无人机多点位航拍高分辨率三维数字露头建模
2021-12-20詹容若罗晓容魏荣浩马楚萱
詹容若,段 亮,罗晓容,史 毅,魏荣浩,马楚萱
(1.西北大学 地质学系,陕西 西安 710069;2.西北大学 大陆动力学国家重点实验室,陕西 西安 710069;3.中国科学院地质与地球物理研究所,北京 100029;4.中国科学院大学 地球与行星科学学院,北京 100049)
0 引 言
数字露头模型(digital outcrop models,简称DOMs)是采用三维地面激光雷达数据、遥感图像、探地雷达数据等,对露头地质剖面所有地质信息进行数字化整合,实现多种地质特征综合解释的目标。DOMs也称为虚拟露头模型(virtual outcrop model),是空间中具有X、Y和Z坐标点标定的三维模型,通常以点云或三角网格的形式呈现[1]。点云是一系列具有X,Y和Z三维空间指向的特定点的集合,包含坐标信息和颜色信息[2]。三维网格是由点云模型绘制成的模型,更接近现实[1]。三维模型能够克服传统原位测量方法的局限性,通过数字曲面来表示所研究区域的实际情况[3]。
与传统野外研究方式相比,DOMs能够克服二维图像数据拼接造成的露头几何形态成像畸变,以不同视角永久保存露头特征。高分辨率三维模型能够异地访问,重现野外关键细节,实现野外露头的开放和共享,尤其对于难以靠近的出露区,DOMs能有效扭转这些露头难以观察和描述的局面。
这样的数字露头已经在地学领域内得到了广泛的应用,SMITH,CHESLEY,VOLLGGER,ASSALI,CORRADETTI通过数字露头模型展开关于岩石单元、岩性接触和地质构造几何图形的连续空间观测[4-9],FONSTAD,MICHELETTI基于数字露头模型调查地貌演化过程[9-10],ANTONIO,ESPOSITO以数字露头模型为蓝本进行自然资源和地质灾害评估[11-12],印森林、朱如凯、郑剑锋等利用数字露头模型展开剖面砂体在空间构型研究,刻画不同类型沉积体形态与结构[13-15]。DOMs相对于传统的剖面解释,带来了新的线索[16-18],同时也受到国内外广泛的关注与研究,MARTINSEN、NESBIT对于三维数字露头建模这一技术的应用提供了新的思路与方向[19-21]。
分辨率是决定DOMs品质的关键,影响着三维模型的清晰程度和重现野外各种关键细节的能力。除硬件设备和建模软件的影响外,无人机图像采集方式、光栅重合(图像配准)程度和光线条件等因素直接影响着三维数字露头模型的分辨率。目前已报道的无人机数字露头模型普遍使用平面排线式航飞进行多点位数据的采集[22-27],且主要针对近乎垂直出露的剖面。面对不同几何形态的复杂露头,基于规范排线法航飞和图像采集的三维DOMs在数据完整性和空间分辨率方面的表现不容乐观,难以保证建模的成功率以及露头诸多关键细节的输出和再现。
目前,建立DOMs的方法主要有激光雷达和数字摄影测量2种。2种技术手段在所需设备、数据类型和处理方式方面有着实质性的差异[28]。相对于数字摄影测量,激光雷达的优势是能对地表植被进行校正。然而,激光雷达技术成本高、设备重、电池续航时间相对较短的特点阻碍了该技术在野外露头地质建模研究中的广泛应用[3]。随着点云数据和数字图像处理等技术的进步,数字摄影测量技术已逐渐成为激光雷达技术的替代方法[21,28-32]。数字摄影测量技术采用SfM(Structure from Motion)算法,根据不同角度拍摄的同一场景的多幅图像来重建三维物体,从而得到可视化三维数字模型[5,27]。SfM算法依托于专业软件,自动识别每张图像中特征点,提取特征数据库,使用迭代束调整程序恢复相机参数[33]。SfM与传统的摄影测量主要区别在于,前者使用自动特征检测和匹配算法计算图像间相对位置,无需任何关于场景结构、相机的位置和方位的三维信息。从关键点提取到场景精确重建,整个过程具有高度自动化的优势[34]。
在野外地质露头建模中无人机广泛应用于数字摄影测量的数据获取[35]。无人机由于其自身机动灵活且易于运输,成本效率高、能克服空间限制获取露头的图像数据,随着各项性能的提高,消费级无人机已经具备捕捉高分辨率图像的能力[36],逐渐成为三维数字露头建模的主流方式,广泛应用于各项地质调查和专业研究中。
通过对鄂尔多斯盆地典型露头几何形态划分,对不同类型的露头采用有针对性的航线规划,以期达到提高建模成功率,降低对特定建模软件的依赖,实现各类复杂露头厘米级高分辨率三维DOMs建立的目的。为进一步挖掘DOMs的应用(如可重现的厚度、层/面理和线理的实测和定量统计等)提供高质量的数据支撑。
1 数字露头模型
基于无人机的三维数字露头建模主体由数据采集、现场预处理、数据处理和成果输出4个阶段组成(图1)。
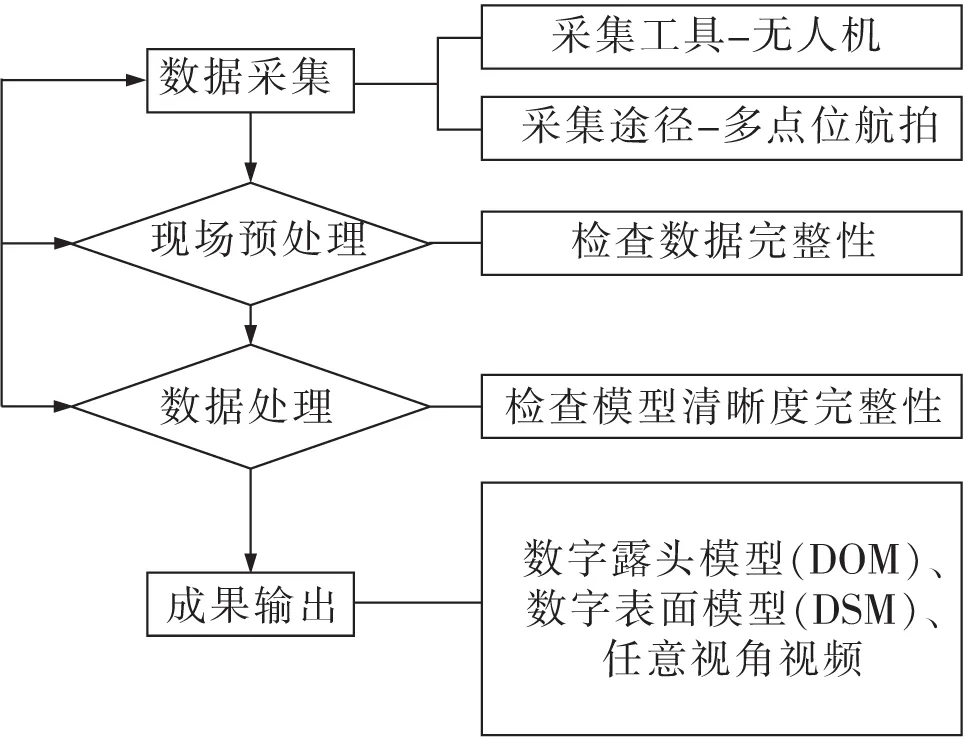
图1 三维数字露头建模环节Fig.1 3D digital outcrop modeling process
1.1 数据采集
在数据采集前需要提前检查和调试无人机、遥控器、安装无人机配套软件的平板电脑等,确保现场工作顺利开展。常见的无人机多为多旋翼无人机,具有轻巧便捷特点的同时有强大的避障功能,由飞行器、云台、影像传感器,遥控器等部件共同构成。无人机通过传感器获取实时图像、高程、坐标等信息,构建飞行器周围的三维地图并确定自己的位置。需要注意的是,目前无人机单块电池的续航时间基本上在半个小时以内。实际飞行时间受温度以及操作的影响相应缩短。
二维图像数据的采集是三维数字露头建模中及其关键的环节,数据的采集方式决定了露头模型的质量。在开始图像数据采集前,有必要对露头所处位置的自然环境进行近距离的观察。同时,地球自转和公转的变化都会影响模型成像纹理。数据采集过程中,通常采用较短的相机基线即连续拍摄位置之间的距离,以最大限度地增加重叠,并尽可能地覆盖露头区[36]。由于自然环境和客观条件的限制,对于成功重建露头所需的最小图片数量很难提供明确具体的数值,最低要求是在最少3张照片中可见相同的特征[33]。图片数据量不足或者重叠度不够时,模型会出现空洞或变形,数据量过多时,在增加点云数据处理难度的同时会增加对计算机配置的要求和消耗更多的处理时间。因此针对不同类型的野外露头,现场选择有针对性的航飞路径和图像采集方式很有必要。
由于SfM算法允许有选择的使用图像数据[2],所以在计算机配置有保障的条件下,更多的数据量更有利于成功实现三维露头模型高精度的重建。
1.2 数据处理
数据处理环节由预处理和处理组成。预处理环节主要是完成图片的初步匹配,快速检查图像数据是否能预处理出一个低精度的数字模型。无人机数据采集完毕并不意味着野外现场工作的结束,根据预处理效果及时进行数据补充采集,避免由于地球运动导致数据属性变化模型失真。
数据预处理无误后开始建立高精度三维数字模型。专业的建模软件是处理二维数据获取三维信息,建立高精度三维数字模型的必备工具。软件的顺利运行与计算机性能配置有极大的联系。常见的建模软件有ContextCapture,PhotoScan,Acute3D等,文中所呈现的模型均由Pix4D和Reality capture这2款软件中完成,2款软件特点突出,差异后述。建模软件基本遵循数据导入、识别特征点、生成点云及纹理、成果输出原则(图2),不同软件或略有差异。
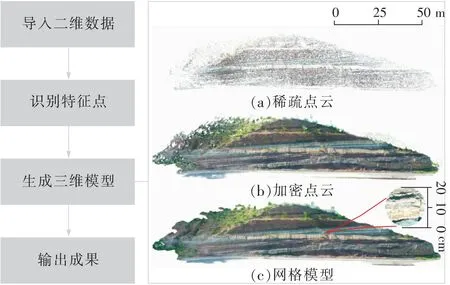
图2 薛峰川剖面二维数据在建模软件中的操作步骤Fig.2 Operation steps of Xuefengchuan reservoir profile 2D data in modeling software
照片集合通过摄影测量学基本原理与计算机视觉区块算法的结合实现了自动处理,快速提取数百万表面点的相对三维坐标[33,37]。通过多个具有一定重叠度的照片提取特征点,这些特征点被从一幅图像追踪到另一幅图像,使无人机位置和物体坐标的初始定位成为可能,然后使用非线性最小二乘最小化迭代细化定位[36],通过自动识别多幅图像中匹配特征,恢复无人机姿态并实现野外数字露头模型的重建。高精度点云及纹理清晰完整无误时即可输出模型。
Pix4D是集全自动、快速、专业精度为一体的无人机数据处理软件,具有用户友好的界面和简单的工作流程。软件通过Lowe提出[37-38]的尺度不变特征变换(SIFT)算法检测每个图像中由不同尺度的局部像素方差确定的唯一特征点,由至少2个特征点和3个图像组成的轨迹用于点云重建,那些不满足这些条件的将被自动丢弃[39]。通过捆绑块调整对特征点匹配和相机参数的三维几何结构进行优化[40]。初始化处理的成果包括一个稀疏三维点云,由特征点匹配的估计位置(x、y、z)、相机内部方向参数(IOPs;例如焦距和径向畸变)和相机外部方向参数(EOP;例如位置、方向和比例)[37,41]。通过多视角立体(MVS)算法添加可靠的特征匹配点和网格插值执行点云加密,得到的加密点云的点比初始稀疏点云多出103倍以上[42]。加密点云通常被插值到一个连续的三维网格曲面中,该曲面可视为一个三角形不规则网络(TIN),最终实现二维数据的三维重建(图2)。
1.3 输出成果
通过建模软件运行,实现露头二维图片数据的三维重建,生成数字地表模型(DSM)和正射影像图。可通过任意视角旋转模型,选定区域,输出任意面正射图。视频的输出可选择设置输出分辨率、视频时长以及视频航点路径。
野外地质露头二维数据采集质量制约着模型成品的质量。采用均一的航线采集数据容易造成数据缺失导致模型空洞(图3)。因此建立露头几何特征与航线特征的空间关系,以提高二维数据采集质量。

图3 平凉三道沟剖面三维数字模型中数据缺失Fig.3 Data missing in 3D digital model of Pingliang Sandaogou section
2 野外露头几何特征
野外地质露头模型的精度和完整程度取决于输入的图像数据质量,在采集数据过程中,较为普遍的做法是无人机根据计划好的航线进行图像数据采集,这种便捷高效的方式在高空摄影测量中被高频广泛使用。然而在野外地质露头的建模过程中,自动规划航线难以实现对露头地质信息的精细采集,这意味着要实现高质量数据采集首先要对露头进行几何划分。这里将野外地质露头根据其几何特征划分为平面/准平面、曲面、三维组合面3种主要类型(表1)。
平面/准平面露头在水平和垂直方向上大多以近直线方式发育(表1),露头以单一平面形式出露,几何形态显著。常见的露头有陡崖或人为开凿的山体切面。薛峰川石千峰组露头是典型的平面/准平面露头,该露头长约120 m,高约9 m,基本无植被覆盖,轮廓清晰。
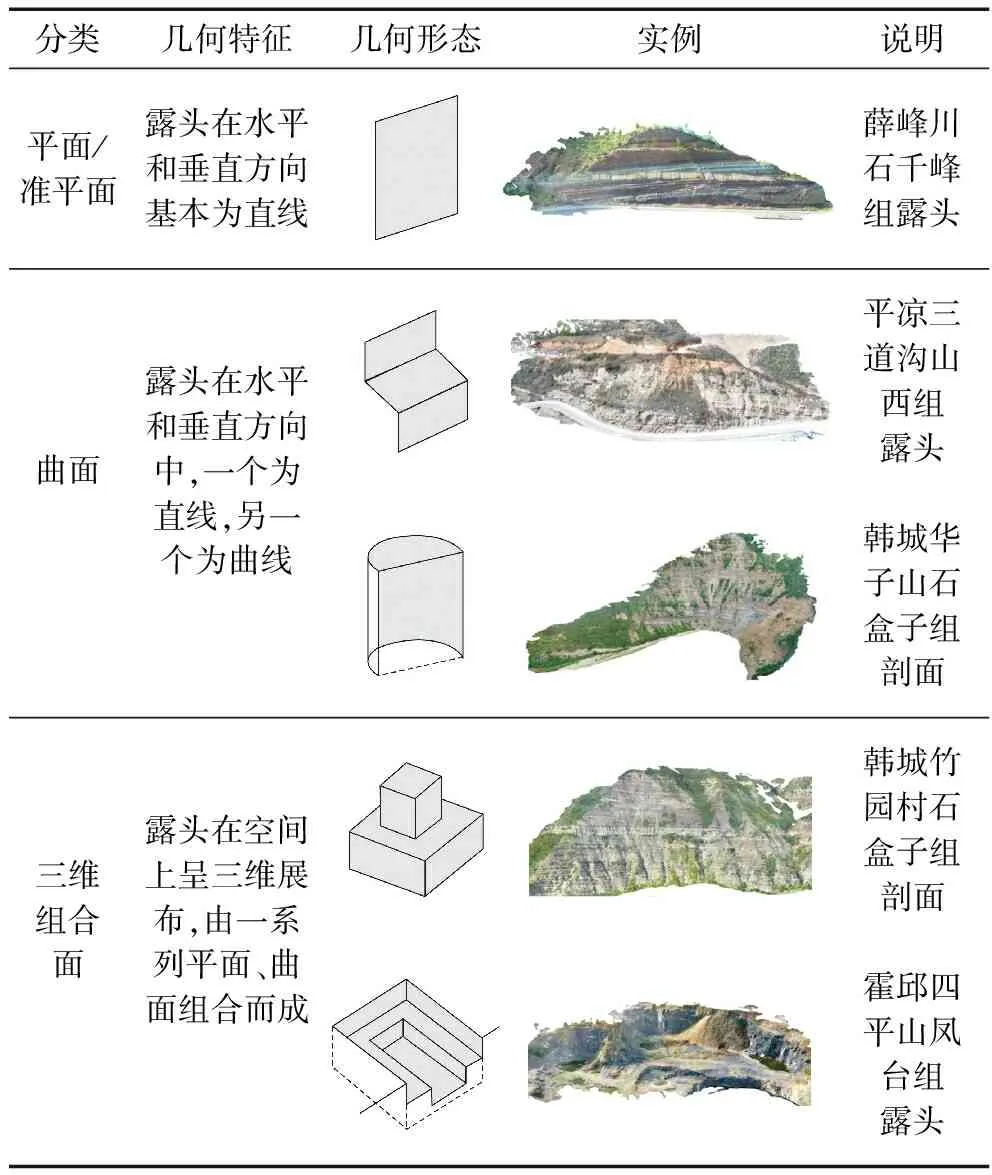
表1 地质露头几何特征Table 1 Geometric features of geological outcrops
曲面露头多见2种方式发育,一种在水平方上基本沿直线发育,在垂向上露头呈曲线发育,典型地貌如阶地。第2种露头在垂向上基本沿直线发育,水平方向呈曲线发育,如自然滑脱面。三道沟剖面长约220 m,高约40 m,露头高边呈折线形态发育。露头主体岩层分布清晰,可见明显岩层段,但风化较严重,典型沉积构造保存欠佳。华子山剖面长约260 m,高约125 m,以细砂岩为主,露头长边呈弧线发育,露头主体出露良好,少有植被覆盖。
三维组合面(表1)露头是野外常见的复杂地质露头,由一系列曲面或平面在三维空间中组合而成,露头纵深变化特征明显。主要分2种,一种正向组合面在地表之上突起明显,出露地层沿山体多个面分布,如山体。第2种负向组合面在地表下呈凹陷形态发育,地层沿坑体侧面或底面发育如矿坑。竹园村剖面长约470 m,高约160 m,主要以砂岩为主,露头长边呈曲线发育,山体表面受流水侵蚀,沟壑明显,同时露头由多个小型山体嵌套组合而成。霍邱四平山剖面长约240 m,高约50 m,主要发育页岩。露头由地表向下凹陷。剖面长边呈复杂的曲线发育,露头主体由于人工开凿表面呈不规则且扭曲破碎的形态。无植被覆盖。
3 航拍点位空间特征与实例分析
建立大尺度模型的数据采集常通过自动规划航线的软件完成,常见的航线规划软件有Altizure,Pix4D,DJI GS pro,RockyCapture等,然而软件规划航线下采集的数据并不能突出典型露头面精细地质信息,这意味着对不同的地质露头要采取针对性航线开展数据采集。基于对露头的几何分类和无人机具备的多种拍摄视角(平行、倾斜和垂直),提出相应的航线规划方案(图4)。
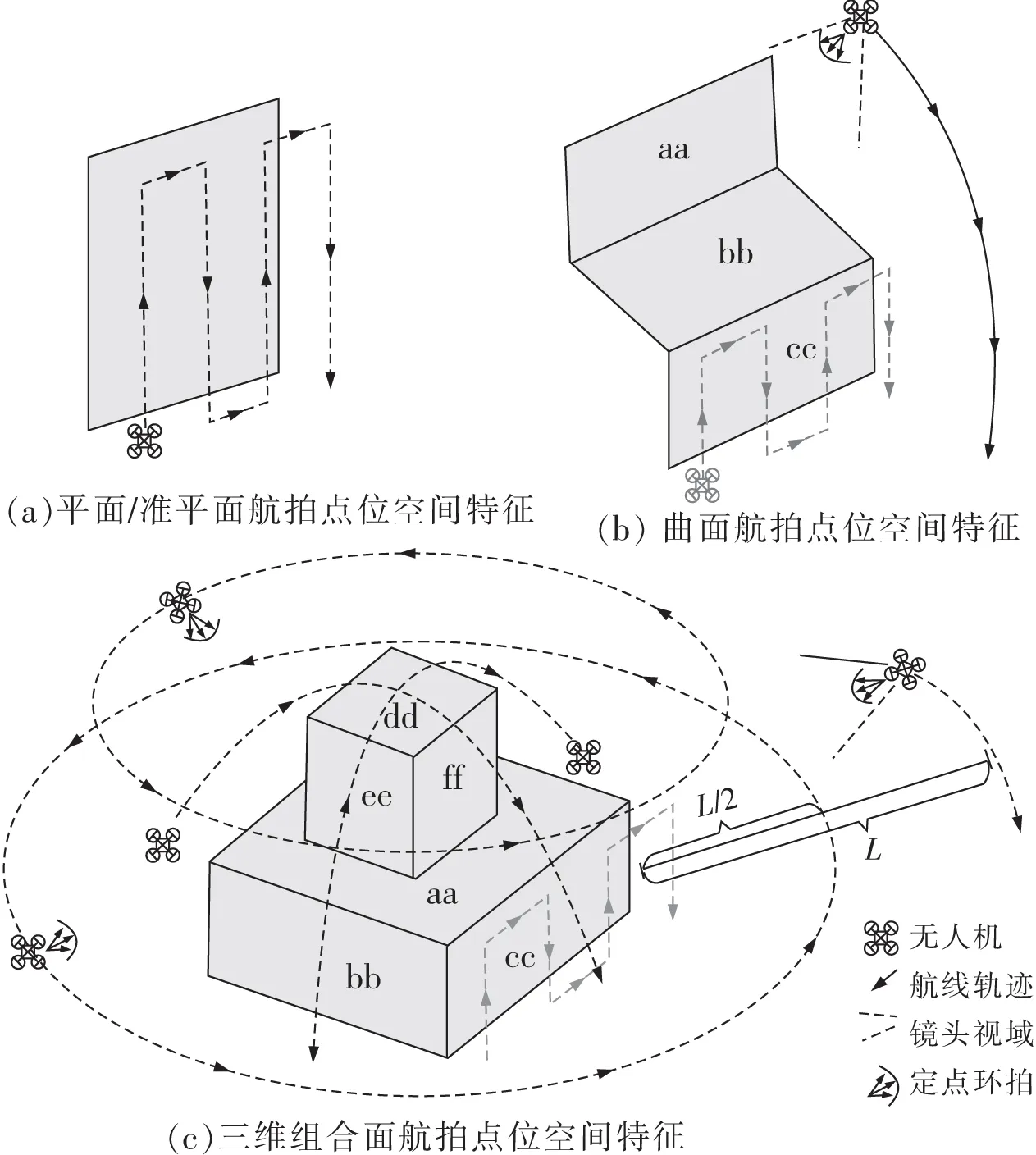
图4 露头几何特征与航拍点位空间关系Fig.4 Spatial relationship between geometric features of outcrops and aerial photography points
3.1 平面/准平面
排线直拍是目前最常见的数据采集航线,多应用在平面/准平面露头、大尺度区域性地貌或城乡规划建模的数据采集环节。通常排线直拍由航线规划软件自动控制无人机采集数据,由于野外露头自然环境复杂,在平面/准平面露头中(表1),根据露头面出露情况手动遥控无人机按照排线式航线飞行并采集数据(图4(a))。所采集的数据质量与模型清晰度和分辨率直接相关,必要时加密航线,保证数据的重叠度避免模型空洞。
薛峰川剖面平面特征显著,出露良好。Pix4D软件对不同视角中航拍点位的记录明确,平面露头二维数据的采集记录了露头高程(图5(b))和长度(图5(c))的变化,反映了露头几何特征与航拍点位空间特征的关系(图5)。
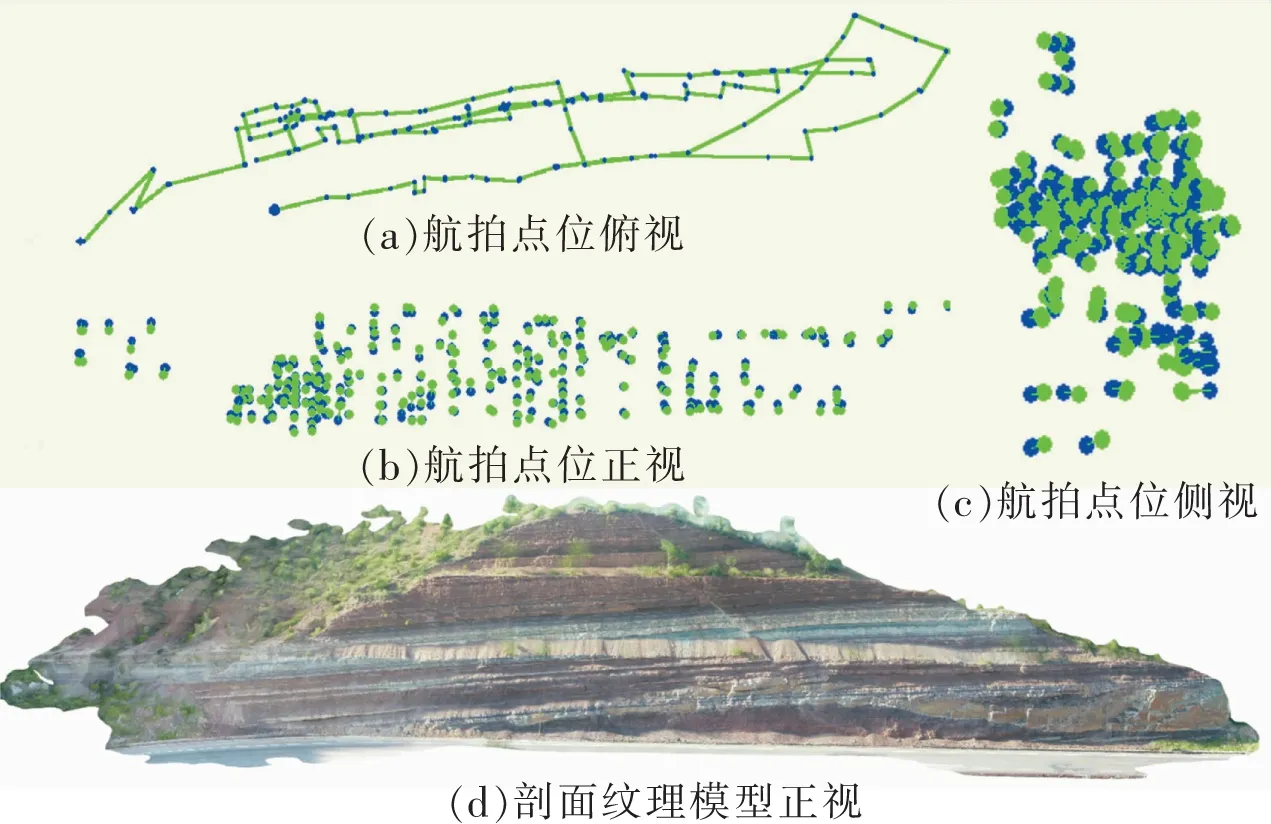
图5 薛峰川剖面航拍点位空间特征Fig.5 Spatial characteristics of aerial photography points in Xuefengchuan section
3.2 曲面航拍点位空间特征
曲面露头(表1)在水平和垂直方两方向上,一个近直线发育,另一个曲线特征显著。曲面数据的采集方式以排线直拍为基础,同时沿露头曲线发育方向采用定点环拍即在每个采集点上,无人机通过旋转镜头拍摄露头面,采集完整的露头图像数据。采集点之间距离以图片重叠度为依据进行确立。排线法主要应用在图4(b)中aa、cc面的数据采集,定点环拍能够捕捉到bb面以及aa、bb、cc三面过度处的数据信息。两者结合能有效的保障数据采集的完整性。
华子山剖面是曲面特征明显的露头之一,图6记录了华子山剖面模型的几何特征与航拍点位的空间关系,在俯视图(图6(a))中航线基本沿露头呈曲线形态,航拍点位正视图(图6(b))基本与露头几何形态一致,在关键位置进行必要加密。航拍侧视图(图6(c))记录了露头高程的变化。
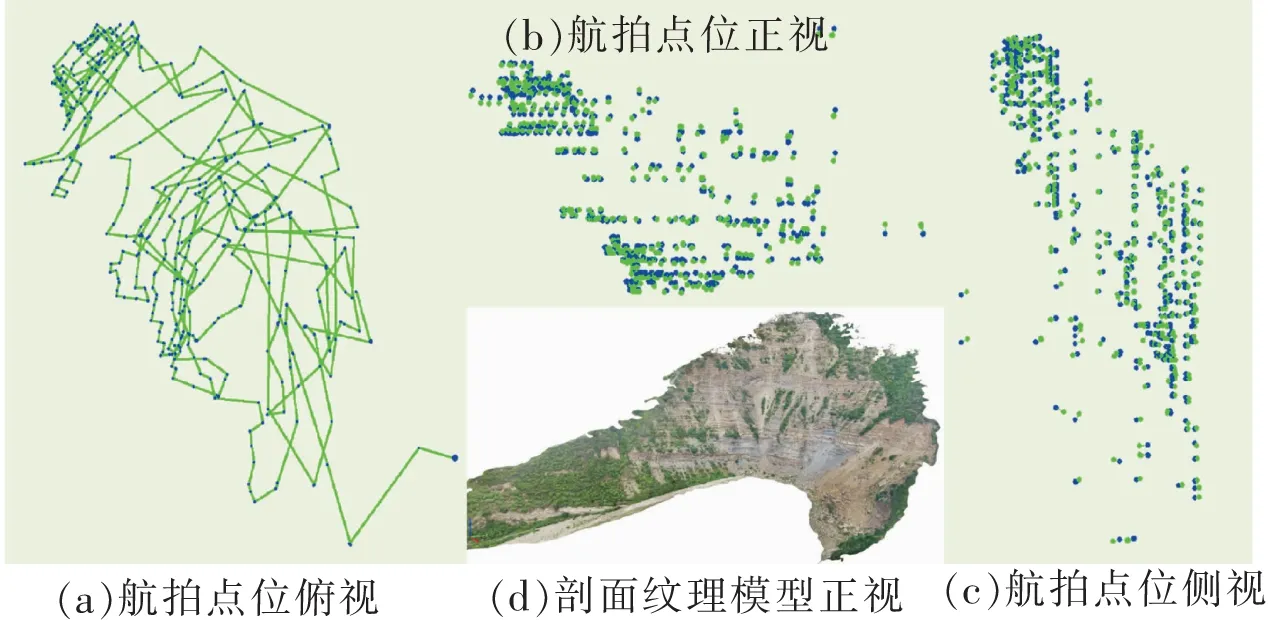
图6 华子山剖面航拍点位空间特征Fig.6 Spatial characteristics of aerial photography points in Huazishan section
3.3 三维组合面航拍点位空间特征
三维组合面(表1)即平面和曲面在三维空间中的组合,是野外露头中十分复杂的露头几何形态,各面之间连接关系复杂。采用平行、倾斜、垂直视角,通过不同高程环飞定点环拍结合排线直拍的方式采集3位组合面的图像数据(图4(c))。排线直拍采集bb,cc,ee和ff面数据,通过不同高程上环绕露头航拍结合在采集点旋转镜头环形拍摄采集了aa,dd面以及个面之间连接处的数据。环露头航线的水平距离以图片重叠度为依据,最远航线能实现无人机视域内对露头的全景捕获,与露头距离为L。最近航线的无人机数据采集决定模型分辨率的上限,与露头距离至少保证L/2,以此为基础,根据露头面积大小适当加密航线。在每个采集点通过旋转镜头环形拍摄,加密数据量。对三维组合面采用不同高程环飞定点环拍结合排线直拍相结合的方式,能够采集全面高质量的二维数据,建立高清晰度厘米级数字露头模型。
竹园村剖面三维组合复杂,Pix4D软件中航拍点(图7(a))记录了露头主体发育情况,特别是露头长边的曲线特征。航拍点位的正视图(图7(b))记录了对重要层位进行二维数据的加密采集情况。图7(c)记录了竹园村露头的高程变化以及重要层位在露头分布的高程特点。
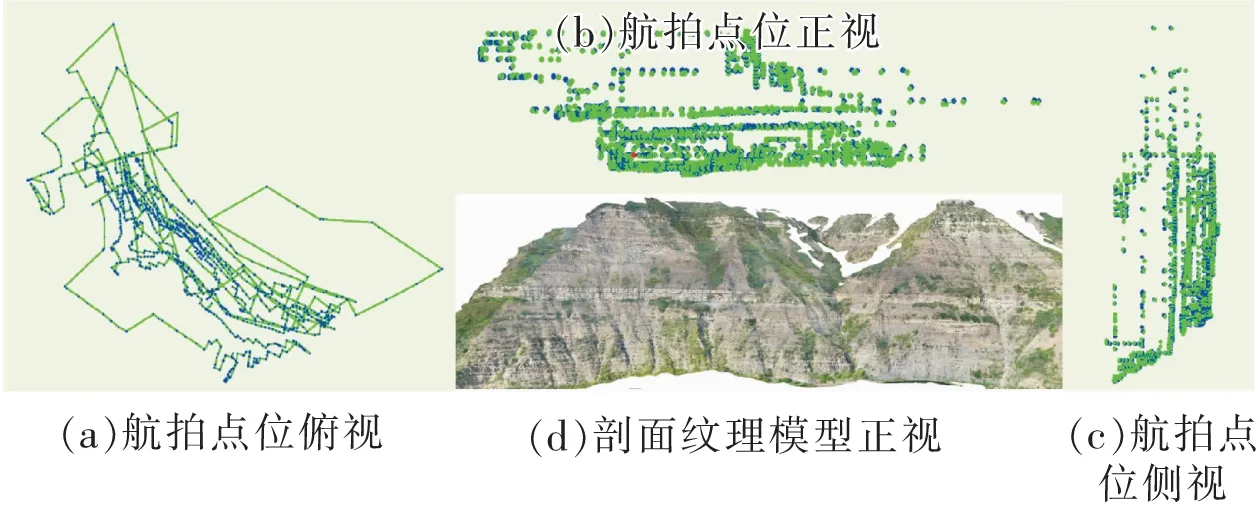
图7 竹园村剖面航拍点位空间特征Fig.7 Spatial characteristics of aerial photography points in Zhuyuancun section
4 讨 论
建模软件能够快捷准确的建立三维地质露头模型。目前常用的Pix4D和Reality Capture 2款建模软件都是集专业精度、自动校准、快速、界面友好为一体的专业建模软件,输出OBJ文件即可随时在3D模型查看器中查看。
三道沟露头数据采集482张,通过同一组数据在两软件中的建模分析发现,Pix4D生成点云数据模型点云量密集,形态轮廓清晰(图8(a)),Reality Capture模型中点云分散,清晰度有限(图8(b))。在相同数据下,Pix4D中的模型清晰度更高,反映更多细节。图8(a)模型空洞面积明显多于图8(b),相应的Pix4D相较于Reality Capture需要更高的图片重叠度才能呈现完整的模型。
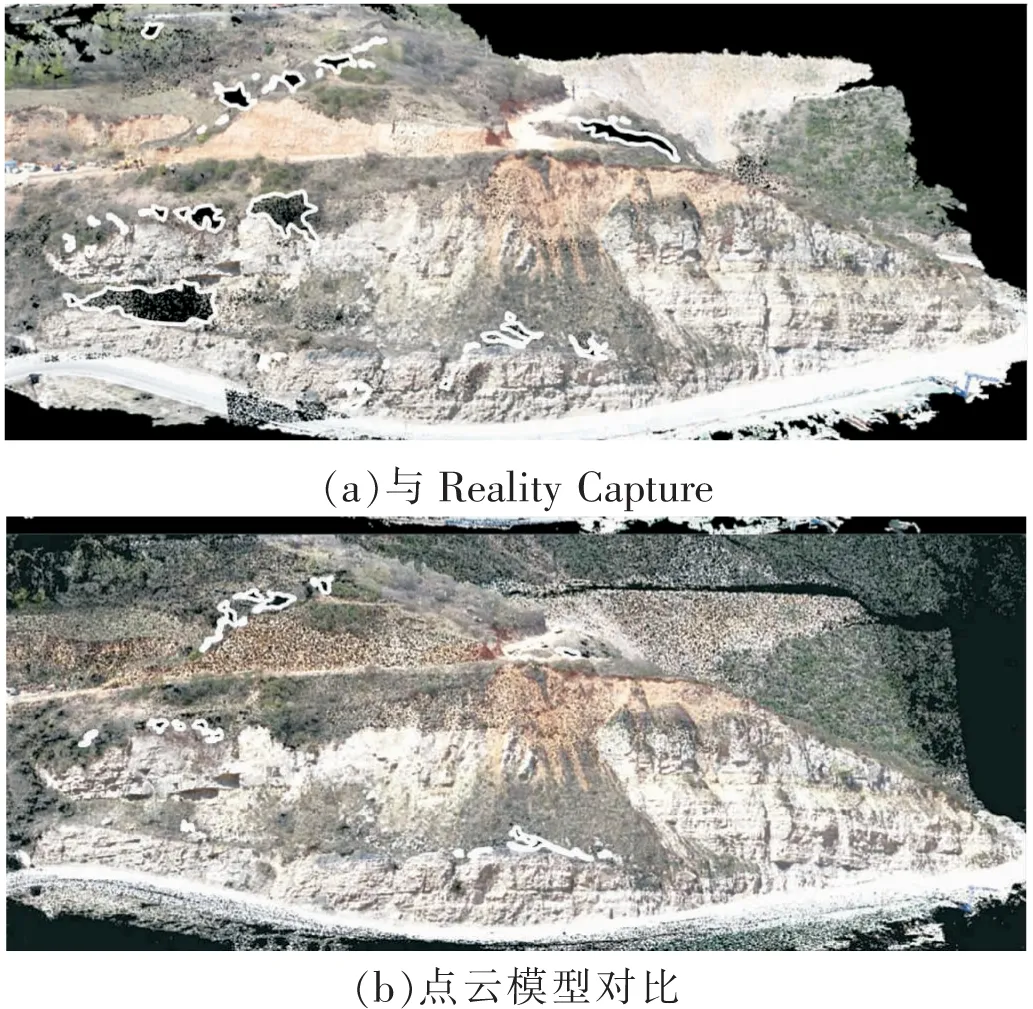
图8 平凉三道沟剖面点云模型对比Fig.8 Comparison of point cloud models at Sandaogou section in Pingliang
Pix4D和Reality Capture作为2款业内常用软件,在数据要求、点云数据、网格纹理数据、图片输出和视频输出等方面存在显著不同(表2)。因此在实际应用中选择相应的软件满足不同建模需求。
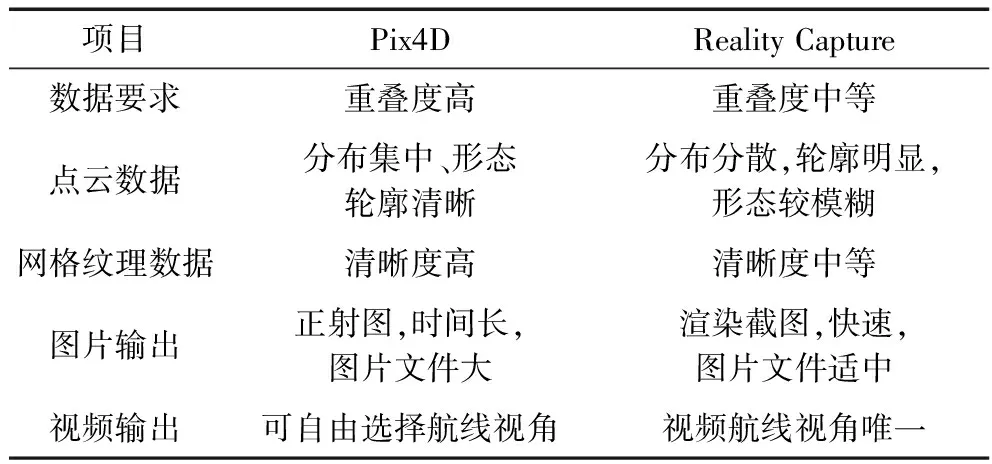
表2 Pix4D与Reality Capture软件对比Table 2 Comparison between Pix4D and Reality Capture
综合2款软件的各自情况(表2)发现,对于地层序列、不整合面、沉积结构(如河道或砂坝)、斜坡地貌、交错层理、厚度变化、裂缝方向和间距等精细定量研究有更高要求的情况下,Pix4D能够很好的呈现地质细节,加载高程或海拔信息,进行长度、平面面积以及体积的精细测量。对于模型测量的需求有限,在着重强调露头地貌特征或地质构造几何图形的连续空间观测的情况下,Reality Capture基本完成建模任务。
5 结 论
1)根据露头的几何形态选择相应的数据采集航线能够有效提高高分辨率的数字露头模型构建成功率。
2)野外地质露头常见几何形态主要分为平面/准平面、曲面和三维组合面3大类,分别对应排线直拍、环飞定点环拍结合排线直拍、不同纵深环飞定点环拍结合排线直拍3种航线规划方式,进而实现完整清晰的数据采集,通过对数据采集环节的精密规划,降低了模型对软件的依赖程度。
3)Pix4D与Reality Capture各自优势突出,根据具体建模目的和要求选择相应软件,提高模型构建效率。
4)高分辨率数字露头模型在支撑露头的精细解剖和数据永久保存的同时,为重现的虚拟实测(厚度、层/面理和线理等)及定量统计奠定可靠的数据基础。
