家用地板清洁机器人机械结构的平台化设计
2021-12-20耿向前闫惠阳
李 斌,耿向前,闫惠阳
(河南工程学院 机械工程学院,河南 郑州 451191)
经济的发展提高了人们的生活水平,家用地板清洁机器人应运而生。它可以自动规划路线,高效清洁地板,一经问世即获得了消费者的欢迎。但是,个性化的家庭装修风格对地板清洁机器人提出了更多的个性化要求,在生产中实现“大规模+定制化”以获得更广阔的市场,已成为生产企业亟待实现的目标。
1 平台化设计方法
1.1 产品平台化的概念
产品平台化的理念最初是由一些跨国汽车企业在20世纪80年代提出的[1],汽车企业以一定的零部件组合方式构成基于相同平台的不同车型,为设计研发带来了极大的便利。不同于模块化设计,平台化设计更加注重特定产品类型中高度重合的零部件的共用设计,有规划地开发一套产品共用结构系统和接口,可满足不同批次生产并提高开发效率[2]。因此,产品平台化具备实现系列产品派生及拓展的能力,是“柔性制造”的知识成果,可以满足不同细分市场和消费者的个性化需求,有利于生产企业降低研发成本,缩短研发周期,提高产品性能[3]。
1.2 家用地板清洁机器人平台化设计的意义
目前市场上有很多不同品牌的家用地板清洁机器人,但大部分只具有扫地功能而未考虑地板类型,并不能很好地满足不同家庭的需求。同时,家用机器人行业的准入门槛并不高,行业结构分散,信息不对称又竞争激烈,致使大部分生产企业过分注重产品的生产成本而忽略了产品的生命周期价值,无法为持有地板清洁机器人的家庭提供更多持续的个性化服务。
引入汽车行业成熟的产品平台化设计方法,对接不同需求,配合模块化设计,可实现在同一产品架构下地板清洁机器人的通用化、系列化,不仅可以帮助企业进一步缩短产品设计周期、降低设计和生产成本,还可以通过数字技术集成各个端口的数据,在工业标准下对设施的物理和功能特性进行统一管理,并对其相关项目的全寿命周期信息以可计算的形式表现[4],为将来引入中小型产品生命周期管理(MSPLM)奠定基础。
2 总体方案设计
家用地板清洁机器人驱动系统的动力一般采用驱动电机,通过联轴器或带传动与行走机构相连;控制系统的PLC,辅助系统中的充电电池、充电接口等都有现成产品可选用,可作为功能模块处理;清洁执行机构需要具备扫地、拖地、吸尘、地板打蜡等不同功能,也需要作为功能模块来设计;行走机构与外壳对于不同功能的机器人有高度共用性,可设计为系列产品的平台。家用地板清洁机器人系统架构如图1所示。

图1 家用地板清洁机器人系统架构Fig.1 The system structure for household floor cleaning robot
在网上购物平台对家用地板清洁机器人买家评语调查发现,在满足功能的前提下,消费者对此类物品的关注点往往集中在外观、收纳、价格、售后服务等方面,而从企业角度来说,则更多考虑现有生产设施、成型工艺、良品率等[5]。综上考虑,本家用地板清洁机器人平台仍采用圆柱形结构,总体方案见图2。

图2 家用地板清洁机器人平台Fig.2 The platform for household floor cleaning robot
3 家用地板清洁机器人平台建模
3.1 平台建模
在SolidWorks软件里建立底盘与外壳的模型(图3)。利用三维软件建立家用地板清洁机器人平台模型,并组装成虚拟样机,可以更直观地展现家用地板清洁机器人的全貌,让设计师更加关注细节,并对设计结果进行检验。限于篇幅,建模过程这里不再赘述。
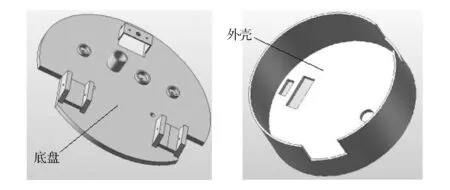
图3 底盘与外壳Fig.3 Chassis and shell
3.2 平台参数化设计
家用地板清洁机器人平台参数化设计的意义在于快速、方便、高效地进行该产品系列型号的设计。把外壳直径定为该机器人平台唯一的全局变量进行参数化设计,通过方程式关系完成各个零件间的尺寸驱动,可以很方便地生成一系列外观相似但大小不同的地板清洁机器人,大大缩短了新产品开发的时间。
3.2.1底盘参数化设计
首先在绘图区域单击鼠标右键,选中“显示特征尺寸”,系统便自动显示出底盘模型的所有特征尺寸(图4);然后在“工具”菜单中找到“方程式”选项并打开,弹出“方程式、整体变量及尺寸”对话框(图5)。选择底座直径为全局变量,激活“方程式”下面的空格,选择底盘上4个小孔距底盘中心的尺寸,系统会自动出现“D8@草图5”,这是该尺寸在系统中存储的代号,接着在“数值/方程式”下的空格点选“底盘直径”并输入“/8”,建立两尺寸间的关系,系统会自动计算出该尺寸为48.75 mm。采用同样的方法,找出所有关联尺寸与全局变量的方程式关系并一一添加。

图4 底盘参数化设计(单位:mm)Fig.4 Parametric design of the chassis(unit:mm)

图5 方程式、整体变量及尺寸对话框Fig.5 Equations, integral variables and size dialogue box
3.2.2产品平台模型重建
依照以上方法,分别对外壳、控制模块箱体进行参数化设计,并添加各零件间尺寸关联,只保留“外壳直径”这个全局变量,通过方程式关系来完成各个零件间的尺寸驱动。整体结构设计界面如图6所示。
输出方程式关系如下:
"外壳直径"= "D1@草图1@外壳<1>.Part"
"D1@草图1@底座<1>.Part"= "D1@草图1@外壳<1>.Part" * 1
"D1@草图1@箱体<1>.Part"= "D3@草图5@底座<1>.Part" * 2 - 118
其中,"D1@草图1@底座<1>.Part"是底座直径,它与外壳直径相同,"D1@草图1@箱体<1>.Part"是箱体底面长度,通过方程式驱动使其与全局变量相关联。此时改变全局变量的值,打开方程式对话框,点击“重建模型”,就会自动生成新的模型。
4 平台的应用
基于平台设计的家用地板清洁机器人基本型见图7。在此产品平台的支持下,设计师可以依据不同顾客的需求完成执行模块的详细设计,与产品平台对接即可生成不同系列的产品。打蜡机器人、清扫机器人和拖地机器人的执行模块如图8所示。
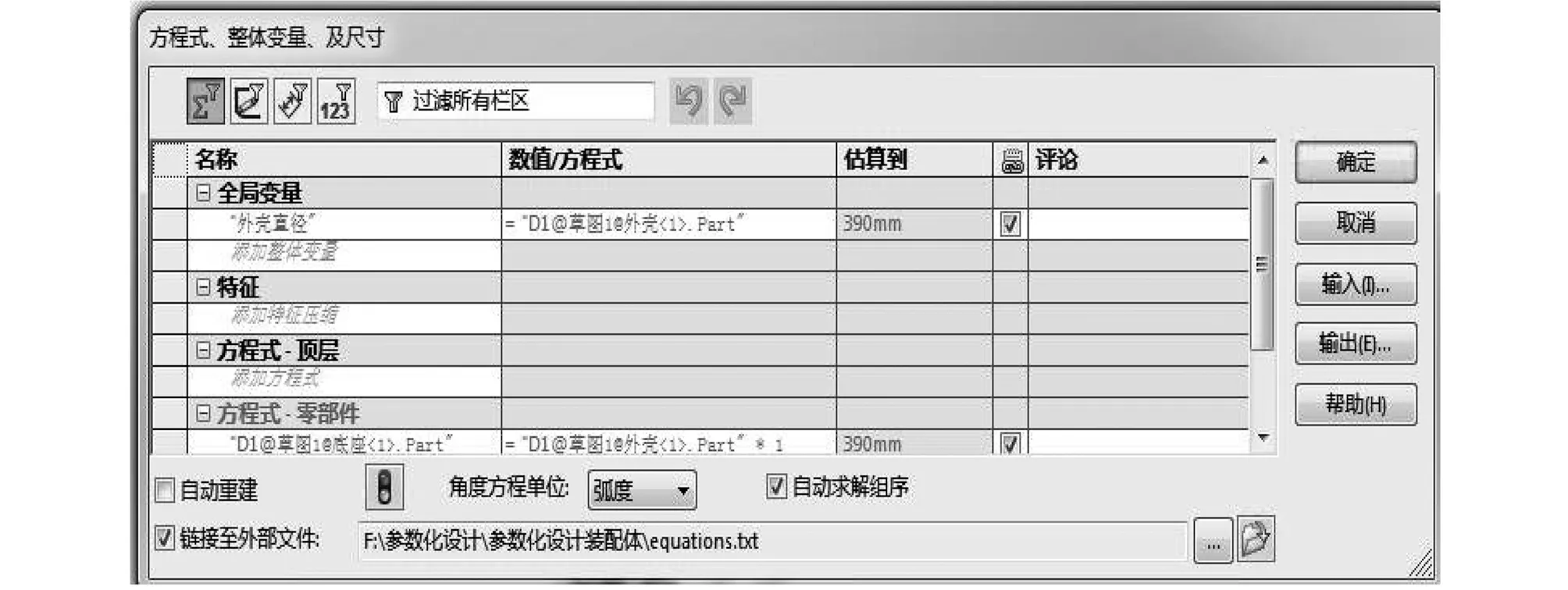
图6 整体结构参数化设计Fig.6 The overall structural parametric design
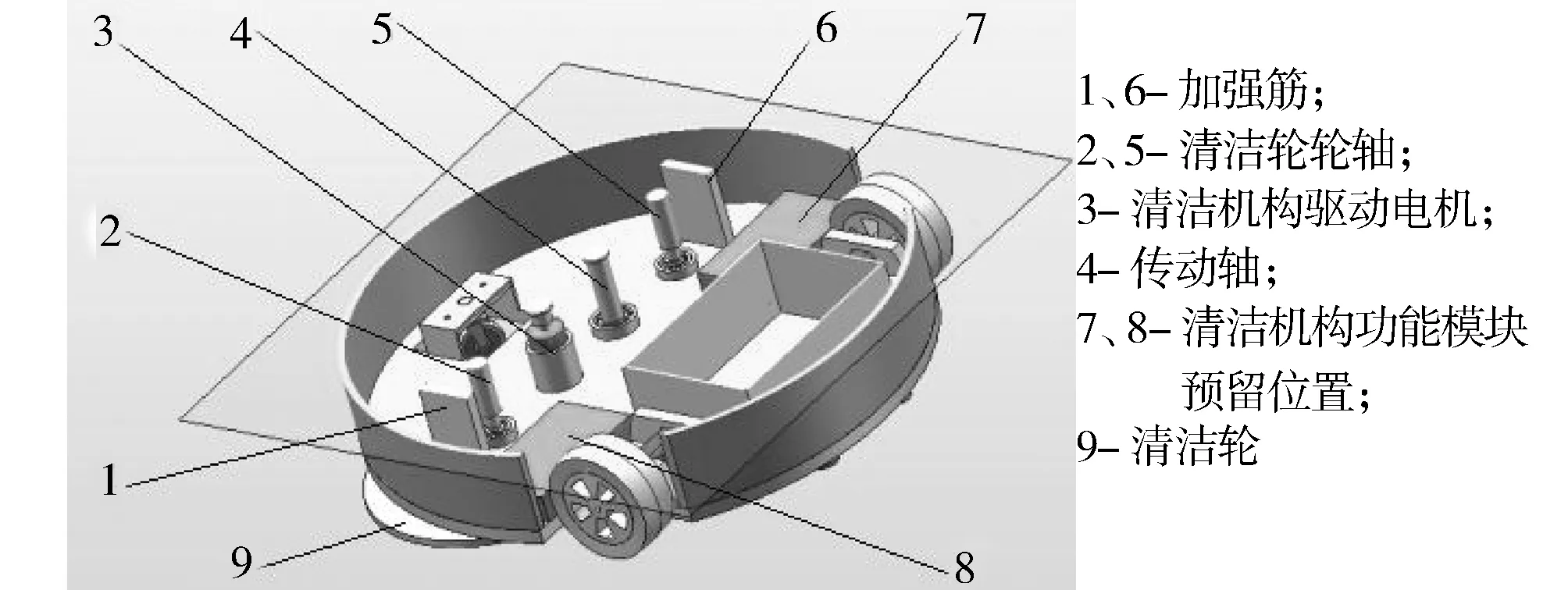
图7 基于平台设计的家用地板清洁机器人基本型Fig.7 The basic floor waxing robot designed base on the platform

图8 家用地板清洁机器人功能模块Fig.8 The function module for household floor cleaning robot
5 结语
产品平台化、功能模块化是平台化设计的基本指导思想。将此思想引入家用地板清洁机器人的设计中,可使产品的基本结构与功能模块化,进而提取出可高度共享的模块,以确定家用地板清洁机器人产品平台。在平台的基础上依据顾客需求开发不同的功能模块进而形成系列产品,可以极大缩短地板清洁机器人新产品的开发周期,降低开发成本,提高企业对市场的快速响应能力。
