Fractional-Order Control of a Wind Turbine Using Manta Ray Foraging Optimization
2021-12-14HegazyRezkMohammedMazenAlhatoMohemmedAlhaiderandSoufeneBouallgue
Hegazy Rezk,Mohammed Mazen Alhato,Mohemmed Alhaider and Soufene Bouallègue,4
1College of Engineering at Wadi Addawaser,Prince Sattam Bin Abdulaziz University,Al-Kharj,11911,Saudi Arabia
2Department of Electrical Engineering,Faculty of Engineering,Minia University,61517,Minia,Egypt
3Research Laboratory in Automatic Control(LARA),National Engineering School of Tunis(ENIT),University of Tunis,Tunis,1002,Tunisia
4High Institute of Industrial Systems of Gabès,University of Gabès,Gabès,6011,Tunisia
Abstract:In this research paper,an improved strategy to enhance the performance of the DC-link voltage loop regulation in a Doubly Fed Induction Generator (DFIG) based wind energy system has been proposed.The proposed strategy used the robust Fractional-Order (FO) Proportional-Integral(PI)control technique.The FOPI control contains a non-integer order which is preferred over the integer-order control owing to its benefits.It offers extra flexibility in design and demonstrates superior outcomes such as high robustness and effectiveness.The optimal gains of the FOPI controller have been determined using a recent Manta Ray Foraging Optimization(MRFO)algorithm.During the optimization process, the FOPI controller’s parameters are assigned to be the decision variables whereas the objective function is the error racking that to be minimized.To prove the superiority of the MRFO algorithm,an empirical comparison study with the homologous particle swarm optimizationand genetic algorithmis achieved.The obtained results proved the superiority of the introduced strategy in tracking and control performances against various conditions such as voltage dips and wind speed variation.
Keywords: Renewable energy; modeling; wind turbine; doubly fed induction generator; fractional order control; manta ray foraging optimization
1 Introduction
Recently, the utilization of renewable energy sources has prompted the reduction of conventional fossil-fuel energy source dependency.Wind energy as a renewable source has gained considerable attention because it is clean and pollution-free.Wind Energy Conversion Systems(WECSs) are mainly based on Wind Turbines (WTs).However, the intensive research that is executed in the wind technology market produced various wind energy configurations.The most popular configuration is the Doubly Fed Induction Generator (DFIG) linked with the WTs [1,2].This type is vastly used due to its considerable advantages, which the decoupled control of active and reactive powers, low converters’costs, and mechanical exertion decrease are the main ones.The DFIG is linked to the grid via a converter consisting of a Rotor Side Converter (RSC) and a Grid Side Converter (GSC).This topology enables the converter to catch the portion of 20%to 30% of the overall power resulting in reducing its cost [3,4].
Several research works have assured to reinforce the efficiency of WECSs.Among the existing control strategies, the classical Vector Control (VC) is broadly applied.This scheme allows independent control of the power components exchanging between the DFIG and the grid and keeps the DC-link voltage constant.The VC method is mostly attained by regulating the decoupled rotor converter currents using linear Proportional-Integral (PI) controllers [5,6].The major disadvantage of this scheme is that the effectiveness of the DFIG relies on the accurate adjusting of the PI parameters and the exact values of DFIG parameters such as stator resistance, rotor resistance,and inductances [7].Hence, the PI controllers-based VC method provides poor performance and low robustness when actual DFIG parameters deviate from the nominal values, which have been used in the control system [8].
In this regard, to outperform the drawbacks of the classical VC method based, various control structures are proposed to improve the dynamic response [9].Therefore, the Fractional-Order (FO)PI controllers emerge as a relevant option, as demonstrated by several applications.This type of controller combines the benefits of the classical PI and fractional calculus.Therefore, this leads to better performance [10,11].Applying a FOPI controller in the pitch angle control loop and is compared with a fuzzy PI controller has been suggested in [12].In [13], the authors focused on attenuating the Total Harmonic Distortion (THD) value in the voltage and current signals using the FOPI controllers in the back-to-back converter.However, the design approach was not indicated.Besides, a simple wind speed profile with fixed step changes is investigated.Another solution adopting the FOPI scheme has been discussed for the active power control based DFIG in [14].Besides, the FOPI controllers are applied in the internal loop of rotor current instead of the classical PI controllers.Also, the tuning of the FOPI controllers is executed using the frequency domain specifications.All these studies discussed the FOPI method in the presence of the L-filter at the GSC.
In this work, the FOPI controller is designed for the DC-link voltage loop in the presence of the LCL filter.This filter leads to improve the THD of the current grids [15].Usually, the FOPI controllers have an extra adjustable parameter than the classical PI controllers.This parameter makes the controller design more complicated.Many methods are adopted for the tuning of FOPI controllers.However, most of these methods depend on the trial-errors procedure and the frequency domain specifications.However, since the FOPI controller gains rely on the mathematical representation, the control schemes become prone to error.Besides, the tuning process can be time-consuming, and the optimal gains may not be caught.To this end, the nature-inspired meta-heuristics such as Particle Swarm Optimization (PSO) and Genetic Algorithm (GA) are applied [16–18].Therefore, this work uses a Manta Ray Foraging Optimization (MRFO) algorithm to attain the FOPI controller gains’[19].The main contributions of the proposed FOPI controller are:(1) It ensures high tracking performance through the selection of the optimal gains for the FOPI controller by using the recent metaheuristic MRFO algorithm.(2) It presents a fast dynamic behavior and high robustness of the closed-loop DC-link voltage loop under external disturbances such as wind speed variation and the voltage dip conditions.(3) It reduces the values of the THD of the grid currents more than the traditional PI controller.
The remainder of this paper is organized as follows.The mathematical model of DFIG based WT is detailed in Section 2.In Section 3, the description of the FOPI controller for the DC-link voltage dynamics is analyzed.Also, such an MRFO algorithm is described and given.Section 4 states the implementation of the proposed MRFO-tuned FOPI control approach.Concluding remarks are given in Section 5.
2 Modelling of the DFIG Based Wind Energy Converter
2.1 Modelling of the Wind Turbine
The rotor blade of the WT is responsible for catching the wind power and converting it into kinetic energy.The captured mechanical power is given as follows [2,3]:

whereρis the air density,Cpis the power coefficient that depends on both the tip-speed ratioλand the blade pitch angleβ,Ris the turbine radius andVwis the wind speed.
The tip-speed ratio is defined as the ratio of the blade tip-speed to the wind speed.It is given by:

where Ωtis the angular speed of the WT.
2.2 Modelling of the DFIG
The dynamic equations of the DFIG model can be expressed as [2,3]:
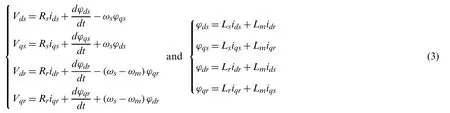
whereVsandisare the stator voltage and current,Vrandirare the rotor voltage and current,φsandφrare the stator and rotor flux linkages,RsandRrare the stator and rotor resistances,ωsandωmare the stator and rotor angular frequencies, respectively.The subscriptsdandqdenote the direct and quadrature axis components, respectively.
In this work, the Stator Flux Orientation (SFO) is adopted to implement the power control of the DFIG.Supposing that the electrical grid is stable, the stator flux is constant.Hence, according to the above presumptions, the stator voltages and fluxes can be written as follows [3]:

whereLs,Lr, andLmare the stator, rotor, and magnetizing inductances, respectively.
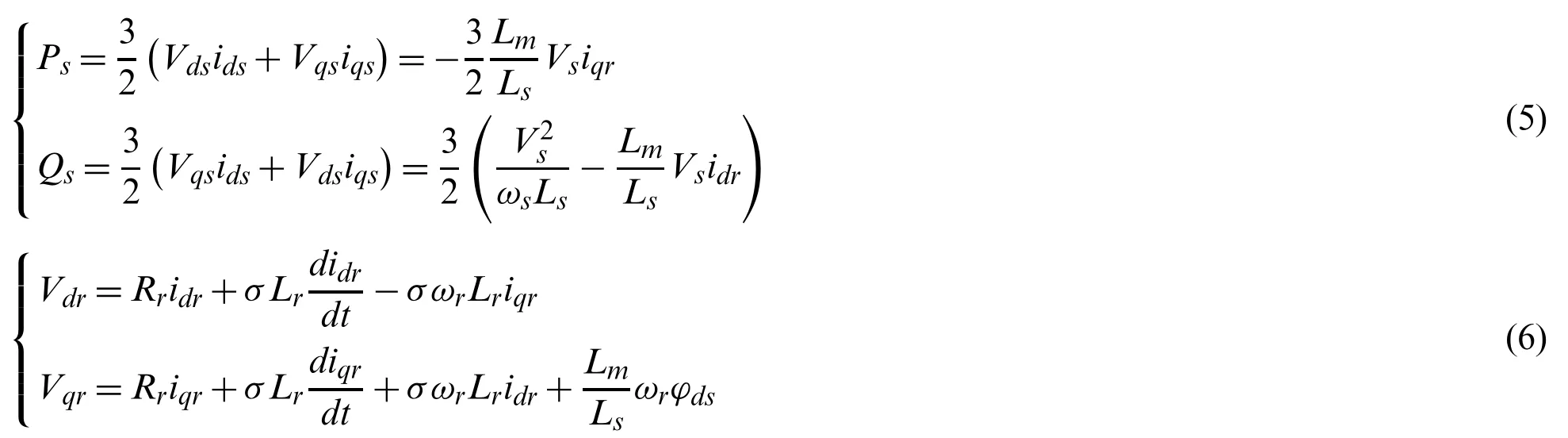
The stator power components and rotor voltages are expressed as [3,4]:
2.3 Modelling of the GSC and the DC-Link Circuits
The GSC is connected to the grid through an LCL-filter.However, for better understanding the control of the GSC, it is necessary to describe the model of the grid side system and DClink parts.The mathematical formulation of the GSC in the dq synchronous frame is defined by Eq.(7).The termLTrepresents the sum of the converterLiand grid sideLginductances.In fact,the LCL-filter can be approximated to an L-filter equal to the sum of the LCL-filter inductors [2]:

whereVdfandVqfare the terms of the power-converter side voltage,igdandigqare the terms of the grid currents,egdandegqare the terms of the grid voltage, andRTis the sum of the converter and grid side resistors.
The DC-link circuit, which connects the GSC and RSC components, can be modeled as follows [2,9]:

whereCdcis the DC-link capacitance andirdcis the current flowing between the DFIG rotor and the DC-link.From the voltage dynamics described by Eq.(8), the DC-link voltage can be regulated via the direct grid current.
3 Control Strategy and Optimization
3.1 Problem Statement
Generally, the classical vector control of the DFIG system is divided into the RSC and GSC control diagrams, which the PI controllers are usually used in this control scheme.The RSC is adopted to regulate the stator power components.On the other hand, the GSC is adopted to maintain the DC-link voltage constant.In this work, the FOPI controller is applied in the GSC circuit to improve its control performance.As a result, the excellent tracking performance, the reduced chattering, and the robustness of the DC-link under disturbances are improved.However,a good selection of the FOPI controller gains is a big challenge, where the optimal parameters improve the system performance.Control parameter tuning using the conventional manual trialsand-errors based approach is a time-consuming and non-systematic procedure.The manta ray foraging optimization is proposed to improve the selection of the FOPI regulator gains.The proposed FOPI based DC-link voltage for the DFIG control scheme is shown in Fig.1.
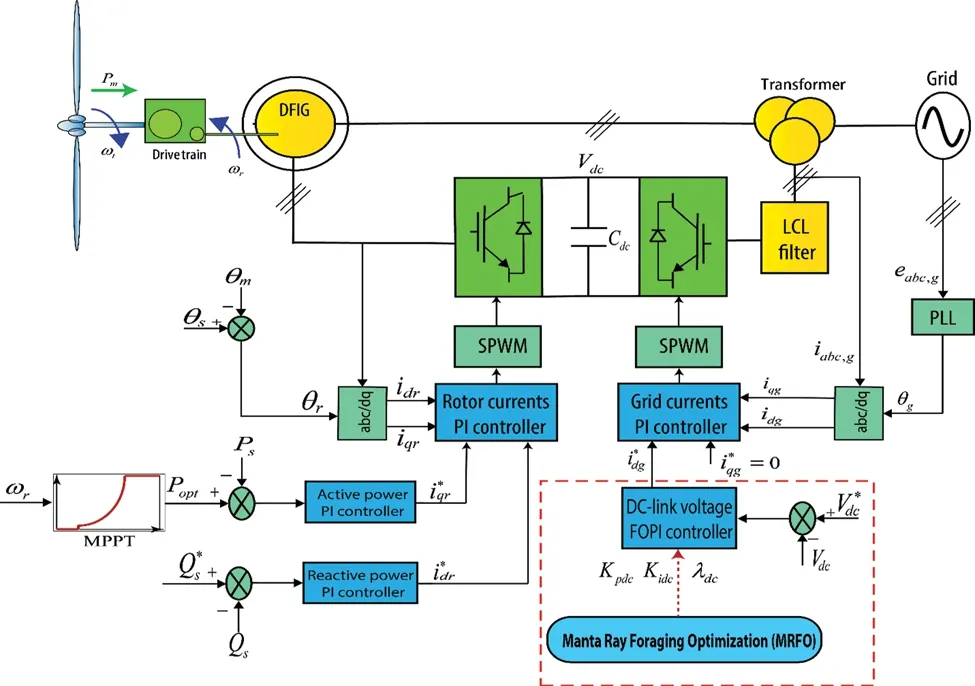
Figure 1:The proposed control approach applied to the DFIG system
3.2 Fractional-Order PI Controller
Fractional-Order (FO) controllers gained great attention and high penetration in many applications.Presently, many researchers tried to achieve the most reliable performance of such controllers [11].Fractional-Order Proportional-Integral-Derivative (FOPID) controller was firstly presented in [20].It is characterized by better performance than the conventional PID one,especially for the closed-loop control process.Five parameters are required to model the PIλDμcontrollers which are the gains of PID (Kp,Ki, andKd), the order of integrator (λ), and the order of derivative (μ).Fig.2 shows the block diagram of the PIλDμcontroller with a plant.
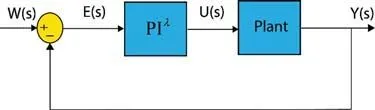
Figure 2:Block diagram of the PIλ controller with a plant
Referring to Fig.2, the transfer function of the FOPID controller can be written in the following form:

whereU(s)andE(s)are the output and input of the FOPID in thes-domain, respectively.
The output of the PIλDμcontroller in the continuous-time framework can be written as follows:

The main object of the FOPI controller is to feed the plant with the desired input via minimizing the error signal fed to it (i.e., E(s) controller’s input).This can be achieved when the parameters of the PIλcontroller are tuned in a correct manner.
The parameterλgives more flexibility to enhance the FOPI performance better than the conventional PI.However, many previous works performed the tuning process of the PIλDμcontroller, which is considered a big challenge for most researchers [21].In this work, the MRFO approach is selected to identify the optimal parameters of PIλcontroller for the DC-link voltage loop, which the tuning problem associated with the PIλcontroller, is formulated as a constrained optimization problem.
Several time-domain performance metrics, i.e., maximum overshoot, steady-state error, rise,and/or settling times can be used as operational constraints for the formulated optimization problem.Such a problem deals to minimize a set of the well-known performance criteria such as Integral Absolute Error (IAE), Integral of Square Error (ISE), and Root Square Mean Error(RSME) as follows:
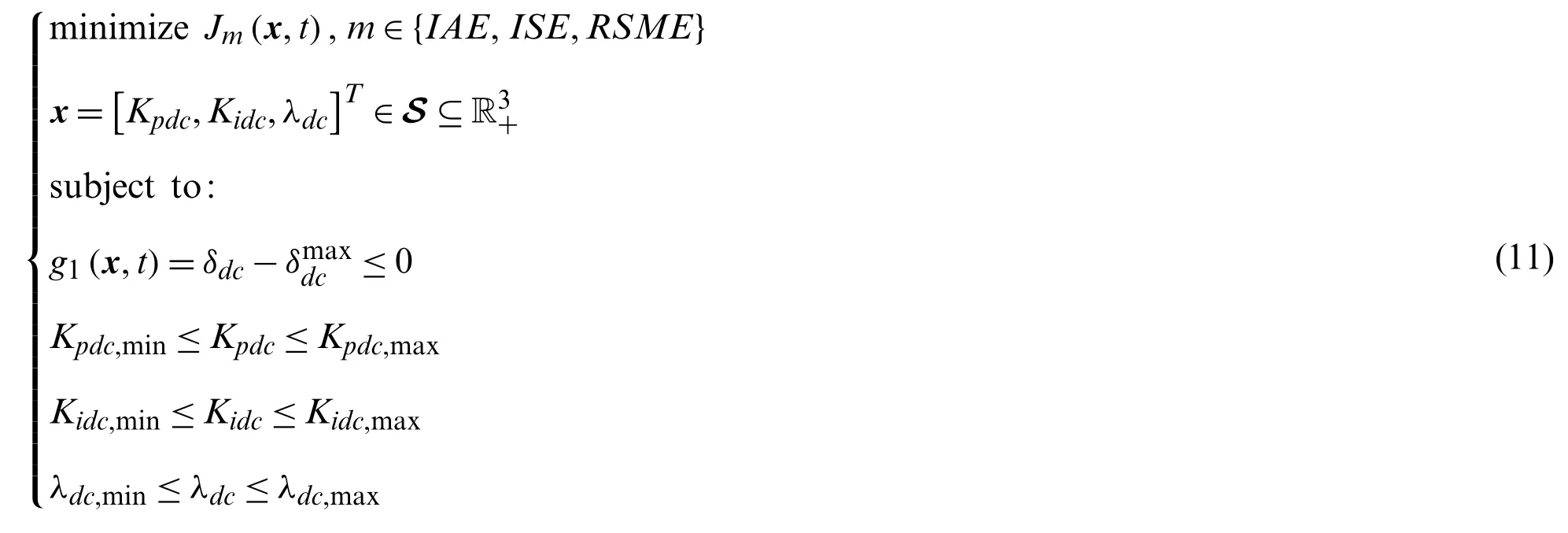
whereJm:→R are the cost functions,gq:→R are the problem’s inequality constraints,δdcandare the overshoot and specified maximum overshoot of the DC-link voltage step response, respectively.The termsKpdc,Kidc,λdcindicate the gains of the PIλcontroller for the DC-link voltage control loop.Fig.3 gives the optimization-based tuning scheme of the FOPI controller for the DC-link voltage control.
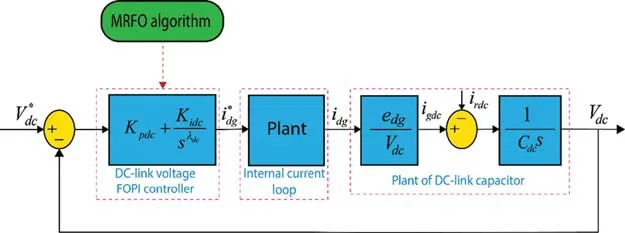
Figure 3:FOPI control scheme for the DC-link voltage based MRFO algorithm
3.3 Manta Ray Foraging Optimization
Manta rays are fancy creatures although they appear to be terrible.They are one of the largest known marine creatures.MRFO is recently suggested by Zhao et al.[19].It is inspired by three foraging behaviors including chain foraging, cyclone foraging, and somersault foraging.The mathematical models are clearly described in [19].During the chain foraging, manta rays line up head to tail and form a foraging chain.The individuals update their positions based on the following relations:

whereis the position of theith individual at time t in thedth dimension,rdenotes a random number [0 1],αis a weight coefficient anddenotes the plankton with high concentration.
When a school of manta rays recognizes a patch of plankton in deep water, they will form a long foraging chain and swim towards the food by a spiral.The following mathematical relation can be used to simulate the spiral-shaped movement of manta rays in 2-D space:

whereωis a random value.
This motion behavior can be extended to an n-D space.For simplicity, the model of cyclone foraging can be represented using the following relations:

whereβdenotes a weight coefficient,Tis the maximum number of iterations andr1is a random value [0 1].
Then, every individual search for a new position far from the current best one by assigning a new random position as following:

whereLbdandUbdare the lower and upper limits
Lastly, in the somersault foraging, the position of the food is viewed as a pivot.Each individual tends to swim to and from around the pivot and somersault to a new location.The following relation can be representing this stage:

whereSdenotes the somersault factor,S=2,r2, andr3are random values.
4 Results and Discussion
This section investigates the numerical simulations executed to assess the effectiveness of the proposed MRFO-tuned FOPI controller design approach for the studied DFIG.The demonstrative control results of the active/reactive powers and DC-link voltage are discussed and analyzed.The parameters of the used DFIG system are presented in [2].To investigate the performance of the proposed algorithm, GA and PSO algorithms are implemented, in which the number of the population size is 10, and the maximum number of iterations is 25.
Tab.1 lists the optimization results of the problem (11).It can be clearly observed that the proposed MRFO algorithm produces the best mean solutions over the three used indices in comparison with the other algorithms.Fig.4 shows the convergence history of the mean cost functions for the RMSE index.The MRFO algorithm outperforms the compared algorithms in terms of fastness and non-premature convergence.The Box-and-Whisker plots of the mean objective function values are presented in Fig.5.The results of the cost function prove the superiority of the proposed MRFO algorithm.Hence, the parameters of the FOPI controllerbased MRFO optimization algorithm are adopted.The active/reactive powers, DC-link voltage,and THD of the grid currents are displayed to prove the performance of the proposed FOPI controller.The demonstrative results of the FOPI controller are tested under the following conditions:(1) Variations in the DC-link reference.(2) Wind speed step variation.(3) Voltage dips conditions.
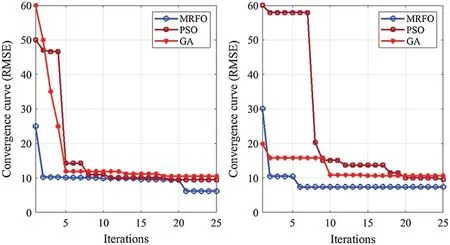
Figure 4:Convergence histories of the optimization algorithms:RMSE index
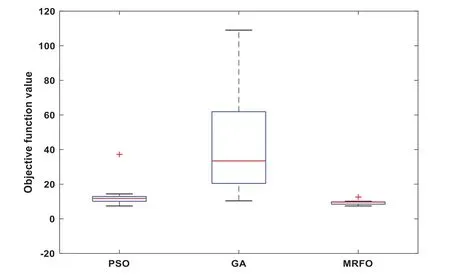
Figure 5:Box-and-Whisker plot of the optimization algorithms:RMSE index
4.1 DC-link Voltage Step Change
Fig.6 illustrates the dynamic performance of the DC-link voltage control.From Tab.2, it can be observed that the FOPI controller introduces the best time domain performances in terms of settling time, rise time, and overshoot minimization.Besides, it can be noted that the proposed controller reduces the chattering effect in comparison with the PI controller.
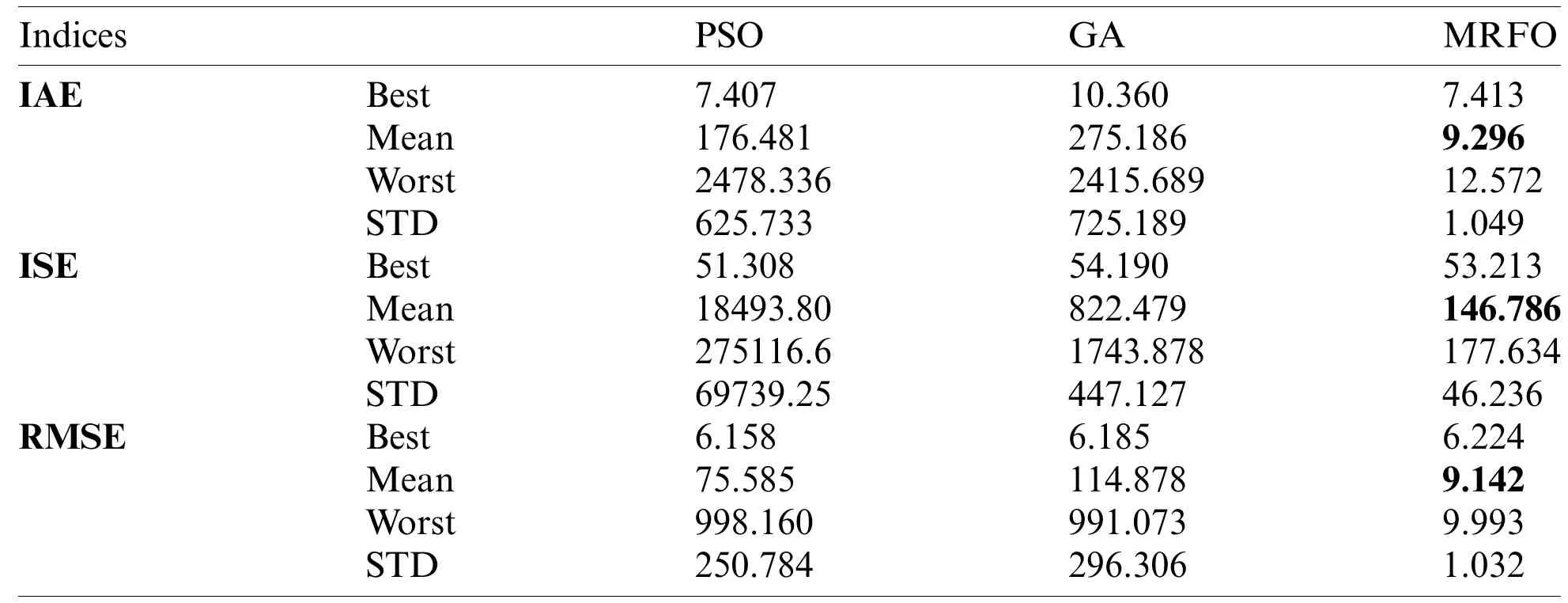
Table 1:Statistical results of optimization for the problem (11) over 30 independent runs
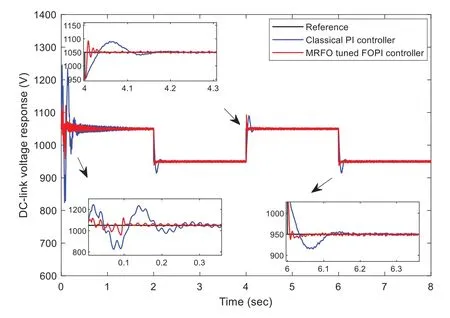
Figure 6:Performance comparison of the DC-link voltage under step changes

Table 2:Time-domain performances’comparison for the DC-link voltage dynamics
Fig.7 shows the dynamic performance of the reactive power response.It can be noted that the decoupling between the active and reactive powers is ensured.Fig.8 shows the THD of the grid currents for the two control strategies, which this result confirms that the proposed FOPI controller further attenuates the harmonics of the grid currents.
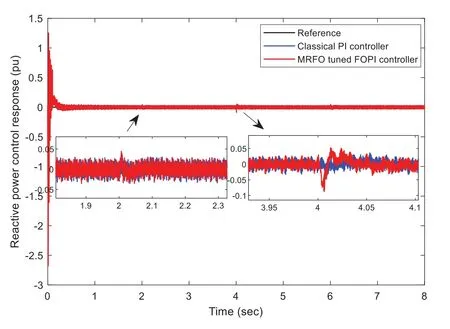
Figure 7:Performance comparison of the stator reactive power under step changes
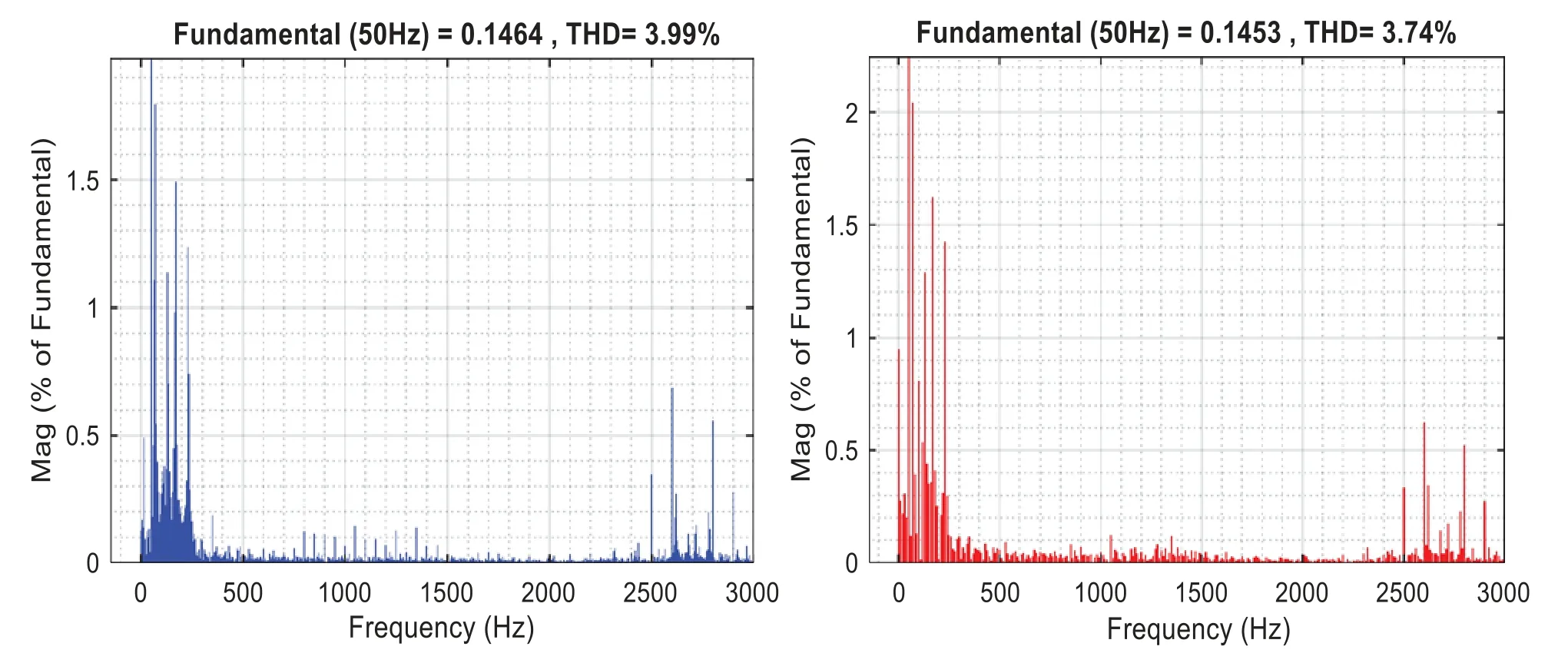
Figure 8:Grid current harmonic spectra:(a) PI controller; (b) FOPI controller
4.2 Voltage Dip Condition
To investigate the performance of the proposed controller, the MRFO-based PIλrobustness is examined under the dip voltage scenario.A 30% voltage drop is considered at the simulation times 3 and 4 s.The dynamic responses of the FOPI and PI controllers are presented in Figs.9 and 10, respectively.It can be observed that the proposed control method can successfully mitigate the voltage dip, in which the fluctuations in the DC-link and the stator reactive power during the voltage dips are relatively small.This result confirms the robustness of the proposed FOPI controller-based MRFO.
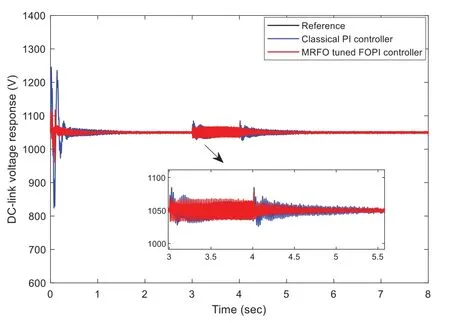
Figure 9:Performance comparison of the DC-link voltage under the voltage dip condition
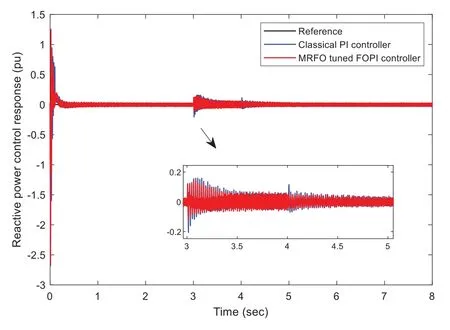
Figure 10:Performance comparison of the stator reactive power under the voltage dip condition
4.3 Wind Speed Step Variation
The step variation scenario is considered for wind speed to appraise the tracking performance of the understudy controllers.This scenario is presented in Fig.11.Besides, Figs.12 and 13 show the simulation results which confirm the efficiency of the MRFO-tuned FOPI.These MRFObased PIλclosed-loop responses can accurately track the reference values with low fluctuations compared to the classical PI one.
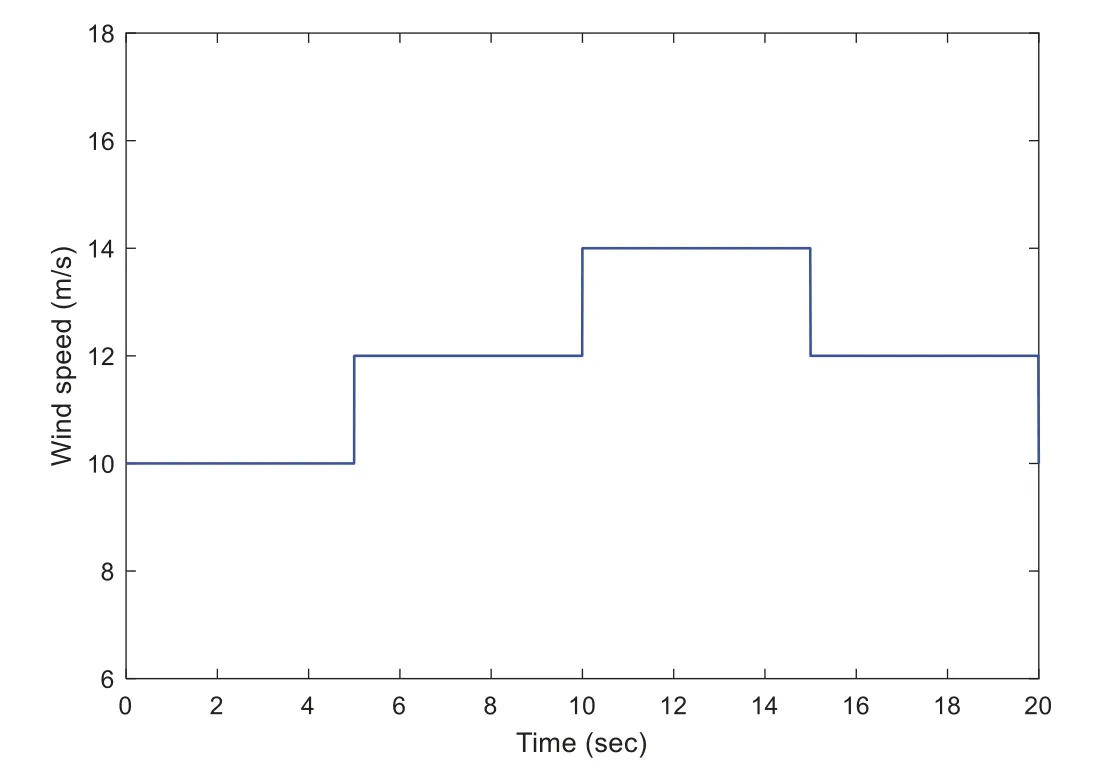
Figure 11:Wind speed step variation between 10 and 14 m/s
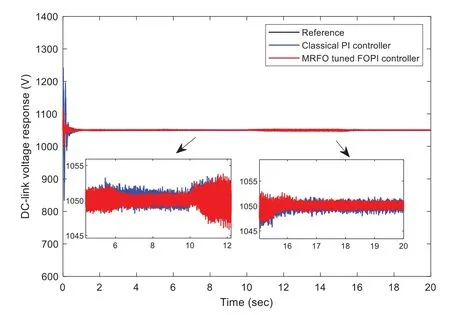
Figure 12:Performance comparison of the DC-link voltage under the wind speed step variation
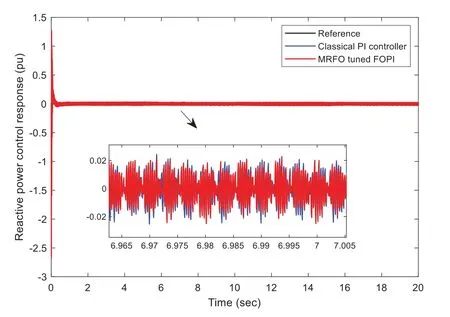
Figure 13:Performance comparison of the stator reactive power under the wind speed step variation
5 Conclusions
This research work compares the classical PI and FOPI controllers in a DFIG-based WT.The gains of the FOPI are acquired by using the MFRO meta-heuristic algorithm.The obtained results show that the FOPI controller performs better than the traditional PI in the DC-link voltage dynamics.(1) The FOPI-tuned MRFO controller needs a lower rise time and settling time,less tuning time, and better robustness with wind speed variations and voltage dip conditions.(2)The FOPI controller enhances remarkably the start-up performance and makes the system reach its steady-state region without a considerable impact.The gained results show that the proposed FOPI controller tuned-MRFO method is a promising alternative strategy for controlling the DFIG system by systematically tuning the unknown FOPI controllers’parameters efficiently.
Funding Statement:The authors received no specific funding for this study.
Conficts of Interest:The authors declare that they have no conflicts of interest to report regarding the present study.
杂志排行

Computers Materials&Continua的其它文章
- An Optimized Deep Residual Network with a Depth Concatenated Block for Handwritten Characters Classifcation
- A Machine Learning Based Algorithm to Process Partial Shading Effects in PV Arrays
- Interference Mitigation in D2D Communication Underlying Cellular Networks:Towards Green Energy
- A New BEM for Fractional Nonlinear Generalized Porothermoelastic Wave Propagation Problems
- Tamper Detection and Localization for Quranic Text Watermarking Scheme Based on Hybrid Technique
- COVID-19 and Learning Styles:GCET as Case Study