空调压缩机负载模拟系统控制方法
2021-12-15高孝君陶海莉刘全龙
高孝君 陶海莉 刘全龙
(1.广州鸿威技术有限公司 广州 510000; 2. 广东美的暖通设备有限公司 佛山 528000;3.西安翔腾微电子科技有限公司 西安 710000)
引言
现有空调压缩机负载模拟系统主要分为机械、液压、磁粉制动和电动几大类[1],其中电动负载模拟系统是主要发展趋势。文献[2]针对现有潜艇动力系统在运行过程中承担的负载,设计了直流电机负载模拟系统。文献[3]介绍了电力测功机的发展现状、工作原理,并通过直接转矩控制方法,提升负载模拟系统的动态性能。文献[4]介绍了基于负载模拟系统逆模型的直接转矩控制算法,指出了逆模型中包含转速微分项,会引起噪声干扰。提出了解决方法:一种是增加滤波模块来滤除噪声,这将改变系统数学模型,带来延时,系统动态性能差;另一种方法是,通过传感器装置检测转矩值,不用使用负载系统的逆动力学模型。缺点是系统的频道宽带受限于传感器的频道宽度,虽然可以通过增加传感器的精度和频带宽度,但是增加额外的成本。文献[5]研究了一种由传统滞环直接转矩控制的负载模拟系统,但仅仅只做了相关理论研究和仿真模型的搭建,并没有结合理论分析验证实验效果和该方法的可实施性。
本文选用永磁同步电机及驱动作为空调机组负载的模拟装置,用以对空调机组性能测试,提高其性能和可靠性。本文提出了一种基于混合型磁链观测模型的SVPWM直接转矩控制方法,该方法使用PWM占空比与直流母线电压的比值进行计算,重构出永磁同步电机的三相电压,使用永磁同步电机的电压型磁链模型和电流型磁链模型相,提出了混合磁链模型。此控制算法不需要电压采样电路,在全速范围能均能提高系统动态响应性能,因此节省了硬件成本。综合上述算法,进行相关系统参数设计、软件仿真实验以及系统平台搭建。
1 空调压缩机负载模拟系统SVPWM直接转矩控制原理
SVPWM直接转矩控制,在一个周期内可以合成不同矢量,并实时调整磁链的方向和幅值大小,使得定子磁链幅值恒等与系统的设定值,从而保证磁链的轨迹近似圆形。通过精确计算转矩角的变化量,迭代到坐标变换中,使得目标转矩控制精度更高,脉动更小[6]。空调压缩机负载模拟系统控制框图如图1所示。

图1 空调压缩机负载模拟系统控制框图
2 磁链观测器
空调压缩机负载模拟系统SVPWM直接转矩控制算法中,把转矩和磁链幅值设定为控制目标。但是,在工程实践中,直接测量磁链值的传感器安装十分困难且价格昂贵,因此设计可以精确估算磁链的观测器显得十分重要。
2.1 电流型磁链观测器原理
定子磁链和电流在dq坐标系上的数学关系表达式如下所示:

式中:
Lsd、Lsq—电机的定子在d轴和q轴电感分量;
ψsd、ψsq—电机的定子在d轴和q轴的磁链分量;
ψf—转子的磁链值;
isd、isq—电机的定子在d轴和q轴的电流分量。
电流型磁链观测器简化模型如图2所示。
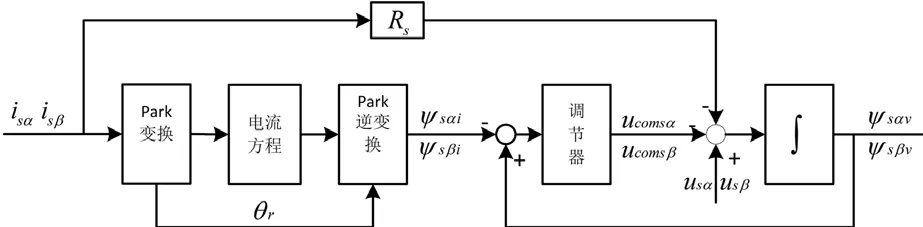
图2 电流型磁链观测器模型图
电流型数学模型中引入了定子电感量,随着电机转速变大,定子电感逐渐饱和,导致电感值变小,此时观测器输出误差较大,从而系统控制性能下降。由以上分析可知, 电流型磁链观测观测器只适合低速、中速工况。
2.2 电压型磁链观测器原理
定子磁链在坐标系中的数学表达如下所示:

式中:
isα、isβ—电机的定子在轴和轴电流分量;
ψsα、ψsβ—电机的定子在轴和轴磁链分量;
usα、usβ—电机的定子在轴和轴的电压分量;
Rs—电机内阻值。
电压型磁链观测器的控制框图如图3所示。
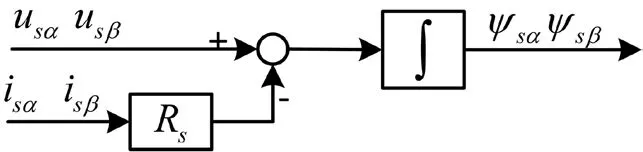
图3 电压型磁链观测器原理图
电压型数学模型中虽然包括电机的定子内阻,但是在电机运行速度较高时,其控制输出端电压值较大,定子内阻压降占比小,相对于端电压可以忽略内阻压降。电机在低速工况时,定子端电压较低,因此定子电阻产生的压降占较大,将直接影响磁链观测器精确度[7]。电流采样会带入直流偏置量,无法对电压磁链估算器作积分运算,为了避免直流偏置带来的影响,本文采用前向差分离散的低通滤波器来代替积分算子[8]。如式(3)所示。

式中:
ψs—电机定子的磁链值;
is—电机定子的电流值;
wc—低通滤波器的带宽;
us—电机定子电压用表示。
电压型磁链观测器使用低通滤波器取代积分环节,导致幅值衰减为初始值的倍,而相角产生(ω1表示电机运行角频率)角度延迟,低通滤波器所导致的幅值和相位的误差,随着电机运行转速的增大而逐渐增大。
2.3 新型混合磁链观测器控制方法
通过上文分析可知,在低速工况下,电流型磁链观测更精确,而在高、中速工况下,电压型磁链观测更精确,因此设计一款结合电流型和电压型模型的新型混合磁链观测器,在电机全频段均能准确计算磁链,提高转矩控制精度[9]。
新型混合磁链观测器数学模型如下所示:

式中:
ucomsα、ucomsβ—偏差电压;
下标v—电压型磁链数学模型;
ψsαv、ψsβv—磁链在αβ轴的分量。
通过PI调节器设计偏差电压,将电流型与电压型磁链误差量作为调节器的输入。通过合理设计调节器的控制量,保证控制模型跟踪转速变化而平滑切换,从而确保磁链估算精确度。

式中:
下标i—电流型磁链数学模型;
ψsαi、ψsβi—电机定子磁链在αβ轴的磁链分量。
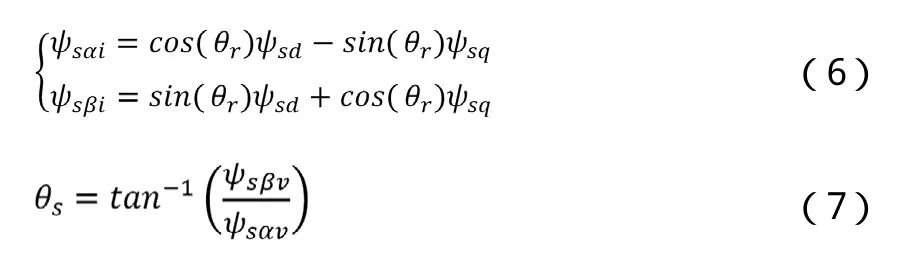
isα、isβ经过 Park变换后得到 dq轴 isd、isq,通过工式(6)计算得到ψsd、ψsq。最后反Park变换后,得到磁链估算值 ψsαi、ψsβi。
新型混合型磁链观测器控制框图如图4所示。

图4 新型混合型磁链观测器
调节模块运用PI控制器,如下所示其参数整定原则。
控制系统闭环传递函数如下

由式(8)和式(9)可知:

化简上式可得:
设:
式中:
ψsv0—磁链初值;
Gu(s)、Gi(s)—闭环传递函数。
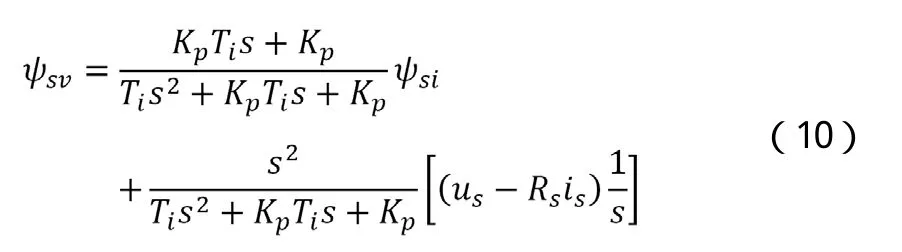
新型混合磁链观测器可以由输入变量(ψsi、ψsv0)和输出变量(ψsv)表示。进一步化简公式(10):

Gu(s)相当于二阶高通滤波器,Gi(s)相当于二阶低通滤波器,根据系统设计所需的幅频特性和相频特性来选择合适的Kp、Ki数。其参数整定原则:在低速工况下,选择电流型观测器估算磁链值;在中、低速工况下,选择电压型观测器估算磁链值。
当Gus和Gis幅值相等时,求解此时转折点的角频率ωx可得:
确保电流型与电压型观测器之间能平滑过渡,将调节器配置成二阶巴特沃斯型,具体配置参数如下:

仿真参数选取,切换转折点的频率ωx=10π(rad/s),即频率fx=5 Hz,通过公式(13)、(14)计算得到Kp=30.5、Ki=233,通过Matlab软件绘制Gu(jωx)与Gi(jωx)的幅值和相角Bode图,分析图5可得,在ωx=31.4(rad/s)处幅值相等,当频率小于5 Hz,Gi(jωx)幅值没有衰减,且相位不存在超前和滞后,因此选用电流型磁链观测器估算磁链值;当频率大于5 Hz时,Gu(jωx)幅值没有衰减,且相位不存在超前和滞后,因此选用电压型磁链观测器估算磁链值,为了满足系统的稳定性设计需求,设计平滑过渡调节器完成两种磁链模型的平滑切换。
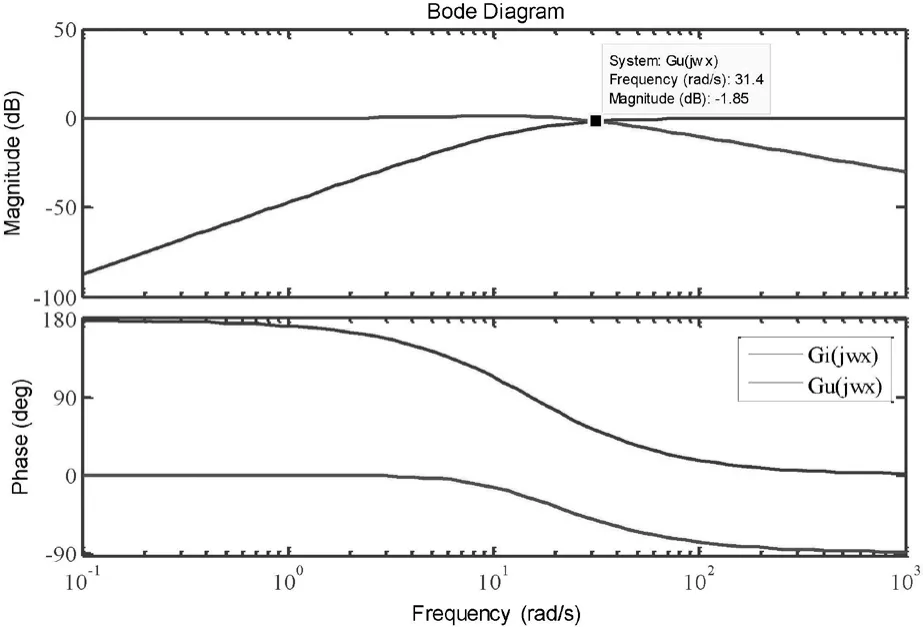
图5 新型混合磁链观测器的幅值和相角图
3 仿真分析与实验结果
综合上述所研究的新型混合磁链观测器控制算法,在Matlab/Simulink仿真平台搭建仿真模型,,首先把静止坐标系下的a,b,c三相电压电流值通过Clarke变换,变换到静止两相αβ坐标系。通过新型混合型磁链器计算后得到磁链值ψsα、ψsβ和夹角θs。
3.1 仿真结果与分析
通过仿真验证,新型混合型磁链计算磁链值的准确性,如图6所示,运行条件为,在0~0.5 s时,转速为60 r/min,0.5 s时刻,转速突增至800 r/min。

图6 磁链分量ψsα、ψsβ波形
从图6分析可知,电机运行在全速运行频率段,均能精确估算磁链值,αβ轴磁链相位相差90 °,幅值相等,与理论值相符。新型混合磁链观测器,弥补了电流型受参数变化影响较大和电压型存在直流分量问题,使得所设计的空调压缩机负载模拟系统具有较强的鲁棒性。
3.2 实验结果与分析
在测试工况台搭建了空调压缩机负载模拟系统实验平台,验证此控制方法的准确性以及可实施性。
微处理器计算的磁链值数字量,用DA电路转换成模拟量,通过示波器显示。电机在120 r/min(低速)下运行磁链波形如图7(a)所示,电机在600 r/min(高速)下运行磁链波形如图7(b)所示。由图7可知,磁链值在轴磁链相位相差90 °,正弦度好,新型混合型磁链观测器在全速范围内能精确估算磁链值。
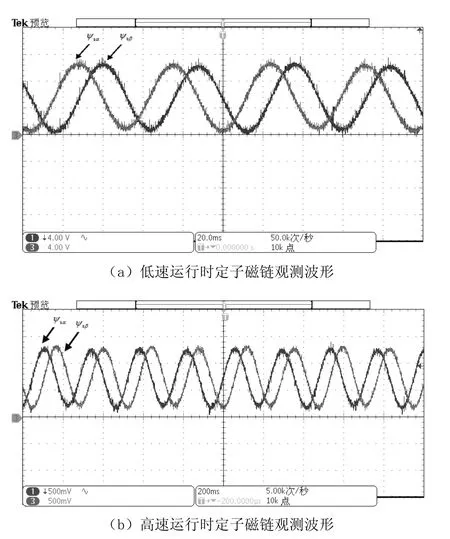
图7 定子磁链观测波形
负载电机模拟空调压缩机负载给空调机组加载用于机组性能测试,经过分析负载模拟系统给定值的力矩值与反馈值力矩值之间误差量,通过实验验证所设计的空调压缩机负载模拟系统效果显著。
1)单转子单缸压缩机转矩负载
对单转子单缸压缩机在一个机械旋转周期内的负载转矩特性进行实验测试。实验波形如图8所示。
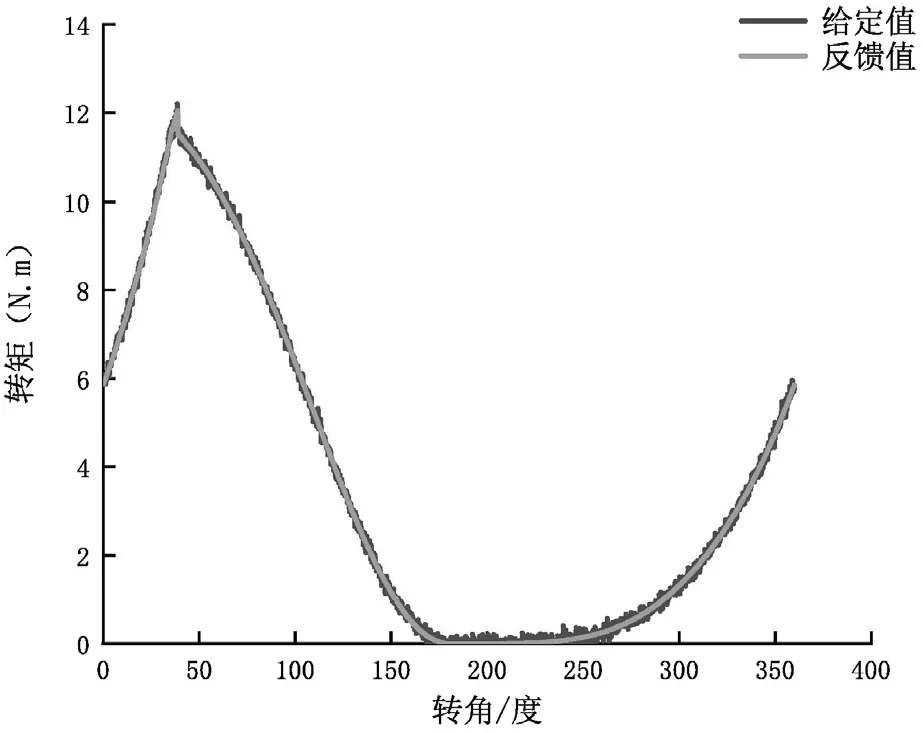
图8 单缸负载转矩响应曲线
在图8中,单转子压缩机单缸转矩负载特性曲线,从负载特性曲线中可知,本文设计的的负载模拟系统可以实现单转子压缩机单缸转矩负载的模拟,且误差较小,动态响应快,系统控制性能好。
2)单转子双缸压缩机转矩负载
对单转子双缸压缩机在一个机械旋转周期内的负载转矩特性进行实验测试。实验波形如图9所示。
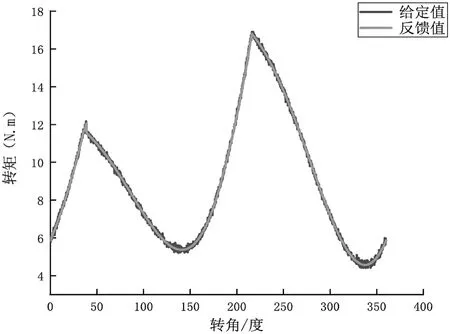
图9 双缸负载转矩响应曲线
在图9中,单转子压缩机双缸转矩负载特性曲线,从负载特性曲线中可知,本文设计的的负载模拟系统可以实现单转子压缩机双缸转矩负载的模拟,且误差较小,动态响应快,系统控制性能好。
4 结论
与传统磁链观测算法相比较,新型混合磁链观测下的直接转矩控制转矩脉动较小、系统稳定性好,且转矩响应速度快,其仿真结果符合理论分析。文中选用SVPWM直接转矩控制,更好实现了负载模拟系统转矩跟踪控制目标。
本文基于空调压缩机负载模拟系统的研究,简述了SVPWM直接转矩控制,讨论了现有磁链观测器存在的优缺点,提出新型混合磁链观测器控制方法。通过设计二阶巴特沃斯型PI调节器实现低高速平滑切换,提高系统稳定性。通过仿真与实验说明该方法能精确模拟压缩机负载,供压缩机性能测试,降低了空调机组安装人力成本,以及解决了复杂工况模拟困难的问题,且负载输出响应速度快、动态性能好。
