光标签使能的车路协同现状与展望
2021-12-14李伟许科诺许辰人
李伟,许科诺,许辰人
(北京大学,北京 100871)
0 引言
随着自动驾驶的潜力被逐步挖掘,单车智能局限性渐显,车路协同的重要性日益突出[1-2]。对于日常驾驶中存在诸多动态的路况,如事故、施工、积水或冰面等,单车的车载传感器(如摄像头和LiDAR)难以识别和推理。此时,若路侧的基础设施搭载了智能传感器,则可以将感知到的动态路况通知来车,补齐单车感知的不足。事实上,在道路基础设施上配备智能传感器已经成为全世界基础设施现代化进程的一部分[3]。为了将传感数据传递给车辆,通信手段至关重要。专用短程通信(DSRC)以及蜂窝车联网(C-V2X[4])是迄今为止两种被广泛认可的成熟技术。然而时至今日,由于商业模式不清晰,应用场景、政策法规不完善等原因,其大规模部署的脚步仍然缓慢。
近年来逐步兴起的光标签技术[6]为车路协同提供了另一种崭新的可能性。其通过整合低功耗电路、逆反射材料和液晶调制器的方式,将传统的交通标志进行翻新和改造,创造一种新的标志RetroSign。一方面,RetroSign 保留了标志本身的功能,即向驾驶员传递信息。光标签仅仅将传统路牌逆反射涂层的一小部分进行覆盖和改造,整体的视觉效果没有改变;另一方面,光标签也增强了标志的功能——车辆可以通过加装了读写器的车灯与道路周围的路牌进行远距离的通信。在弱光、黑夜等人类驾驶员视野受限的情况下,光标签技术可以帮助驾驶员提前了解到道路上发生的动态信息,进而留有充足的时间做出相应的处理。
光标签技术因其低成本、低速率、高方向性等特性,与C-V2X 等无线电车路协同技术优势互补,为车路协同的多样化发展提供了新的机会。本文首先介绍了光标签技术的基本原理,进而给出原型光标签系统的实验表现。之后,本文自下而上,从技术自身、基于光标签技术的单车级别应用,以及基于光标签技术的车路协同级应用等方面,对光标签技术的未来发展进行展望。
1 基于光标签的V2X通信
整个光标签系统基于可见光逆反射通信(VLBC,Visible Light Backscatter Communication),由两个部分组成。其一为读写器,被加装于汽车的车灯处,读写器负责向光标签发送问讯信号,这条链路称为下行链路,读写器所发出的照明光也可带有高频率的载波,为光标签发送回的上行链路提供信息载体。其二为光标签,被加装于路牌、道钉等带有逆反射涂层的道路基础设施上,光标签自身在逆反射材料层之前加入了液晶调制器(见图1)。不同的通电状态可以改变入射光信号的反射状态,进而改变所调制符号信息,该链路称为上行链路。上下行链路共同为汽车与基础设施间提供了双向通信。
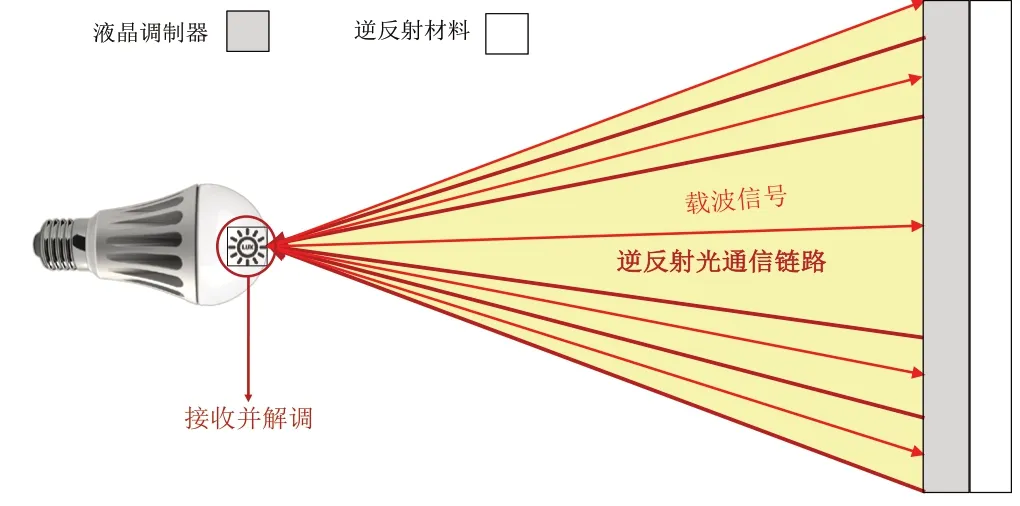
图1 光标签系统上行链路原理
光标签技术满足了下列三个要求:(1)无闪烁——避免对人类驾驶员造成干扰,因为人类的视觉系统对运动和闪烁非常敏感;(2)长通信距离——长达几十米,甚至上百米的通信距离才能给予驾驶员足够的空间和时间来及时采取行动;(3)多路访问——多个读写器和多个RetroSign 同时存在的情况下应当也能有效地通信。针对闪烁问题,受传统(有源)可见光通信的最新设计启发[7-8],我们将前偏振器从液晶光阀(LCD shutter)上分离出来,并放置到读写器上的光传感器之前。为了解决长距离通信的挑战,我们设计了一个互补光学前端,并进一步设计了一个偏振差分接收(PDR)方案。试验结果表明新设计实现了5.3 dB 的信噪比提升。针对多路访问问题,我们设计了一个适用于高速移动场景的基于请求-应答模型的数据链路协议,实验证明它可支持3 个读写器和5 个RetroSigns 的多路访问。
1.1 延迟偏振与互补光学前端设计
VLBC 通过控制LCD 的状态来通过或阻挡反射光,进而调制信息。LCD 由两层偏振器和中间的液晶层组成,如图2(a)所示,液晶在不同电压下的偏振变化特性是LCD 调制能力的关键。只要光以正确的顺序(即偏振层-液晶层-偏振层)通过这三层设备,便可正常实现LCD 光学调制。此外,人眼无法感知光的偏振。前端设计正是基于这一基本原理。
(1)延迟偏振
我们将普通LCD 中偏振器与液晶层分开,并将前偏振器移动到读写器上的光传感器的前面,如图2(b)所示。从图中我们可以看到,光传感器接收到的光信号仍然受到液晶的状态影响而通过或被阻挡。不同的是,无论液晶层的状态如何,总是有光被(反向)反射。从RetroSign 的改良LCD 中射出的反射光总是带有偏振方向,而具体的方向由液晶层的充电状态决定;不同状态下的反射光强度相同。人眼可以感知光的强度,但不能感知其偏振,因此不会察觉到闪烁。由于第二次偏振被延迟到反射光照射到读写器的光传感器上,因此被称为延迟偏振。
(2)互补光学前端设计
受到电路设计中常见的差分信号启发,我们在原有的光传感器基础上,添加了一个新的光传感器,并在两个传感器的前端覆盖具有正交偏振方向的偏振器(例如,一个传感器的前端偏振器为水平方向,而另一个的偏振器为垂直方向)。这样,成对的接收单元(如图2(b)中的Rx1 和Rx2)可以提升接收信号的能量。
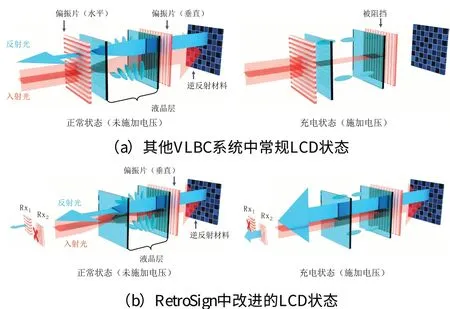
图2 RetroSign和其他VLBC方案的LCD结构和状态比较(注意前偏振器位置的不同)
(3)基于偏振的差分接收
利用延迟偏振的设计,RetroSign 可以用不同的偏振状态来调制信息。例如,“1”和“0”可被映射映射到水平和垂直偏振(通过改变施加在液晶层的电压)的出射光中。基于这种二进制偏振移键控调制方案,以及互补光学前端设计,便可设计出基于偏振的差分接收(PDR,Polarization-based Differential Reception)。
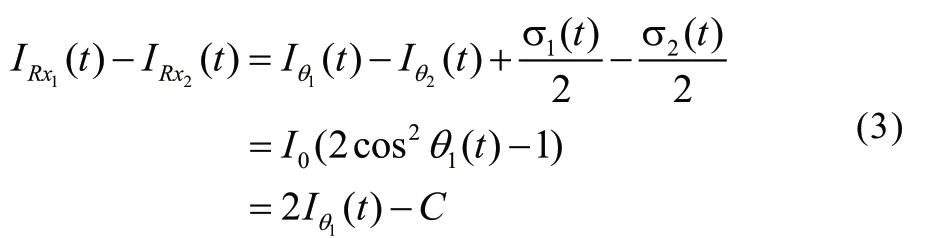
根据马吕斯定律(Malus’law),当一束强度为I0的偏振光通过偏振器后,透射光的强度由Iθ和I0入射光与偏振器二者的偏振方向之间的夹角θ决定,即Iθ=I0cos2θ。而整个系统的噪声σ(t) 由相对较强的自干扰(即RetroSign 之外的物体的反射)、环境光和来自相反方向的车辆光束组成。这些噪声是未偏振的,因此其强度在通过读写器的接收单元的偏振器后将被减弱一半。这样,两个紧密排布的接收单元接收到的信号满足:

其中Iθ1和Iθ2是两个光传感器接收到的信号强度,各自满足马吕斯定律。
互补光学前端设计确保了当液晶调制器的状态转换(例如从“0”到“1”)时,θ1从0°变化为90°,而θ1从90°变化为0°,即θ1与θ2满足的互补特性。对于噪声σ部分,由于两个接收单元紧密排布,接收到的噪声基本上是经历相同路径的环境物体的反射,且在通过偏振器过滤器之前是非偏振光,因而有σ1(t) ≈σ2(t)。通过对两个接收单元的输入作差,就可以得到基于偏振的差分接收(PDR)方案:
PDR 设计不仅抑制了自干扰和其他噪声,而且将接收到的信号强度提高了一倍,大大改善了反射链路的信噪比。我们的原型系统显示PDR 平均实现了5.3 dB 的信噪比增益。
1.2 系统多路访问控制(数据链路)协议
(1)周期性广播与请求-应答模型的论证
路标天生具有局部区域广播的性质,它们被设计用来向所有来车辆传达与位置相关的信息。RetroSign 的基于逆反射的通信链路设计也符合路标的局部区域广播性质。事实上,液晶状态的切换将调制任何来源的入射光线。因此,一个直观的想法是将简单的周期性广播机制作为多路访问控制(数据链路)的基础。然而,当读写器的视野中有多个RetroSign 时,它们的响应一定会发生冲突。也就是说,所有毗邻的RetroSign 都是潜在的冲突方。这种冲突不可能被静态的方式解决:首先,RetroSign 不能感知附近的其他RetroSign 的存在。第二,由于读写器的移动性(即位置不同)和车前照灯功率的多样性(即观察范围不同),整个通信系统高度动态。第三,很难保持一个全局时钟,确保附近的RetroSign 之间的时钟同步,特别是考虑在RetroSign 可能会休眠并被唤醒的情况下。这些原因使我们需要设计一个基于请求-应答模型的数据链路协议。
(2)冲突案例分析
不同的冲突情景说明如图3 所示:
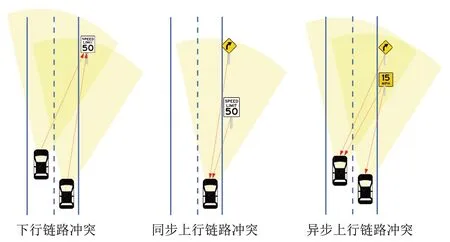
图3 不同的冲突情景说明
下行链路冲突:当一个RetroSign 处于多个读写器的共同视野中,并且有多个读写器试图同时与同一个RetroSign对话时,就会发生这种情况。这就是多对一的通信情况。
同步上行链路冲突:当多个RetroSign 在同一个读写器的视野中并同时被请求时,它们可能会同时作出应答,并导致同步上行链路冲突。这对应于一对多的通信情况。
异步上行链路冲突:在多对多的通信情况下,如果第一个RetroSign 正在应答第一个读写器,而附近的第二个读写器试图请求刚好在第一个读写器视野内的第二个RetroSign 时,第二个RetroSign(对第二个读写器)的上行应答将被第一个读写器接收到,从而破坏第一个RetroSign 正在进行的应答。这将导致异步上行链路冲突。
(3)解决冲突的设计
Discovery Request-Discovery Ack机制:初始状态下,车辆会随机地发送Discovery Request(DReq),当RetroSign 接收到DReq 后,回复一个特定的信号去应答。我们称这个特定的信号为Discovery Ack(DAck)。当车辆接收到DAck 时,则表明其前一次发送的DReq 已经正确地被RetroSign 接收到。如果车辆没有收到DAck,而且在其覆盖范围内有RetroSign 的话,则表明下行链路发生了冲突,之后进行随机退避,等到退避时间结束再次进行DReq。如果在车辆可通信的范围内没有RetroSign,车辆也会将其当作下行链路发生了冲突的情况来处理。
虚拟地址与Query 机制:对于车辆,为每个已发现的RetroSign 预先分配一个全局的ID 并不可行,因为这需要全局地址分配协议,而且必须使用非常大的ID 长度,开销过大。我们设计了一种与车辆ID 相关的虚拟地址(VID,Virtual ID)作为RetroSign 的ID。车辆发送下行帧告诉RetroSign 随机的临时ID 范围,同时告知车辆自身的ID,以及下行帧的序列号。VID 由车辆的ID、下行帧的序列号以及临时ID 组合而成。RetroSign 可以拥有多个VID,但是每个VID 一定只对应一个RetroSign;RetroSign 根据不同车生成的VID 是不一样的;对于同一辆车来说,RetroSign 根据不同下行帧生成的VID 也是不相同的。因此,VID 可以起到RetroSign 全局ID 的作用,读写器可以利用VID 唯一确定RetroSign,并通过发送包含VID 的Query Request(QReq)并接收相应的Query Response(QResp)的信息,解决了同步上行链路冲突的问题。
激发式载波监听(ECS,Excitatory Carrier Sensing):我们采用ECS 机制解决异步上行链路冲突。在读写器不进行其他操作时,默认处于ECS 状态,持续发射载波并监听自身发出的载波是否被有效的RetroSign 反射。当读写器准备发送下行数据时,会先根据ECS 状态下的信道监听情况,判断上行信道是否空闲,如果空闲,则将数据发送。否则,进行随机退避,等待下次发送。ECS 与传统的载波监听不同点在于,传统的载波监听是避免因自己抢占信道而导致通信发生冲突。而ECS 是通过推迟自己的发送时间,进而使得对端的设备(RetroSign)推迟自己的发送时间,从而来避免由对向端点抢占信道而产生的冲突。
2 系统测试与验证
2.1 测试配置
我们在不同的环境、不同的天气和照明条件下对系统进行了评估,如图4 所示。由于上行速率(1 kbps)、误码率、RetroSign 尺寸(大,0.3 m2)、通信距离、阅读器和RetroSign 之间的相对角度距离(垂直)以及实验环境(晴朗的夜晚)都是相互关联的,在下面的结果中,除非特殊说明,所有因素都设置为括号中的默认值。我们使用误码率(BER,Bit Error Rate)作为我们主要的PHY 性能指标。误码率低于1%的通信距离被视作可靠。对于每个数据点,我们发送25 个数据包,每个数据包为16 字节。
2.2 结果
上行速率。从图4(a)中,我们可以得出几点结论。首先,系统实现了长距离通信。即使是1 kbps 的上行速率,读写器依旧可以在80 m 外与光标签通信。其次,上行链路速率与通信距离成反比。这是因为较低的速率意味着LCD 状态变化得更彻底,因此在读写器上检测到的信号间的差距更大。第三,对于相同的上行速率,当通信范围变短时,误码率迅速下降。
RetroSign 尺寸。我们用三个尺寸的RetroSign 进行了实验——大(尺寸为0.3 m2)、小(0.15 m2)和三角警戒牌尺寸(0.025 m2)。结果如图4(b)所示,大尺寸会带来更长的通信距离。但这种关系似乎是高度非线性的,尺寸减半并不导致通信距离减半。即使是最小的三角警戒牌,读写器也能在45 m 外与之通信。
偏航角。因为车灯上的读写器和位于路旁或者路上方的路牌之间由于道路弯曲或者更换车道等,往往有一定的偏航角,所以我们也测试了系统在不同偏航角下的表现。图4(c)告诉我们,在75 m 处系统能容忍±12°的偏航角,而距离在50 m 处则增加到±30°。总体来说,读写器离路牌越近,则偏航角容忍度越大。
翻滚角。车辆上坡等情况会造成的读写器与RetroSign 之间存在翻滚角。图4(d)指出,我们的系统可以容忍±18°的翻滚角。相对于偏航角来说,通信距离对翻滚角造成的影响并没有特别明显。
天气状况。我们在不同的天气状况下进行了实验。尽管直觉上我们容易认为多云和夜间系统表现会更好,而雨水和阳光则会极大削弱系统的通信表现。但图4(e)的结果显示,即使在晴天、雨天和雨夜,系统仍然能够分别实现长达60 m、62 m 和69 m 的通信。
阳光入射角。由于阳光会提升底噪,增加误码率,我们进一步研究其入射角的影响。图4(f)显示了几个特点。其一,小的入射角(即阳光接近直射读写器)会导致读写器无法工作;其二,上行速率越高越容易受到阳光入射的影响。
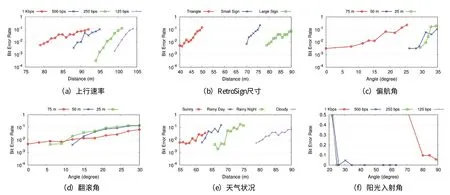
图4 实验结果
3 未来光标签技术发展
3.1 新型读写器
(1)基于光学成像的空间分集动态感知通信一体化
可见光信号的方向性是其相比于射频信号最重要的独特优势,基于方向性的空间分集技术为极多光标签、读写器情境(即现实中拥挤的车路协同场景)下无互相干扰的并发通信带来了可能。利用摄像机等具有光学成像能力的设备作为读写器的接收端,可以实现空间分集的并发光标签读写。此外,光学成像信息还可以与计算机视觉领域的研究进展相结合,在接收逆反射信道通信信息的同时,从视觉信息中获得道路环境感知信息,实现车辆与路牌的定位与追踪,进而成为光学感知通信一体化技术的基础。
(2)基于脉冲视觉的超高速自由动态范围读写
脉冲视觉是一种近年来新兴的计算机视觉模型,具备高时间分辨率、高动态范围等优势。与传统的以帧为单位的视觉系统不同,脉冲视觉参考了灵长类动物视网膜中心凹的结构和信号处理机制,实现了利用密集脉冲阵列感知、采集并重构视觉信息。仿生脉冲视觉有望成为未来光标签系统接收反射光信号的接收器,通过将光信号进行以脉冲的形式接收并进行信号处理(有望与新兴的脉冲神经网络技术自然结合),建立起高速高动态范围逆反射链路,如图5 所示:
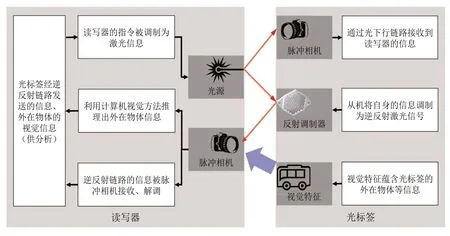
图5 基于脉冲视觉的光标签系统框图
(3)基于激光的高定向长距离低功耗载波
自由空间光通信是指以激光作为载波,大气作为传输介质的光通信技术,其功耗、通信距离、传输带宽等方面的表现强于基于LED 的可见光通信。强指向性是激光作为通信介质的重要特性,对于提升大气信道中的通信距离,降低功耗有着重要的意义。而激光作为光标签逆反射调制的载波,同样可以大幅提升光标签反射链路的通信距离,支持更加复杂的车路协同应用。此外,由于激光的指向性,激光通信还可以与测距、测角技术相结合,实现三维空间精确车辆定位与追踪。
(4)基于可变透镜(组)的光学天线波束成形
当前读写器的光学收发组件较为简单,无法随环境和通信情境改变。光学天线,包括光学透镜组和与之相配合的合束、分束滤光片、棱镜等光学组件,可以对光束进行波束成形与操控,实现空间光信号的增益,提升光信道质量。此外,成形的光波束还可以协助高动态的车路协同场景下设备的捕获、瞄准和跟踪,在车辆、路牌各异的复杂情景下实现最优的通信能量分配,确保高速移动情景的稳定可靠的(逆反射)光通信链路。
3.2 新型光标签
(1)高速反射调制器
反射调制器是光标签实现调制入射光信号功能的核心组件。当前光标签使用液晶调制器作为反射调制器,其原理与常见的液晶显示器相类似,刷新率为几十至几百Hz,进而限制逆反射通信链路的带宽为亚kHz 级。光标签这一概念并不与特定的反射调制器相耦合,基于新材料(ferroelectric 等)或者新原理(如MEMS 技术,如图6 所示)的反射调制器有望在维持光标签技术低功耗特性的同时,极大提升通信带宽,从而可为车路协同传输更复杂的数据。
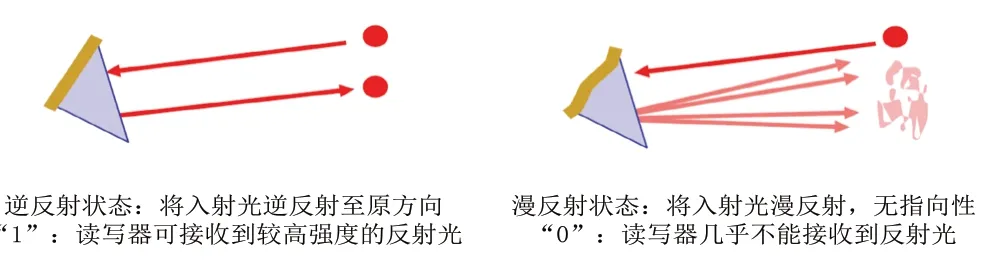
图6 一种可被光标签应用的MEMS反射调制器的原理
(2)光学智能反射面
智能反射面通过在平面上集成大量低成本的无源反射元件,智能地重新配置无线电磁波传播环境,从而显著提高无线通信的性能,近年来已有光学波段的智能反射面设计问世。光学智能反射面可以作为光标签的反射调制器,对光信号进行灵活可编程操控,实现反射光链路的高阶调制(包括振幅、相位、频率和偏振等方面)。此外,智能反射面可实现大范围电磁波频谱进行调制,建立起光电融合的无线(逆反射)车路协同通信系统。
(3)显示通信一体化
显示器已经在城市道路上中得到了广泛的应用与部署,当前的显示器主要用来为人类提供视觉信息,其与计算机系统之间蕴含的可见光通信信道尚未被充分利用。而光标签技术也可进一步与显示器结合,在不影响正常图像显示效果的同时,利用额外的、人类不可见的信道向读写器(车辆)传输信息,从而提升现有显示基础设施对计算机系统传输信息的能力,为虚拟现实、增强现实等车路深度融合技术提供显示通信一体化的底层技术支持。
(4)细粒度信道建模
随机多变的大气信道会对光通信的信号传输带来干扰,特别是在气象环境恶劣的城市场景中,大气中烟、雾、霾、雪、气溶胶等粒子受到车流的持续扰动,会引起光的不规律吸收和散射,极大影响光信号的质量。对于光标签系统来说,逆反射的特性使得光信号通过大气的距离是一般光通信的两倍,而且逆反射信道的特性与普通的光通信信道也有所差异,因而大气信道特性对通信性能有着更大的影响。细粒度的大气信道建模可以帮助理解环境对通信的影响因素,进而调优系统性能,提升车路协同的稳定性。
4 光车路协同应用场景与展望
4.1 智能座舱与增强辅助驾驶
随着车路协同的深入发展,智能座舱技术和基于增强现实的增强辅助驾驶也崭露头角。光标签定位技术使光标签可以作为锚点,让读写器感知到光标签在以车辆为中心的三维世界的坐标。若结合未来的车载抬头显示(如智能眼镜、全息前挡风玻璃),则可以形成增强辅助驾驶系统。
当驾驶员进入了智能座舱,并激活了抬头显示,便可以通过语音或者眼动的方式来与增强辅助驾驶系统交互。驾驶员可以利用汽车头灯内整合的光标签读写器,结合抬头显示中的视野区域,来与光标签进行选择性通信。驾驶员通过眼动追踪等方式来筛选目标光标签,不需分神用手操作,这极大提升了驾驶员专注度。同时,被激活的光标签将以全息图的形式叠加在驾驶员的增强视野中,驾驶员可以直接在抬头现实中看到远方路牌所提示的限速、急弯、信号灯的状况,更加及时地做出相应的动作。同时,光标签也可将弱光下的安全隐患,如过暗的故障车辆和行人等,以全息图的形式提前告知驾驶员。若车灯与车牌之间存在链式VLBC 通信,后车的驾驶员也可以在增强视野中提前看到被前车或者拐弯处遮挡的行人、车辆等。这对山路、施工路段等盲区较多的情景有很大的裨益。
在高速动态的场景下,传统的无线电技术往往难以使驾驶员实现与环境中目标智能设备的快速交互。然而借助光标签技术,驾驶员在使用抬头显示的情况下,不需分神即可快速完成对周遭环境中光标签的询问和交互,并获取增强的驾驶辅助信息。我们有理由相信,载有光标签的增强现实锚点会成为未来增强辅助驾驶的组成部分。
4.2 光车路协同
光车路协同示例如图7 所示:
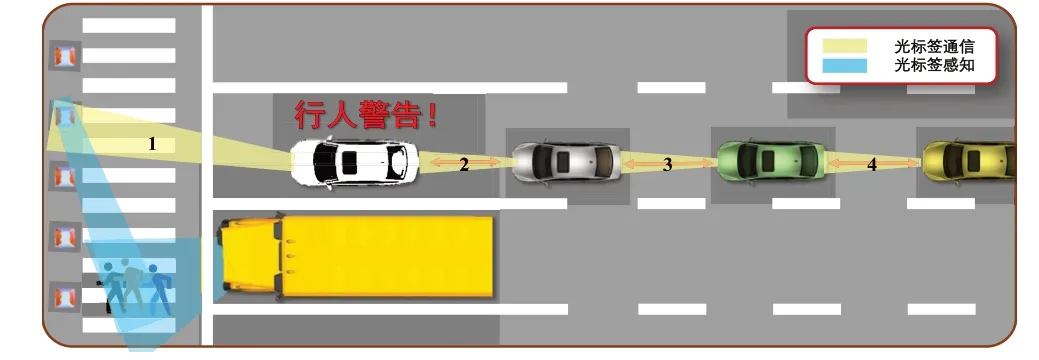
图7 光车路协同示例
由于交通基础设施在道钉、路牌甚至道路标识线等位置大量使用了逆反射材料,基于光标签技术的逆反射通信极易与现有的交通基础设施结合,使得以低成本和简易的部署流程打造大规模智能基础设施成为可能。光标签与智能基础设施的结合为光车路协同创造了条件。
楔形道钉被广泛部署在城市人流密集路口,或加装于高速公路车道旁护栏,以在弱光条件下增强司机对行人通道的可见度。传统的道钉仅使用了逆反射材料结合特定的聚光结构,来对远处的行车车灯进行反射。在驾驶员视角下,连续的道钉组成了道路的边沿线,拟合出夜间的行车路线。然而,面对夜间行人穿梭、高速路动物穿梭等高动态突发情况,逆反射材料的高亮性反倒使得驾驶员不容易发现较暗的移动物体,容易带来安全隐患。倘若将光标签技术与道钉结合,则可以带来兼具低成本和高性价比的智能道钉。一方面,道钉可以融合被动运动感知技术,通过红外、热辐射等信息感知移动物体。另一方面,道钉的逆反射材料层可以被制作成为光标签。由于其具有反应性,则可以仅在需要的时刻通过光标签上行链路将感知信息通知来车。这样,光标签智能道钉可以极低的功耗全天候检测移动物体,并帮助远处的来车及时对动态情况做出反应。光通信的强方向性也使得信息传递局限在局部交通范围内,并可以通过尾灯向加装了光标签的后车车牌链式传递,使得后车可以提前做出机动。
相较于基于无线电技术的DSRC 和C-V2X,光通信,尤其是光逆反射通信,以其信号的方向性,在部分的高移动性、高不确定性的交通场景下具有得天独厚的优势。基于光信号的V2X 通信可与基于无线电信号的V2X 通信相辅相成,共同成为未来智慧城市与智慧交通的基石。
5 结束语
本文介绍了光标签技术的基本原理和现阶段光标签技术的实验表现,并从光标签技术本身、单车级应用以及车路协同级应用等方面对光标签技术未来的应用与发展进行展望。作为一种与C-V2X 优势互补的车路协同技术,光标签技术仍面临技术自身演进、标准制定、应用场景扩展等诸多挑战。我们有理由相信,随着光标签技术自身的多轮迭代,智能座舱及增强辅助驾驶系统的逐步革新,车路协同技术的多样化发展,未来的驾驶定会兼有安全与舒适,聪明的车和智慧的路定会更好地造福人类社会。
