基于STM32单片机的微型智能消防车的设计
2021-12-18王晓鹏丁学文王敏军段扬扬李宝盛彭志辉
王晓鹏 丁学文 王敏军 段扬扬 李宝盛 彭志辉
摘要:在复杂的消防场景下,如充满有毒物质、易燃易爆物质等的火灾现场,要提高救援效率、有效保证消防人员生命安全和人民的财产安全无疑是一个很大的挑战。针对此类问题设计了一款微型智能无人消防车。该智能消防车采用STM32单片机作为控制核心,融合了图像处理技术、多传感器融合技术和无线通信技术,可实现火焰识别、自动消防、有害气体和可燃气体检测、实时控制和监控,具有很好的适用性和可执行性。
关键词:STM32;智能消防;环境检测;远程监控
中图分类号:TP391.4文献标志码:A文章编号:1008-1739(2021)20-62-4

0引言
近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。智能微型无人消防车是无人员投入火灾现场必备的终端设备,是一种代替人员进入火灾现场灭火的设备。随着我国经济的快速发展,生产性车间、厂房越来越多,其发生火灾时的情况复杂,灭火工作的危险性越来越高。一些工厂发生火灾时,容易产生有毒有害气体,有的甚至存有易燃易爆物质,对救援工作的展开提出不小的挑战,在这样危险的环境中难以保证消防人员和遇难人员的生命安全。
在此背景下,进行用于灭火抢险的微型智能消防车的创新设计是必要的,旨在尽量减少消防员进入火场的次数,并提高火场救援效率,因此进行了基于图像处理技术、无线通信技术的微型智能消防车的系统设计。
1系统总体构成及设计
智能消防车采用STM32F405RGT6单片机作为微控制器、英飞凌公司的BTN7971B作为电机的驱动芯片,这2款芯片性能可靠,可以有效保证智能消防车的稳定运行。火焰传感器和图像处理技术相结合控制智能消防车消防动作的执行。智能消防车应用了多传感器融合技术,使得智能消防车具备了环境检测能力。通过开发嵌入式系统快速识别火焰并准确控制消防水泵,实现消防车的高度智能化和自动化。其系统组成框图如图1所示。

2硬件电路设计
硬件模块主要包括STM32F405RGT6主控、电机驱动电路、控制信号处理电路、图像信号处理电路、消防动作机构、环境检测机构及电源管理电路等。
2.1电机驱动部分
电机驱动电路主要由4片BTN7971驱动芯片、缓冲芯片、直流电机、正交编码器等组成。2片BTN7971驱动芯片可构成H桥,满足电机对转速和转向调整的需求。缓冲芯片用于保护主控电路。正交编码器用于获取电机转速信息。电机驱动部分框图如图2所示。

2.2控制信号接收和发送部分
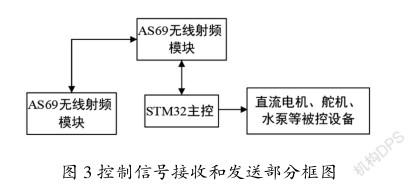
控制信号接收和发送部分主要由AS69无线射频模块等构成。该无线射频模块可实现全双工通信,消防车接收到控制信号之后,由主控芯片根据接收到的控制信号输出PWM控制信号和其他控制信号控制智能消防车的动作状态等。控制信号接收和发送部分框图如图3所示。
2.3图像处理部分
图像处理部分主要由图像获取、图像处理及图像传输等部分组成。图像处理部分通过OSD模块将OPENMV模块和主控需要发送的内容进行图像叠加后传输给无线图传发送模块,通过控制端的液晶显示器进行显示。图像处理部分框图如图4所示。

2.4消防机构部分
消防动作部分由回流水泵、喷水枪以及二轴云台等构成。其中水泵和喷水枪提供消防时所需的消防液,二轴云台的动作由PWM信号进行控制,保证水泵的动作和摄像头的视线不存在盲区。水泵的工作由NMOS管进行驱动,根据工作需求可通过PWM信号来控制水泵输出的水流大小。水泵和云台根据单片机发送的控制指令进行运作,从而完成消防动作。
2.5电源部分
电源部分由高倍率锂电池、稳压输出模块及保护电路等组成。为使车辆工作稳定,稳压输出部分将外设供电与主控供电分离。主控采用AMS1117稳压进行供电,外设则采用XL4005稳压进行供电,XL4005可输出5 A电流,且输出电压连续可调。保护电路由NMOS管构成防反接和过压保护电路。电源部分框图如图5所示。

2.6檢测部分
检测部分由车身自检部分和环境检测部分构成,其中车身自检部由分电量检测、温度检测等部分组成。环境检测部分由MQ气体传感器及温湿度传感器等组成,用于实现环境中有害气体及易燃易爆气体等检测,使用单片机的ADC外设采集传感器输出信号,完成传感器数据的采集。
3软件设计
软件开发环境是KEIL5 MDK和OPENMV软件,用C语言和python语言进行程序的编写,通过ST-LINK工具进行软件功能调试。此智能消防车主要由无线通信机构、消防动作机构和环境监测机构3个部分协作完成消防任务。无线通信系统负责传输控制信号、图像数据和传感器环境采集信息。通过将摄像头采集到的图像信息进行二值化滤波运算、火焰特征提取等处理进行火焰识别,获取火焰位置后,由STM32单片机控制消防机构动作从而消灭火焰。智能消防车程序流程如图6所示,控制端程序流程如图7所示。

3.1图像处理技术
本设计的图像处理主要有图像的传输、图像文字的叠加(OSD)及火焰的识别等。
图像传输选用PANDARC VT58系列图传进行图像信号传输,具有输出功率稳定、传输距离远、电源滤波强等特点,能保证图像数据的稳定图传。图像文字叠加采用max7465芯片,stm32f103c8t6单片机作为控制芯片,将要显示的文字信息做图像文字叠加处理后通过图传模进行数据的传输。
火焰识别主要是对火焰的颜色特征、运动特征、几何特征做处理,以实现火焰的识别。其中颜色特征主要针对火焰像素点的颜色,主要分布在橙黄色到白色之间,设置合适的RGB颜色阈值后将图像做二值化处理,获取到火焰的大致色域后根据火焰的面积变化率(受气流、燃料等影响火焰的面积发生改变)、轮廓粗糙度(物体轮廓的周长与其凸壳周长之比)、相关性(前后两帧画面的相关性)等特征提取与组合达到火焰识别的目的。
3.2 PID自动控制算法
PID自动控制主要分为位置式PID和增量式PID,可很好地应用于小车的调速,本设计采用增量式算法构建闭环控制系统。通过将控制端所要求的速度与当前速度进行比较,然后分别将它们的误差输入给比例环和积分环,将二者的输出结果进行累加,得到最后的PWM信号输出,并传输给控制对象。PID自动控制算法流程如图8所示。

4微型智能消防车的应用
在充满汽油的加油站和有毒气体的化工厂等消防人员无法深入的火灾场景,微型智能消防车便有了用武之地。微型智能消防车基于远程控制和视频通信的设计,使得消防人员可以在数千米之外的位置远程遥控消防车完成消防作业,避免了火灾对消防人员生命安全的威胁。微型智能消防车具备自动消防能力,更重要的是微型智能消防车能够采集并反馈火灾现场温度、有毒气体含量等数据,可以为后续消防救援方案的选择,提供重要的数据支持。
5结束语
基于STM32的智能消防车将控制与反馈相结合,构成了一个可靠的闭环控制系统,在提高消防救援效率的同时可有效保护消防人员的生命安全,具有很强的实用价值。如今智能算法、环境感知传感器等技术飞速发展,其中不乏可应用于智能消防领域的技术,希望越来越多的智能消防设备被研制和应用,在民众历经灾难时为他们的生命财产安全做出更有力的保障。
参考文献
[1]李明璐,尹艺玲.智能消防车的发展研究现状[J].装备制造技术,2019(6):225-228.
[2]嚴峻.灭火零伤亡:从概念到行动———全国首辆智能遥控消防车在沈阳问世[J].上海消防, 2002(12):53.
[3]钱铖,蒋静法,李斌.消防机器人的现状与发展方向[J].消防技术与产品信息, 2018, 31(12):82-84.
[4]姜树海,张楠.六足仿生森林消防机器人机构设计与分析[J].机械设计与制造,2015(12):208-212.
[5]赵伟,赵晓侠.模糊PID消防机器人无刷直流电机驱动系统设计[J].软件导刊,2019,18(1):22-27.
[6]邓宗全.地下商场灭火机器人的设计研究[J].机器人技术与应用,2003(3):38-45.
[7]谭勇.消防机器人视觉感知技术研究综述[J].绵阳师范学院学报,2018,37(2):40-45.
[8]李颖,李祥林,马宏锋.基于ARM消防机器人的设计与实现[J].兰州工业高等专科学校学报,2012,19(1):1-5.
[9]廖斌,李明,枫陆,等.循迹灭火小车实验项目开发与实践[J].科技视界,2020(31):73-74.
