基于PLC的AGV小车控制系统设计
2021-12-18胡子慧


摘要:该文围绕无人搬运小车、以工程项目为背景,采用了模块化的设计思路对基于西门子PLC控制器的AGV小车开展了控制系统设计。控制主要由PLC总控制,操作人员通过遥控器、状态面板、触摸屏来进行AGV车的操作。AGV车驱动电机的运动通过PLC进行控制,导航方式以磁导航为主,同时有激光导航可以切换。
关键词:AGV小车;PLC;模块化设计;多传感器
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2021)31-0146-02
AGV小车(Automated Guided Vehicle,简称AGV),是一种无人驾驶自动化搬运车辆[1-2]。AGV小车是多种技术融合的体现,具备自动导航能力、安全保护能力和移载功能等功能,涉及传感器技术、控制技术、导航技术、机电一体化技术等领域。AGV的出现帮助实现工厂搬运自动化,是自动仓储物流重要组成部分。
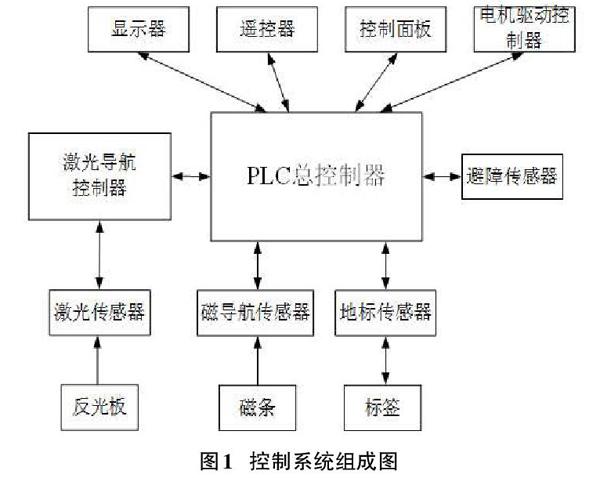
1 控制系统总控逻辑
系统采用PLC为主控单元[3],将各种传感器的输入信号接入到PLC中,对系统进行逻辑控制[4];PLC与电机控制器通讯,实现AGV车运动;PLC接收自主导航设备信号,控制车按规定路径运动;遥控器可实现系统的手动操作、停止等功能[5]。控制系统的组成如图1所示。
本文设计的AGV车主要采用差速控制实现纠偏,具体实现是通过控制两个驱动轮的速度,速度差与转弯成比例,调整两轮速度差就可以实现巡线纠偏。磁导航传感器包含多个磁导航信号,根据磁信号判断当前行驶路径磁信号强弱,从而判断是否偏离预定路线。当控制器判断当前AGV的位置在预定路径时,驱动单元按原方向继续行驶;当控制器判断AGV的位置与预定路径有所偏差时,便会把偏差信息通过计算,反向推导纠偏所需速度差,根据速度差把当前所需两轮速度参数发送给伺服驱动器,驱动器驱动伺服电机,两轮按指定速度差速纠偏,确保AGV按照预定磁带路径行驶。
总控通过PLC梯形图程序实现,通过合理的编程,可以实现AGV车全向移动系统的手、自动控制,具体设计思路如图2所示。
2 控制系统通讯方式设计
(1)PLC和显示屏间的通讯方式的选择:PLC与触摸屏间的通讯方式根据不同型号的触摸屏接口不同而不一样,西门子触摸屏Tp700 Comfort带有两个工业以太网接口,与PLC之间采用profinet接口通讯。
(2)按钮盒与PLC通讯方式的选择:由于按钮盒与PLC的数据的交换量很小,选用最常用也是最可靠的方式,通用硬接线。
(3)遥控器与PLC通讯方式的选择:遥控器与PLC之间可以采用RS232、RS485、数字量、CAN总线等方式通讯。一个遥控器只有一个通信接口,只支持一种通讯方式。遥控器输出中含有模拟量,直接I/O通讯不再适用。本项目拟采用RS232的通讯.
(4)伺服驅动器与PLC通讯方式的选择:PLC与行走电机驱动控制器可采用RS232、RS485、CANopen等其中一种通讯。
(5)激光导航系统、磁导航传感器、地标传感器与PLC通讯方式的选择:激光导航系统与PLC的通讯方式拟采用RS485、RS323串口和普通I/O通信等。
3 状态面板设计
为现场操作的方便性,将在AGV车上安装一个状态面板按钮盒,用于控制AGV车的启停,手自动模式的切换。
4 人机交互界面设计
人机界面是人机交互的重要渠道,本系统的人机界面具有以下功能:
触摸屏开机,或一段时间未操作状态时,默认显示主画面,主画面包含菜单栏和一些状态信息。磁导航有16个磁信号,在主画面用上下16个小泡表示两个磁导航感应的磁信号位置及数量;电池电压栏标示当前电池电压,导航方式显示当前AGV使用何种导航寻迹。同时点击主画面后,将会进入操作界面项目栏,在此菜单选项中,包含了此系统所有的控制选项:手控操作、参数配置、航线编程、状态显示、触摸屏设置。可以进入任意一个子画面进行相关设置。
5 特殊情形处理
在工业自控系统中,系统的安全可靠使用是放在第一位的。在安全可靠前提下,考虑现场的使用,后期维护的简单和方便。根据现场的配置情况以及以往在AGV车定检积累的经验,设计在车上红外避障传感器、限位传感器等传感器。安全防护系统控制主要由PLC控制,操作人员通过遥控器、状态面板、触摸屏来进行操作,PLC通过接收安全防护传感器的信号通过安全逻辑互锁实现车的安全防护控制。通过人机界面或遥控器来实现急停、报警等设置。
6 结论
本文针对无人搬运小车系统设计进行论述,其控制系统采用西门子PLC控制器,采用CANopen通信方式,控制驱动电机和升降电机。此外,AGV导航和安全防护也由PLC完成,PLC与磁导航传感器可采用RS485通信,本车还具有前方障碍物检测与停车报警功能。通过显示屏显示小车运行速度和状态。此系统能够较好实现无人搬运小车的自主导航、升降、搬运、避障等功能。
参考文献:
[1] 沈正,粱鉴如,杨明来,等.基于S7-200 SMART PLC的重载AGV控制系统设计[J].传感器与微系统,2021,40(8):100-103.
[2] 于佳乔.AGV系统路径规划与任务调度研究[D].长春:长春工业大学,2021.
[3] 吴世杰.基于PLC的双驱AGV系统设计与实现[J].南方农机,2020,51(2):143-145,148.
[4] 袁良伟,李仁玉,朱余浩,等.基于无人搬运小车的无线Mesh漫游测试自动化设计与实现[J].电子测试,2019(21):102-103.
[5] 呼玉东,文啸,张楚,等.基于S7-1200 PLC的AGV控制系统的设计与实现[J].机床与液压,2018,46(5):16-20,63.
【通联编辑:代影】
收稿日期:2021-03-20
作者简介:胡子慧(1991—),女,江西景德镇人,教师,硕士研究生,中级职称。
