系统的碰撞特性时。
另外,非线性因素的存在使得齿轮传动系统表现出强非线性特性。因此在建立齿轮非线性动力学模型时需要充分考虑关键的非线性因素,同时对系统的求解带来了新的挑战。当齿轮传动系统中的传动轴、轴承、齿轮箱等的支承刚度远大于啮合刚度时,可以简化为刚性支承,各个组成部件的振动形式仅为扭转振动,系统模型可简化为纯扭转模型。目前对该系统求解的方法主要包括数值法和解析法。Shen等[14]利用增量谐波平衡法研究了考虑时变啮合刚度和间隙的直齿轮副的非线性动力学,建立了模型的解的统一形式。Huang等[15]在考虑时变啮合刚度、传动误差、齿侧间隙等非线性因素时,建立了高速列车齿轮传动的扭振模型,利用多尺度方法研究了系统的超谐共振和Hopf分岔问题。Kahraman等[16]利用谐波平衡法研究了一对直齿轮副的非线性动力学问题。Xia等[17]建立了考虑时变啮合刚度、齿侧间隙、静传动误差和齿面摩擦的直齿轮副模型,推导出齿轮副的啮合刚度计算的扩展方法,并利用数值方法分析系统的非线性动力学特性。王立华等[18]针对齿轮系统时变啮合刚度和齿侧间隙耦合作用的具体特点,建立了齿轮副的纯扭转振动分析模型,利用数值积分和数值仿真的方法在某些参数域中进行了非线性振动研究。张思进等[19]建立了考虑齿侧间隙时齿轮副主动轮的单自由度非线性模型,通过非光滑系统的Melnikov理论分析了该系统异宿轨全局分岔条件,并给出了每段线性系统的通解。Li等[20]利用快慢分析方法研究了考虑齿侧间隙和外激励作用时的齿轮系统的簇发振荡现象及其产生机理。然而这些研究都是在整数阶微积分基础上进行的,很少考虑涉及分数阶微积分的齿轮传动系统。
综上所述,现有研究多偏重于整数阶齿轮系统的动力学分析,对于基于分数阶PID控制器的齿轮传动系统的振动特性的研究还很少。本文将分数阶PID控制器引入到齿轮系统中,在同时考虑时变啮合刚度、传动误差、齿侧间隙的情况下,建立了基于速度反馈分数阶PID控制的齿轮动力学模型。利用增量谐波平衡法求得的近似解析解分析了分数阶PID控制器对齿轮啮合振动的控制效果。
1 速度反馈分数阶PID控制下的齿轮动力学模型
作为整数阶PID控制器的延拓,速度反馈分数阶PID控制器的时域模型[21]可以表示为
(1)
式中:Kp、Ki、Kd分别为比例、积分、微分环节的可调系数;λ和δ分别为积分和微分环节的分数阶的阶次,满足0≤λ≤1、0≤δ≤1;并且此处采用Caputo分数阶微积分定义。将其引入到考虑时变啮合刚度、尺侧间隙和静态传递误差等因素时齿轮副绕轴的扭转振动无量纲化模型中[22],得
(2)

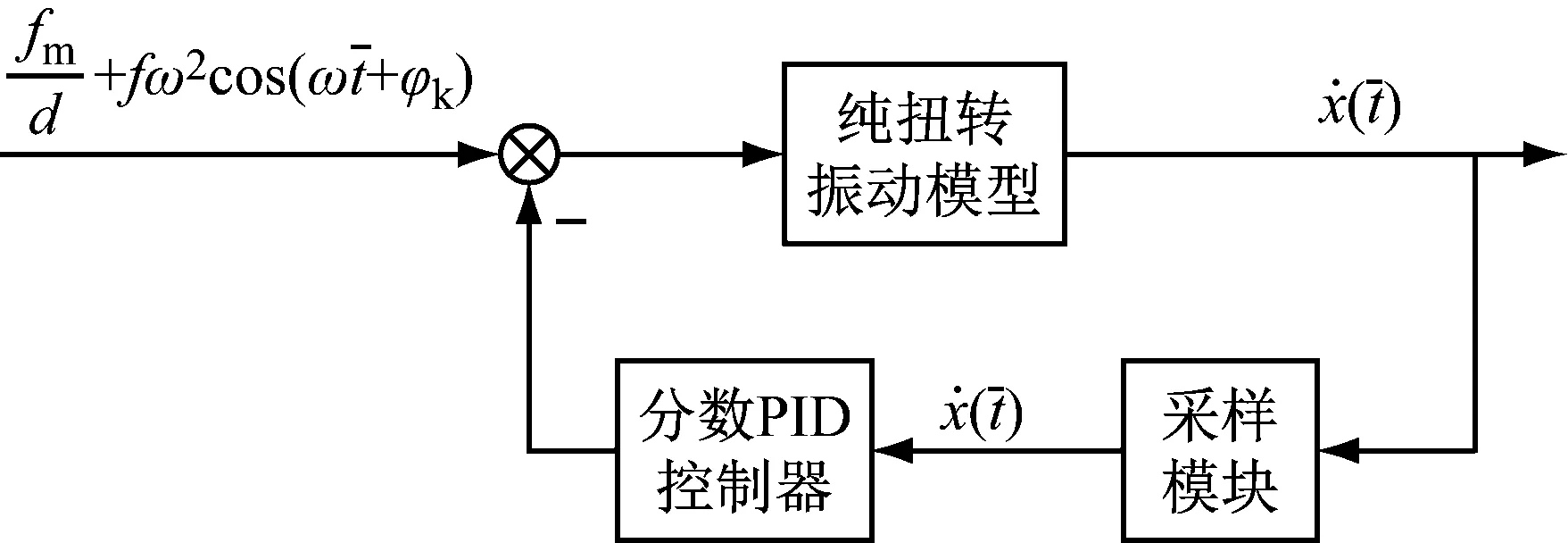
图1 闭环反馈分数阶PID控制系统Fig.1 Closed-loop feedback of fractional-order PID control system
2 基于增量谐波平衡法的高阶近似解析解

ω2x″+(2ζ+Kp)ωx′+k(t)fh(x)+
(3)
设式(3)的N阶近似解析解为
x=x0+Δx0
(4)
(5)
(6)
式中,
X=[1,cost,cos 2t,…,cosNt,
sint,sin 2t,…,sinNt],
A0=[a0,a1,a2,…,aN,b1,b2,…,bN]T
ΔA0=[Δa0,Δa1,Δa2,…,ΔaN,Δb1,Δb2,…,ΔbN]T
将式(4)代入式(3)中,fh(x)在x0处泰勒展开并略去高阶小量,得
(7)
这样复杂的常微分方程,直接求解是非常困难的,此处采用Galerkin法将其近似为代数方程后再求解。在积分过程中,分数阶微积分作为非周期函数,取周期T=∞,对于其他的周期函数取周期T=2π,并平均积分结果,式(7)可以转化为
(8)
式(8)可以看作是关于ΔA0的2N+1阶线性化代数方程组
PΔA0=G
(9)
因此,通过式(9)的迭代计算,可以求出A0的值,从而利用式(4)~式(6)求出原系统的解。
模型中带量纲的参数参考Hou等的研究,无量纲化参数分别取ε=0.25,f=0.1,Kp=0.01,Ki=0.01,Kd=0.1,λ=0.5,δ=0.5。此时由增量谐波平衡法得到的关于幅值的最大值和最小值的幅频响应曲线,如图2中的实线所示。由幂级数展开法得到的数值解如图2中的圈线所示。由图2可知,在该参数条件下,系统响应中不仅存在强烈的主共振响应,同时还存在二次超谐共振和三次超谐共振响应,此时系统处于无碰撞状态。很明显,由数值解和解析解得到的结果基本重合。
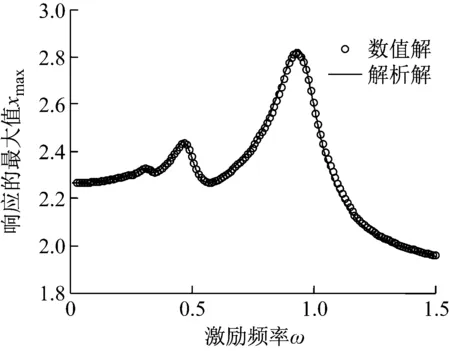
(a)响应的最大值随激励频率变化的情况
3 分数阶PID控制器对齿轮振动的控制效果分析
与整数阶PID控制器相比,由于分数阶PID控制器增加了两个可调节的参数,即分数阶积分项的阶次和分数阶微分项的阶次,因此分数阶PID控制对齿轮系统振动的控制效果不仅与比例、积分、微分三项的系数密切相关,而且与分数阶积分项和分数阶微分项的阶次直接相关。在第2章的参数条件下,通过调节Kp、Ki、Kd、λ、δ其中的一个参数,来分析各个参数对齿轮啮合过程中共振幅值、共振频率及碰撞状态的影响。
3.1 分数阶PID控制器各项系数对齿轮振动的控制效果分析
为了分析分数阶PID控制器比例环节和积分环节的系数对系统振动特性的影响规律,图3和图4分别画出了不同的Kp和不同的Ki对应的系统的幅频响应曲线。由图可以看出,随着Kp和Ki的增大,响应的幅值的最大值均减小,最小值均增大;共振发生的位置稍微向右偏移,但不是特别明显。碰撞状态没有发生变化。
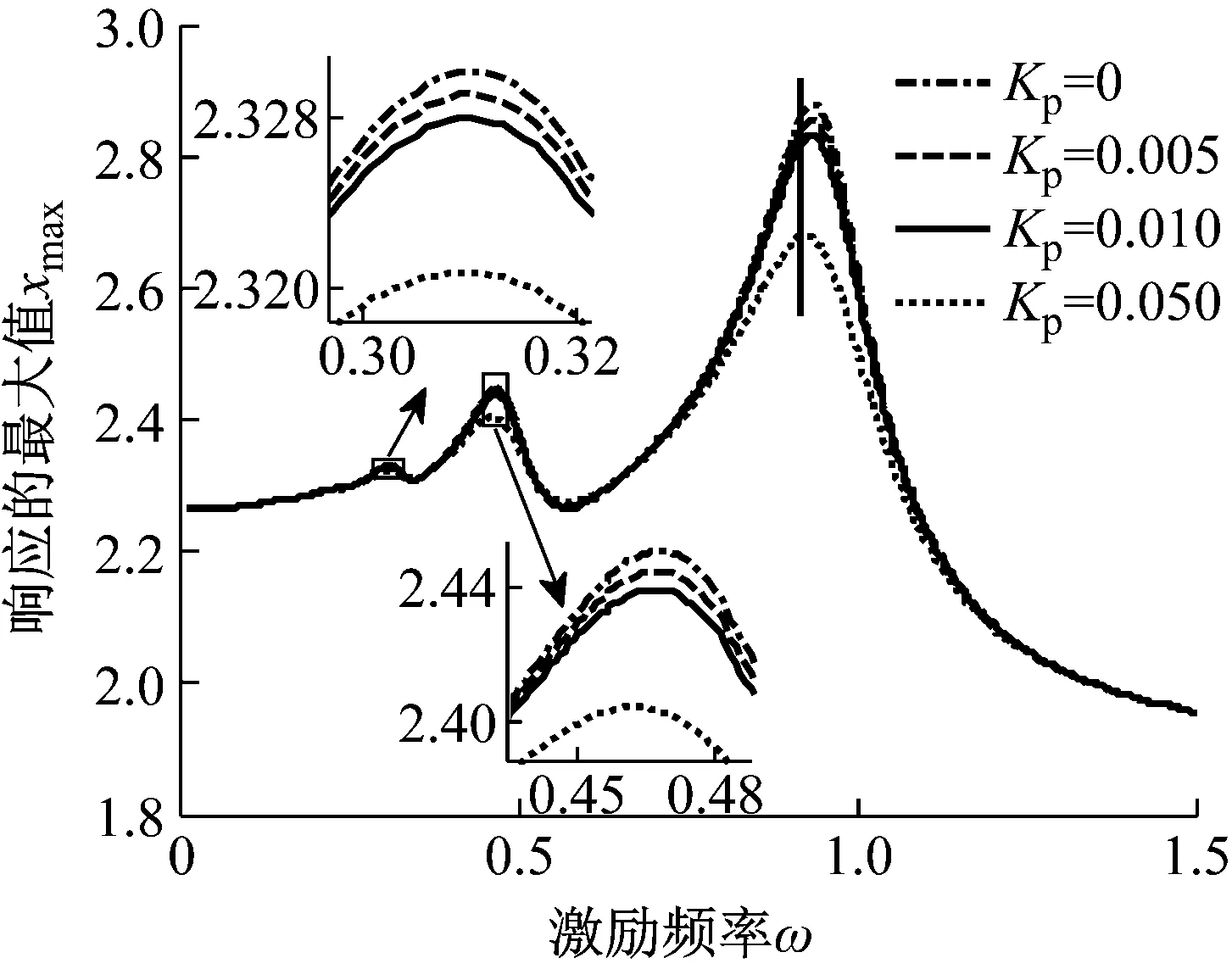
(a)Kp对幅频曲线最大值的影响
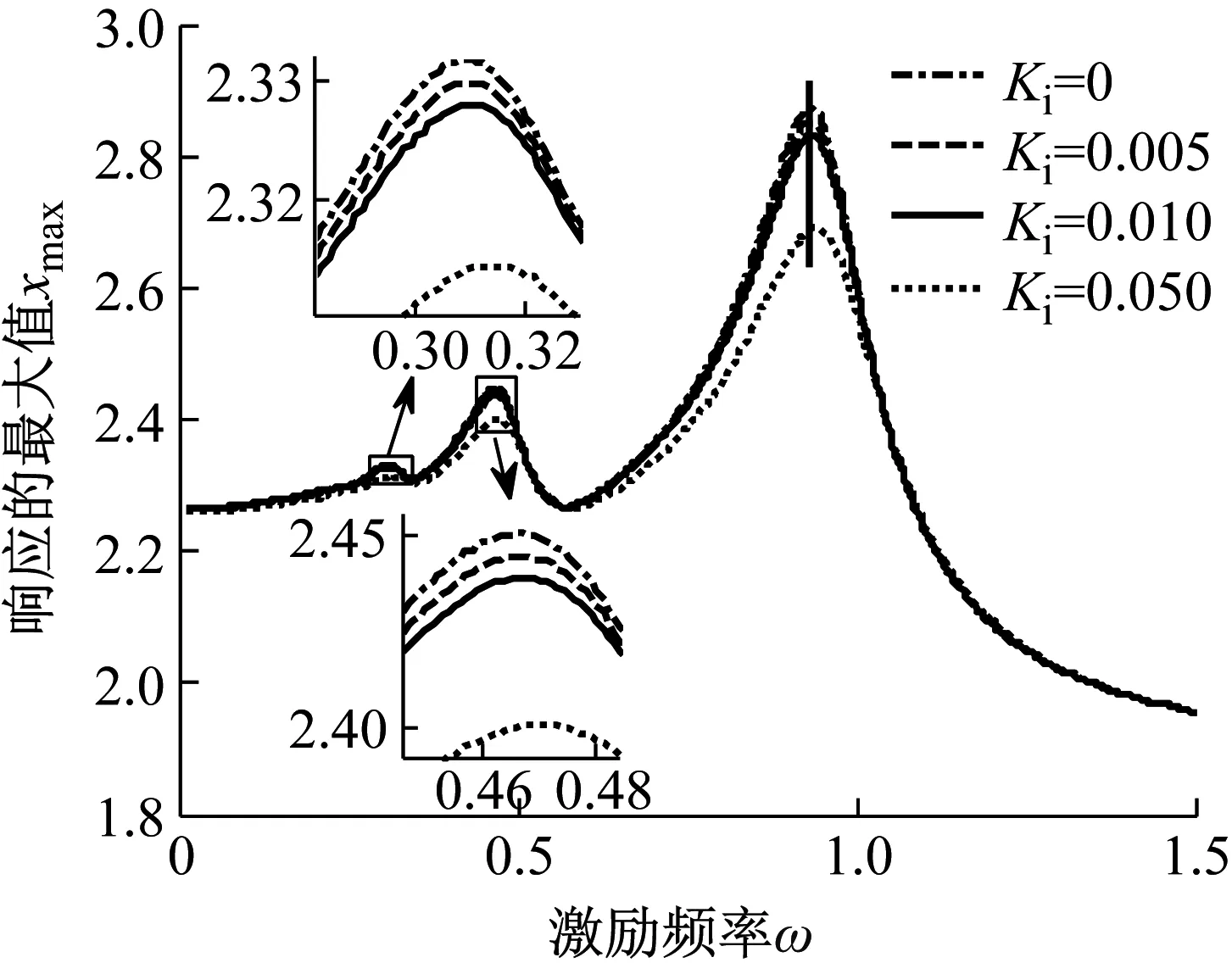
(a)Ki对幅频曲线最大值的影响
图5是分数阶PID控制器的微分环节系数发生变化时,对应的幅频响应曲线。由图5可知:Kd的变化不仅影响响应的幅值的大小和发生超谐共振和主共振的位置,还影响系统的碰撞状态。即随着微分环节系数的增加,响应的最大值随之减小,相反最小值随之增大,同时共振发生的位置左移,系统的碰撞状态也随之发生变化,由最开始的双边碰撞转化为单边碰撞,当Kd=0.1时,系统处于无碰撞状态。

(a)Kd对幅频曲线最大值的影响
3.2 分数阶PID控制器的阶次对齿轮振动的控制效果分析
图6和图7分别为分数阶PID控制器的积分环节和微分环节的阶次变化时对应的系统的幅频响应曲线。由图6、图7很明显可以看出:随着λ的增大,二次超谐共振和主共振的幅值的最大值增大,最小值减小;而三次超谐共振的幅值的最大值减小,最小值增大;共振发生的位置右移;系统的碰撞状态不受积分环节分数阶阶次的影响,一直处于无碰撞状态。随着δ的增大,超谐共振和主共振的幅值的最大值增大,最小值减小,共振发生的位置左移,系统的碰撞状态随着δ的增大,由无碰撞转化为单边碰撞,当δ继续增大时,系统进入双边碰撞状态。

(a)λ对幅频曲线最大值的影响

(a)δ对幅频曲线最大值的影响
3.3 分数阶PID控制器和整数阶PID控制器的控制效果比较
图8是系统在不同方式的控制器作用下的响应图。基础参数为ε=0.25,f=0.1,其中实线是在分数阶PID控制器下的系统响应,即Kp=0.01,Ki=0.01,Kd=0.1,λ=0.5,δ=0.5。双划线是在整数阶PID控制器作用下的系统响应,此时其他参数与分数阶PID控制下的参数取值一致,但是积分环节和微分环节的分数阶的阶次均取为1。点线绘制的是当Kp=0,Ki=0,Kd=0时,即无PID控制器条件下系统的幅频响应。由图8可以看出:在分数阶PID控制下的系统处于无碰撞状态,而相同的条件下,在整数阶PID控制器和没有PID控制器的作用下,系统响应均出现双边碰撞。另外,不论是超谐共振还是主共振,分数阶PID控制下的幅值的最大值比其他两种情况下的值小很多。由此可以看出,分数阶PID控制器的控制效果明显优于相同系数的整数阶PID控制器的控制效果,并且两种控制器的控制效果都比没有控制器的系统响应好一些。

图8 不同控制器作用下的幅频响应曲线Fig.8 Amplitude-frequency response curves for different controllers
在实际工程应用中,传动系统的动力学参数常存在一定的不确定性,如啮合刚度系数和激励幅值等,进而造成系统响应具有一定的不确定性。为了讨论分数阶PID控制器对系统参数的鲁棒性,图9和图10分别给出了在不同的啮合刚度系数和不同的激励幅值的影响下,含有整数阶PID控制器和含有分数阶PID控制器时系统响应的幅频曲线。由图9可以看出:随着啮合刚度系数的不断增大,超谐共振和主共振的幅值的最大值均增大;并且随着ε的增大,系统的碰撞状态由无碰撞状态转化为单边碰撞状态,再转化为双边碰撞状态。但是超谐共振和主共振发生时对应的频率的大小没有受到啮合刚度系数的影响。另外,随着激励幅值的增大,响应的幅值的最大值减小;系统的碰撞状态由双边碰撞状态转化为单边碰撞状态,再转化为无碰撞状态。同样,超谐共振和主共振发生的位置没有受到激励幅值的影响。由图10可以看出:当ε或f变化时,只对超谐共振和主共振的最大幅值产生一定影响,而系统的共振频率和碰撞状态均不受影响。因此,与整数阶PID控制器的控制效果相比,分数阶PID控制器能够显示更好的性能,同时也具有一定的鲁棒性。

(a)ε对幅频曲线最大值的影响

(a)ε对幅频曲线最大值的影响
4 结 论
(1)利用增量谐波平衡法求得的含有时变啮合刚度、齿侧间隙、传递误差和含有分数阶PID控制器的齿轮副动力学模型的高阶近似解析解,与直接用幂级数展开法得到的数值解吻合度很高。
(2)通过调节分数阶PID控制器各环节的系数和分数阶阶次可以对响应幅值的大小和共振频率进行控制。另外,分数阶PID控制器微分环节的系数和阶次还可以用来控制系统的碰撞状态。
(3)通过与模型整数阶PID控制器和无PID控制器相比较,说明分数阶PID控制器对系统振动特性的控制效果明显优于相同系数的整数阶PID控制器的控制效果,尤其是对碰撞状态的控制。与整数阶PID控制器相比,无论是啮合刚度系数变化时,还是激励幅值变化时,分数阶PID控制器都能够显示更好的性能,同时也具有一定的鲁棒性。
