基于多传感器融合的植保无人机自主着陆系统
2021-12-14于坤林于明清
于坤林,于明清
(长沙航空职业技术学院,湖南长沙,410124)
0 引言
目前,无人机自主着陆技术主要采用精密进场雷达着陆引导技术、微波着陆引导技术、卫星导航着陆引导技术和计算机视觉着陆引导技术等着陆技术[1-2],这些单一的着陆技术都存在比较大的缺点:要么不能较好地获得无人机的位姿信息,要么不能精确地获得无人机与着陆点之间的高度信息,从而影响无人机的精确着陆。为了使植保无人机准确着陆,可以考虑将高度传感器[3]和机器视觉传感器结合在一起,组成一款多传感器融合的无人机自主着陆系统,着陆系统中采用多个高度传感器来测量无人机的着陆高度,采用视觉传感器来测量无人机的位姿信息,将多传感器融合技术应用于农业植保无人机自主着陆当中,有效地解决了植保无人机精准自主着陆问题。
1 系统总体架构设计
基于多传感器融合的植保无人机自主着陆系统主要由高度测量系统、机器视觉系统、飞行控制系统三部分组成。其中高度测量系统主要由气压传感器模块、超声波传感器模块和激光传感器模块等组成。机器视觉模块由CCD摄像头、图像采集卡、视觉处理模块三部分组成。基于多传感器融合的植保无人机自主着陆系统总体架构设计框图如图1所示。

图1 基于多传感器融合的植保无人机自主着陆系统总体架构设计框图
高度测量系统解算出高度信息,机器视觉系统解算出无人机的俯仰角、滚转角和航向角等姿态信息以及位置信息;植保无人机自主着陆系统最终将高度测量解算出的高度信息和机器视觉系统解算出的位姿信息进行数据融合,飞行控制系统依据融合后的高度、姿态和位置等信息精准控制农业植保无人机的自主着陆。
1.1 高度测量系统
植保无人机高度测量系统由气压传感器模块,激光传感器模块,超声波传感器模块和微控制器四个部分组成。三个测高模块均与微控制器连接,高度测量系统把三个高度传感器测量出的高度通过加权平均算法进行数据融合,从而解算出高度信息,得到适合植保无人机低空飞行的高精度数据。
1.1.1 气压传感器
气压传感器通过测量无人机所在高度的大气压强能够间接地获得无人机的高度,气压传感器测高公式如下:

式中:Tb是高度Hb时的温度,β是温度垂直变换率,PH和Pb分别为高度H和Hb时对应的大气压强,R是空气专用气体数,是重力加速度。
1.1.2 激光传感器
激光传感器由激光发射器、激光接收器以及雪崩光电二极管组成。其测高原理为:由激光发射器对准地面发射激光脉冲,激光经地面反射后部分被激光接收器接收,成像到雪崩光电二极管上并被放大,因此它能检测到微弱的激光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定无人机的飞行或着陆高度。
1.1.3 超声波传感器
超声波传感器主要由发送器部分、接收器部分和控制部分构成。超声波传感器测高原理是通过超声波发射器向地面发射超声波,并根据超声波往返的时间差来计算无人机离地面高度。测高公式采用:

其中,c 表示声波在空气中传播速度,一般为 340m/s,t 表示传播时间。
1.2 机器视觉系统
机器视觉模块由CCD摄像头、图像采集卡、视觉处理模块三部分组成。机器视觉测量系统中的CCD图像传感器主要由CCD电荷耦合器件制成,它能实时拍摄着陆点地面标志图像,图像采集卡带有外接的信号接口与CCD图像传感器相连,图像采集卡可以将CCD图像传感器拍摄的地面图像采集进来并送到视觉处理模块;视觉处理模块以STM32F427CPU为核心,它拥有丰富的硬件资源和扩展接口,它将采集到的图像进行图像处理、特征提取以及位姿估计,机器视觉系统最终解算出无人机的俯仰角、滚转角和航向角等姿态信息及位置信息。
1.3 飞行控制系统
飞行控制系统主要由传感器、机载计算机和伺服作动设备组成,飞行控制系统依据融合后的高度、姿态和位置等信息,通过高效的控制算法和主控制单元去控制农业植保无人机的着陆。
2 系统软件设计
基于多传感器融合的植保无人机自主着陆算法流程为:机器视觉系统中的CCD图像传感器将着陆点地面识别标志进行采集,然后视觉处理模块对采集到的地面识别标志图像进行图像滤波等图像预处理,然后再对地面识别标志图像进行特征提取、特征匹配和位姿估计得到位置和姿态信息。同时高度测量系统对气压传感器,激光传感器和超声波传感器测量出的3个高度进行自适应高度加权平均融合算法得出高精度的高度信息。植保无人机自主着陆系统最终将机器视觉系统解算出的位置、姿态信息以及高度测量系统解算出的高度信息进行数据融合,最后依据融合后的高度、位置和姿态等信息进行植保无人机自主着陆。整个基于多传感器融合的植保无人机自主着陆算法流程如图2所示。

图2 基于多传感器融合的植保无人机自主着陆算法流程
3 算法分析及实验
3.1 高度测量
为了防止高度测量不准确,高度测量系统采用了气压传感器、超声波传感器和激光传感器等三个不同的传感器来测量植保无人机与着陆点间的相对高度,并将三个传感器各时刻测量出的高度值采用自适应加权平均算法进行数据融合处理,从而保证了高度测量的精准性。
对三个高度传感器测量出的高度数据采用了加权平均算法为:

其中的系数(k1,k2,k3)称权,他说明该系数后面的数据在整个统计数据中占的比重.也说明这个数据对统计结果的影响程度。h1、 h2、 h3分别为气压传感器、超声波传感器和激光传感器的测量高度,h为采用加权平均算法后的无人机高度。
3.2 目标识别和位姿估计
目标识别算法包括对着陆地标彩色图像进行降维处理、噪声消除,边缘检测和特征点提取等图像处理[4]。
3.2.1 降维处理
边缘信息是识别物体的关键因素,通过灰度图像可以检测其边缘,因此识别物体一般只需要识别物体的灰度图就够了。而RGB彩色图像则由于能够提供的信息量很少,但计算量会会很大,因此在目标识别时,需要将RGB彩色图像作降维处理,将三维彩色图像降为二维灰度图像。 也就是说要对彩色图像进行灰度化处理。
3.2.2 噪声消除
噪声消除方法主要有均值滤波和中值滤波方法。由于均值滤波容易使图像细节模糊,滤波效果不好,所以通常采用中值滤波方法去噪。中值滤波是一种最常用的非线性信号处理方法,该滤波方法是采用一个奇数点的滑动窗口,将窗口中心点的值用窗口内所有点的中值来代替。中值滤波的窗口形状和尺寸会影响滤波效果,常用的中值滤波窗口形状有方形、线状、圆形、十字形等。这里采用 3×3 窗口对图像进行中值滤波,对含有噪声的着陆地面标志灰度图像进行滤波仿真实验如图3所示。

图3 无人机着陆地面标志图像滤波处理
3.2.3 边缘检测
边缘检测是识别物体最常用的方法,常用的边缘检测算法有roberts算子、sobel算子、prewitt算子以及canny算子、Laplacian算子、LOG算子等。由于噪声点对边缘检测影响较大,所以在边缘检测时必须消除噪声,而LOG算子是由高斯滤波和拉普拉斯算子结合形成的高斯拉普拉斯算子,该算子同时具有滤波和边缘检测的功能,所以这里可以采用LOG算子对着陆地面标志灰度图像进行边缘检测。由高斯滤波和拉普拉斯算子结合由高斯函数根据拉普拉斯算子的公式求导可得:

采用LOG算子进行图像边缘检测的基本步骤如下:
(1)采用高斯滤波器对噪声图像进行平滑滤波去噪;
(2)采用拉普拉斯算子对滤波后的图像进行增强处理;
(3)依据二阶导数零交叉对增强后的图像进行边缘检测。对着陆地面标志灰度图像进行边缘检测的仿真实验如图4所示。

图4 无人机着陆地面标志图像边缘检测
零交叉检测自动选择的阈值为0.0119;Log算子自动选择的阈值为0.0062;对比图4中的三幅图可以看出:图4(b)由于没有对图像进行滤波而直接对图像进行边缘检测,所以含有大量的噪声且引起了伪边缘,图4(c)虽滤除了噪声但丢失了一些边缘细节,只有图4(d)边缘定位准确性最高,有较强的去噪能力,边缘检测效果最好。因此这里选用自动阈值的LOG算子对滤波后的农业植保无人机着陆点的地面标志图像进行边缘检测。
3.2.4 特征点提取
图像和参考图像的特征点也是无人机位置和姿态估计的关键,Harris角点检测算法是一种常用的图像特征点提取方法。提取特征点之后,再通过角点匹配算法可以将当前图像的角点与参考图像的角点进行匹配,根据旋转矩阵解算出无人机的姿态角,并根据视觉标志质心与图像中心的位置关系及相机成像原理实现视觉标志的位置估计[5]。对地面标志进行特征点提取的仿真实验如图5所示。
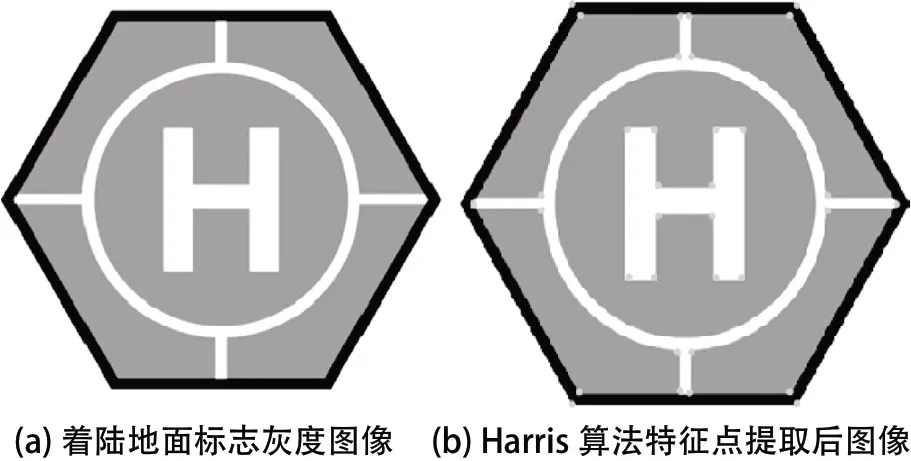
图5 无人机着陆地面标志特征点提取后的图像
4 结束语
本文设计的多传感器融合植保无人机自主着陆系统能够精确地测量低空植保无人机飞行或着陆高度,能够准确地识别着陆点地标并能解算出无人机的着陆位置以及无人机的姿态信息,从而能够实现无人机的自主精准着陆。本设计解决了依靠单一的着陆技术所存在的一些问题,具有比较好的应用价值。
